Download as pdf or txt
You might also like
- Whirling Experimental Lab - S2007Document7 pagesWhirling Experimental Lab - S2007Abhinav Bansal100% (2)
- Seismic Data AcquisitionDocument58 pagesSeismic Data AcquisitionWrick GhoshNo ratings yet
- Fundamental of Seismic - TM - 2013Document39 pagesFundamental of Seismic - TM - 2013Last WinterNo ratings yet
- Fundamental of Seismic 2014Document39 pagesFundamental of Seismic 2014Hecate MikuNo ratings yet
- Chapter 3Document22 pagesChapter 3Wubayehu DessalegnNo ratings yet
- Seismic RefractionDocument30 pagesSeismic Refractionvelkus2013100% (2)
- Seismic WavesDocument49 pagesSeismic WavespsycobotNo ratings yet
- Fundamental of SeismicDocument66 pagesFundamental of SeismicFitria Thebest InYourlifeNo ratings yet
- Basic Seismic - UCL - UKDocument37 pagesBasic Seismic - UCL - UKMuhammad BilalNo ratings yet
- Earth Quake DesignDocument13 pagesEarth Quake DesignRanie boy CabanillaNo ratings yet
- Seismic Refraction SurveyingDocument58 pagesSeismic Refraction SurveyingMohammadFaisalQureshiNo ratings yet
- Fundamental of Seismic MethodDocument27 pagesFundamental of Seismic Methodradheshyamyadav100% (1)
- Topic 1B - Earth QuakeDocument32 pagesTopic 1B - Earth QuakeXver MLNo ratings yet
- Elements of Seismic Surveying PDFDocument51 pagesElements of Seismic Surveying PDFShawki BsatNo ratings yet
- Module 1Document81 pagesModule 1Anjana MVNo ratings yet
- Longitudinal (Compressional) Wave (P-Wave) : Longitudinal Waves Are Waves That Have SameDocument8 pagesLongitudinal (Compressional) Wave (P-Wave) : Longitudinal Waves Are Waves That Have SameتريليونNo ratings yet
- Geo FinalsDocument176 pagesGeo FinalsRizette PaloganNo ratings yet
- Seismic RefractionDocument27 pagesSeismic RefractionMohFekry100% (2)
- Seismic Methods: Special Thanks To Prof - DR: Maher MesbahDocument58 pagesSeismic Methods: Special Thanks To Prof - DR: Maher MesbahKareem TaherNo ratings yet
- WaveDocument70 pagesWaveTfk BajaNo ratings yet
- Abdul Muneeb-04111713063 (ES-394)Document11 pagesAbdul Muneeb-04111713063 (ES-394)Zeeshan ahmedNo ratings yet
- Chapter One Introduction To Earthquakes and Earthquakes EngineeringDocument8 pagesChapter One Introduction To Earthquakes and Earthquakes EngineeringAhmed Abd-AlmoujoodNo ratings yet
- Seismic WavesDocument31 pagesSeismic WavesYounas BilalNo ratings yet
- IB PH SL Waves NotesDocument13 pagesIB PH SL Waves NotesT-girlNo ratings yet
- Siesmic WavesDocument31 pagesSiesmic WavesHizbUllahNo ratings yet
- Fundamental of SeismicDocument72 pagesFundamental of SeismicCaca AurelNo ratings yet
- Fundamental of Seismic Genap 2013-2014 TGDocument66 pagesFundamental of Seismic Genap 2013-2014 TGFandy MuhammadNo ratings yet
- Dr. A. B. Danie Roy: Faculty of Civil Engineering Thapar University, PatialaDocument33 pagesDr. A. B. Danie Roy: Faculty of Civil Engineering Thapar University, Patialaprateek buddyNo ratings yet
- TG - Fundamental of Seismic - Ganjil - 20-21Document67 pagesTG - Fundamental of Seismic - Ganjil - 20-21wahyu robiulNo ratings yet
- Waves Earthquake ExplosionDocument17 pagesWaves Earthquake Explosionprithviraj1990No ratings yet
- Seismic Stag 6343Document67 pagesSeismic Stag 6343akujeeNo ratings yet
- Geophysics 23thjune10Document23 pagesGeophysics 23thjune10Dev InaNo ratings yet
- EqDocument30 pagesEqChar CharNo ratings yet
- Mathematics Science Space Time Energy Medium Restoring ForcesDocument6 pagesMathematics Science Space Time Energy Medium Restoring ForcesMerry Lovelyn CelezNo ratings yet
- Types of WavesDocument27 pagesTypes of Wavestangudusrikanth513gmNo ratings yet
- Geophysics Note2Document52 pagesGeophysics Note2Misbahu AbubakarNo ratings yet
- Introduction To Earthquake Seismology: Assignment 2Document6 pagesIntroduction To Earthquake Seismology: Assignment 2Mohamed ElsayedNo ratings yet
- EQE-5160 Engineering Seismology: Seismic WavesDocument31 pagesEQE-5160 Engineering Seismology: Seismic Waveswaleed hassanNo ratings yet
- Refraction SurveyDocument37 pagesRefraction SurveyRomeo LourdurajNo ratings yet
- PH 11 Waves NotesDocument11 pagesPH 11 Waves NotesTikeshwar Sharma100% (1)
- 8.00 Seismic WavesDocument36 pages8.00 Seismic WavesMohammad AlhajNo ratings yet
- Rayleigh Wave - WikipediaDocument5 pagesRayleigh Wave - Wikipediaghhhf gfffhNo ratings yet
- Introduction Seismic Methods - Refraction SeismicDocument107 pagesIntroduction Seismic Methods - Refraction SeismicMohammed AmerNo ratings yet
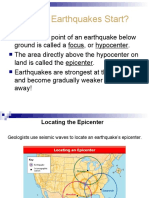
- Where Do Earthquakes Start?Document22 pagesWhere Do Earthquakes Start?diksha singhNo ratings yet
- Unit 1 LESSON 1 2Document8 pagesUnit 1 LESSON 1 2kachechiekurosakiNo ratings yet
- Laporan Praktikum FisbatDocument22 pagesLaporan Praktikum FisbatIRFAN TSANY RAHMAWANNo ratings yet
- Earthquake Engineering2Document147 pagesEarthquake Engineering2Mariz Ellaine Baltazar83% (6)
- (PE) (Long) Seismic Waves and The Earth's InteriorDocument8 pages(PE) (Long) Seismic Waves and The Earth's Interiorjcb1961No ratings yet
- Seismic Wave: Body Waves Surface WavesDocument17 pagesSeismic Wave: Body Waves Surface WavesMikaella Viador100% (2)
- Chill Summer Beach Minitheme For Marketing by SlidesgoDocument10 pagesChill Summer Beach Minitheme For Marketing by SlidesgoISABEL LE XI GANNo ratings yet
- Seismic Wave Demonstrations and Animations: Page 1 of 18Document18 pagesSeismic Wave Demonstrations and Animations: Page 1 of 18FerdianNo ratings yet
- Types of Waves - SemDocument20 pagesTypes of Waves - Semtangudusrikanth513gmNo ratings yet
- Rayleigh Wave by AjuDocument5 pagesRayleigh Wave by AjuAjab SinghNo ratings yet
- Capitulo 3 3. Elements of Seismic SurveyingDocument4 pagesCapitulo 3 3. Elements of Seismic SurveyingBryham MartinezNo ratings yet
- Matsuno 1966Document19 pagesMatsuno 1966elsanto1313No ratings yet
- Waves and LightDocument21 pagesWaves and LightTheEinsteinofTomorrowNo ratings yet
- Chapter 4 Propagation of Seismic DisturbanceDocument7 pagesChapter 4 Propagation of Seismic DisturbanceGabriel LopezNo ratings yet
- Geo 11 Seismic Waves and Ocean 1 02122022 111206amDocument30 pagesGeo 11 Seismic Waves and Ocean 1 02122022 111206amhamzakhanNo ratings yet
- 5 - Earthquakes and Related HazardsDocument60 pages5 - Earthquakes and Related HazardsVincent GalleraNo ratings yet
- Seismology Sep27 29Document28 pagesSeismology Sep27 29Lisette SilvaNo ratings yet
- Rotational Inertia Lab ReportDocument8 pagesRotational Inertia Lab Reportbrian100% (1)
- Physics 20 July 2021 (SHIFT - 1) Question With SolutionDocument17 pagesPhysics 20 July 2021 (SHIFT - 1) Question With SolutionMehul MayankNo ratings yet
- General Physics 1: Quarter 2 - Module 3: Harmonic MotionDocument29 pagesGeneral Physics 1: Quarter 2 - Module 3: Harmonic MotionMarkJosephDichosoRabelasNo ratings yet
- Thermodynamics NotesDocument16 pagesThermodynamics Notesmuneerahmed7130100% (1)
- Rao 1982Document9 pagesRao 1982mechdualNo ratings yet
- Birla Institute of Technology and Science, Pilani: Pilani Campus AUGS/ AGSR DivisionDocument2 pagesBirla Institute of Technology and Science, Pilani: Pilani Campus AUGS/ AGSR DivisionParth PolNo ratings yet
- Behavior and Design of Ductile Multiple-Anchor Steel-To-Concrete Connections PDFDocument216 pagesBehavior and Design of Ductile Multiple-Anchor Steel-To-Concrete Connections PDFKevin HenryNo ratings yet
- 3.3. Rates of Change and Rectilinear Motion PDFDocument8 pages3.3. Rates of Change and Rectilinear Motion PDFellisdavidnicholasNo ratings yet
- Second Order EffectDocument2 pagesSecond Order Effectshantanu chowdhuryNo ratings yet
- Using Ms Excel For Data Analysis and SimulationDocument15 pagesUsing Ms Excel For Data Analysis and SimulationchanayireNo ratings yet
- The Computer Simulation of Dispersed Two Phase Flows David Hill PHD 1998Document371 pagesThe Computer Simulation of Dispersed Two Phase Flows David Hill PHD 1998AghajaniNo ratings yet
- Vane Shear TestDocument10 pagesVane Shear TestManikyaMayankNo ratings yet
- Comparison of Horizontal Lip Pressure - R0Document2 pagesComparison of Horizontal Lip Pressure - R0AndiNo ratings yet
- Joel Smoller and Blake Temple - Cosmology With A Shock-WaveDocument34 pagesJoel Smoller and Blake Temple - Cosmology With A Shock-WaveCola7890No ratings yet
- SPE-189826-MS DFIT Analysis in Low Leakoff Formations: A Duvernay Case StudyDocument15 pagesSPE-189826-MS DFIT Analysis in Low Leakoff Formations: A Duvernay Case StudyMohammed IbrahimNo ratings yet
- TN290 Vibrations 0125142Document28 pagesTN290 Vibrations 0125142Trade TradNo ratings yet
- 9A01308 Fluid Mechanics & Hydraulic MachineryDocument4 pages9A01308 Fluid Mechanics & Hydraulic MachinerysivabharathamurthyNo ratings yet
- Flow Chart AISC 358-11Document3 pagesFlow Chart AISC 358-11Willy SetiawanNo ratings yet
- DNVGL CG 0060Document43 pagesDNVGL CG 0060Btwins123No ratings yet
- ENGR 474 - Course ReportDocument3 pagesENGR 474 - Course ReportMohammed NasserNo ratings yet
- Air Entrainment in Manhole Drops-Paper - Final - ReviewedDocument8 pagesAir Entrainment in Manhole Drops-Paper - Final - ReviewedManuel SueroNo ratings yet
- Sample Problem No. 5 Sample Problem No. 6Document2 pagesSample Problem No. 5 Sample Problem No. 6MelvinGutierrezSingayanNo ratings yet
- J2P and P2J Ver 1Document590 pagesJ2P and P2J Ver 1Manda Ramesh BabuNo ratings yet
- Igcse Physics p1 2016 2021 v2Document514 pagesIgcse Physics p1 2016 2021 v2Rayyan NaumanNo ratings yet
- (9-25) Performance Graded Bitumen SpecificationsDocument10 pages(9-25) Performance Graded Bitumen Specificationshasif21No ratings yet
- Notes On The Motion of Fluid in A Curved PipeDocument16 pagesNotes On The Motion of Fluid in A Curved Pipeparticleperson100% (1)
- Noise PollutionDocument17 pagesNoise Pollutionmelannie adanteNo ratings yet
- Extended Abstract - Mauro MonteiroDocument10 pagesExtended Abstract - Mauro MonteiroprachiNo ratings yet