Download as pdf or txt
You might also like
- ASHRAE Duct DesignDocument13 pagesASHRAE Duct DesignJose Darwin Margate100% (2)
- Ese559 Jul2022 FinalDocument10 pagesEse559 Jul2022 FinalAmirul HazzmiNo ratings yet
- Ese559 Jul2021 FinalDocument7 pagesEse559 Jul2021 FinalAmirul HazzmiNo ratings yet
- Svcet Svcet: B. E./B.Tech. Degree Examination, Apriiimay 2005Document4 pagesSvcet Svcet: B. E./B.Tech. Degree Examination, Apriiimay 2005lllllllllllNo ratings yet
- Amrita Vishwa Vidyapeetham: Answer All QuestionsDocument2 pagesAmrita Vishwa Vidyapeetham: Answer All QuestionsKRISHNAPRIYANo ratings yet
- Using An Appropriate Software Package Express The Following Algebraic Fraction As Partial FractionsDocument5 pagesUsing An Appropriate Software Package Express The Following Algebraic Fraction As Partial FractionsAnuruddha WijerathneNo ratings yet
- SimbuDocument3 pagesSimbu84- R. SilamabarasanNo ratings yet
- Pandit Deendayal Petroleum University: Semester - IIIDocument2 pagesPandit Deendayal Petroleum University: Semester - IIIsahil borichaNo ratings yet
- Advanced Marine ControlDocument14 pagesAdvanced Marine ControlNitin ChaurasiaNo ratings yet
- In Semester (Individual) AssignmentDocument10 pagesIn Semester (Individual) AssignmentmuhammadNo ratings yet
- PTEE7301 April-2022Document3 pagesPTEE7301 April-2022imman46920No ratings yet
- PTEE7301 April-2021Document2 pagesPTEE7301 April-2021imman46920No ratings yet
- Jntua University Previous Question Papers: Dept., of E.C.E, RCEWDocument25 pagesJntua University Previous Question Papers: Dept., of E.C.E, RCEWpala abishayNo ratings yet
- Polytechnic of Namibia: M Ark Moderated M Ark Exam Ine RsDocument3 pagesPolytechnic of Namibia: M Ark Moderated M Ark Exam Ine Rsmoses kakwenaNo ratings yet
- 6th Sem PapersDocument12 pages6th Sem Papers21BEE044 MANOJ KHEMANINo ratings yet
- EE302 MidSem Oct2021Document1 pageEE302 MidSem Oct2021Gingka HaganeNo ratings yet
- II B.Tech II Semester, Regular Examinations, April/May - 2012 Control SystemsDocument8 pagesII B.Tech II Semester, Regular Examinations, April/May - 2012 Control SystemsViswa ChaitanyaNo ratings yet
- Electrical Machines IIDocument8 pagesElectrical Machines IIMahesh JohnnyNo ratings yet
- The LNM Institute of Information Technology Ece and Cce ECE 321: Control System Engineering (End-Term Examination)Document17 pagesThe LNM Institute of Information Technology Ece and Cce ECE 321: Control System Engineering (End-Term Examination)Kunal ChamoliNo ratings yet
- Power System Operation and Control 6th Sem EEE ELECTRICAL M508Document2 pagesPower System Operation and Control 6th Sem EEE ELECTRICAL M508santoshsahoo2507No ratings yet
- CS KOM Fin Jan2021-V2Document1 pageCS KOM Fin Jan2021-V2Osman Agâh YILDIRIMNo ratings yet
- Homework #3 For Everyone (5pts Each) :: Universidad Popular Del CesarDocument2 pagesHomework #3 For Everyone (5pts Each) :: Universidad Popular Del Cesarstalin roblesNo ratings yet
- NovemberDecember 2020Document1 pageNovemberDecember 2020Narmada BheemaNo ratings yet
- Lab2 QPDocument2 pagesLab2 QPsivasrinivas venigallaNo ratings yet
- Name/Signature: EE496B - Controls Lab - Fall 2021Document2 pagesName/Signature: EE496B - Controls Lab - Fall 2021kasun prabhathNo ratings yet
- PastPapersDownload (6) - 220227 - 212448Document11 pagesPastPapersDownload (6) - 220227 - 212448Deer DeerNo ratings yet
- Institute of Space Technology: Department of Aeronautics & AstronauticsDocument4 pagesInstitute of Space Technology: Department of Aeronautics & AstronauticsMuhammad Ubaid RazaNo ratings yet
- Homework #1: Hint: You Can Use The Matlab Function Polyval To Evaluate The Numerator and DenominatorDocument3 pagesHomework #1: Hint: You Can Use The Matlab Function Polyval To Evaluate The Numerator and DenominatorMuhammed Hasan GUCLUNo ratings yet
- Dec. EC409-C - Ktu QbankDocument3 pagesDec. EC409-C - Ktu QbankNISHANT KUMARNo ratings yet
- Ys Us S S: BG3102 Control in Biosystems AssignmentDocument2 pagesYs Us S S: BG3102 Control in Biosystems AssignmenteliasNo ratings yet
- Part-I:: in Out in OL in OH inDocument2 pagesPart-I:: in Out in OL in OH inanupnaskar naskarNo ratings yet
- S V Engineering College For Women: Eee - ADocument2 pagesS V Engineering College For Women: Eee - ADEPARTMENT OF EEE SVEWNo ratings yet
- Ese 18 TestDocument8 pagesEse 18 Testsourabh.alase26No ratings yet
- Electrical Machines and Controls Ree 409Document2 pagesElectrical Machines and Controls Ree 409UTTKARSH SACHANNo ratings yet
- UFMFV7-15-2 Control (2017 November)Document6 pagesUFMFV7-15-2 Control (2017 November)Nuwan AsankaNo ratings yet
- ELE 4623: Control Systems: Faculty of Engineering TechnologyDocument14 pagesELE 4623: Control Systems: Faculty of Engineering TechnologyMaitha SaeedNo ratings yet
- Sr05220205 Control SystemsDocument8 pagesSr05220205 Control SystemsandhracollegesNo ratings yet
- Problem Set 5Document6 pagesProblem Set 5PeaceNo ratings yet
- Control Systems Group Project 2Document3 pagesControl Systems Group Project 2Yu-Yun ChangNo ratings yet
- Model Predictive Control of A DC-DC Buck ConverterDocument7 pagesModel Predictive Control of A DC-DC Buck ConverterMeral MeralNo ratings yet
- Used Paper March-2021: K Gs Ss S SDocument2 pagesUsed Paper March-2021: K Gs Ss S SShiva GlennNo ratings yet
- Digital Control Systems May 2007 Question PaperDocument8 pagesDigital Control Systems May 2007 Question Paperelimelek100% (3)
- Chemical Process Control: Additional 30 Minutes To Complete and Submit This Paper. The Additional 30 Minutes Are ForDocument12 pagesChemical Process Control: Additional 30 Minutes To Complete and Submit This Paper. The Additional 30 Minutes Are ForIffatNo ratings yet
- CE Model Question Paper 2019 - 16ME72Document3 pagesCE Model Question Paper 2019 - 16ME72ashitaNo ratings yet
- FE - Sample 2 (With Answers)Document12 pagesFE - Sample 2 (With Answers)tghafiyzafryNo ratings yet
- Control A Final 21 SummerDocument2 pagesControl A Final 21 Summermariomourad12No ratings yet
- Electrical Machines Controls Nee 409 Eee 409 2015 16Document2 pagesElectrical Machines Controls Nee 409 Eee 409 2015 16Mulu GirmayNo ratings yet
- Nr220405-Control SystemsDocument8 pagesNr220405-Control SystemsSRINIVASA RAO GANTANo ratings yet
- Control SystemsDocument8 pagesControl SystemsprakashjntuNo ratings yet
- Svcet: B.E"/B.Tech. Degree Examination, November/December 2005Document3 pagesSvcet: B.E"/B.Tech. Degree Examination, November/December 2005lllllllllllNo ratings yet
- EEE3005 Exam PaperDocument6 pagesEEE3005 Exam PaperEthan OwNo ratings yet
- B.SC H Computer Sci kupvWYfDocument6 pagesB.SC H Computer Sci kupvWYfShaanNo ratings yet
- Lab 3 - HandoutDocument7 pagesLab 3 - HandoutohmprakashNo ratings yet
- Old Question Paper Control SystemsDocument7 pagesOld Question Paper Control SystemsSatendra KushwahaNo ratings yet
- EEE402 Exp09 NewDocument5 pagesEEE402 Exp09 Newanon_181037318No ratings yet
- 21EC45T Control SystemDocument7 pages21EC45T Control SystemM.N.MD. FaheemNo ratings yet
- Sheet 3Document2 pagesSheet 3bipico9217No ratings yet
- DC Servo Paper - Cse007Document4 pagesDC Servo Paper - Cse007DrPrashant M. MenghalNo ratings yet
- Design and Implementation of Portable Impedance AnalyzersFrom EverandDesign and Implementation of Portable Impedance AnalyzersNo ratings yet
- 03 Study Focus 2Document10 pages03 Study Focus 2Alisa RamićNo ratings yet
- CIMAC Fuel RecommendationsDocument3 pagesCIMAC Fuel Recommendationschemicalchouhan9303100% (1)
- 1415 Exam 1 Answers (ICP) (EN)Document8 pages1415 Exam 1 Answers (ICP) (EN)김하은No ratings yet
- ISV SM Ch10Document69 pagesISV SM Ch10손은결No ratings yet
- K0101-01 - Danh Muc Ban Ve C&iDocument13 pagesK0101-01 - Danh Muc Ban Ve C&iMạnh CườngNo ratings yet
- Analysis III: Measure and Integration Theory of Several Variables (Lecture Notes) - Peter PhilipDocument201 pagesAnalysis III: Measure and Integration Theory of Several Variables (Lecture Notes) - Peter Philipvic1234059No ratings yet
- Lab 4Document15 pagesLab 4Edwin JijoNo ratings yet
- Connection With Force: Gs. It Is Proportional To The ReactionDocument7 pagesConnection With Force: Gs. It Is Proportional To The ReactionSumeet BhallaNo ratings yet
- Section 11 - Coils, Accessories, and Options: Signa Illustrated Parts List Ge Medical SystemsDocument121 pagesSection 11 - Coils, Accessories, and Options: Signa Illustrated Parts List Ge Medical SystemsClaudia MartinsNo ratings yet
- Action and Reaction: Newton'S Third Law.: Teacher: Telman Askeraliyev, MSC, ItalyDocument22 pagesAction and Reaction: Newton'S Third Law.: Teacher: Telman Askeraliyev, MSC, ItalyШунаси ХалиловNo ratings yet
- UgCS Integrated Systems - SENSYS MagDrone R3&R4Document6 pagesUgCS Integrated Systems - SENSYS MagDrone R3&R4ing.jmatiasNo ratings yet
- Slides Conduction in SolidDocument16 pagesSlides Conduction in SolidMuhammad Zain AzeemNo ratings yet
- Validation of Equipment: Validation of Tablet Compression (Machine)Document20 pagesValidation of Equipment: Validation of Tablet Compression (Machine)Navdeep ChaudharyNo ratings yet
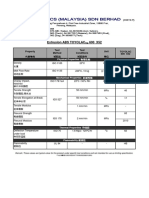
- Extrusion ABS TOYOLAC 600 X52: Toyolac 600 X52 试验法 试验条件 单位 Property Test Method Test Conditions UnitDocument1 pageExtrusion ABS TOYOLAC 600 X52: Toyolac 600 X52 试验法 试验条件 单位 Property Test Method Test Conditions UnitIndrajit SahaNo ratings yet
- Mechanicsfinalreport 120725010809 Phpapp02Document16 pagesMechanicsfinalreport 120725010809 Phpapp02Harith TsaqifNo ratings yet
- Yr11 TrigonometryDocument17 pagesYr11 Trigonometryamazingapple35No ratings yet
- Et EtDocument12 pagesEt EtVadivelanNo ratings yet
- Built in The Heavens CYOADocument24 pagesBuilt in The Heavens CYOAMatthew DixonNo ratings yet
- Translater Hal 76 - 77 (TysonDinges2009)Document4 pagesTranslater Hal 76 - 77 (TysonDinges2009)Dewi FithrianiNo ratings yet
- Electrical Resistivity of Membrane-Pavement SystemsDocument3 pagesElectrical Resistivity of Membrane-Pavement SystemsOsbaldo CalvarioNo ratings yet
- Bells and Alarm Circuit-1Document9 pagesBells and Alarm Circuit-1S MalinguNo ratings yet
- Light - Reflection and Refraction 1695198603046Document52 pagesLight - Reflection and Refraction 1695198603046TuikmcNo ratings yet
- CHAPTER 3 Real ChoiceDocument9 pagesCHAPTER 3 Real ChoiceMarvin Hervias CasiboNo ratings yet
- Circuit BreakerDocument15 pagesCircuit BreakerviputheshNo ratings yet
- 4 Lecture-6Document45 pages4 Lecture-620pwciv5477No ratings yet
- FAAC 746 Chain and Rack and Pinion Gate OperatorsDocument17 pagesFAAC 746 Chain and Rack and Pinion Gate OperatorsRobert MolloyNo ratings yet
- Chem DefinitionDocument7 pagesChem DefinitionS3CH-14 Choy Pak MingNo ratings yet
- Siemens Mammomat 300 1000 3000 3000 Nova Installation Instructions - Bus InstallationDocument8 pagesSiemens Mammomat 300 1000 3000 3000 Nova Installation Instructions - Bus InstallationOusama DawalibiNo ratings yet
- Simultaneous Heat and Mass Transfer (SHMT) : CHE-402 Date: 18/12/2018Document20 pagesSimultaneous Heat and Mass Transfer (SHMT) : CHE-402 Date: 18/12/2018Hussain AliNo ratings yet