Download as pdf or txt
You might also like
- P. C. Sen - Principles of Electric Machines 2edDocument634 pagesP. C. Sen - Principles of Electric Machines 2edwilliancsm100% (1)
- TheoryDocument4 pagesTheoryVibhor MittalNo ratings yet
- Module 6 Inverter 5-Level Switching Topology - NotesDocument25 pagesModule 6 Inverter 5-Level Switching Topology - NotesSuvankar BhattacharyyaNo ratings yet
- 25-Feb-2020 11B Converter Fed and Chopper Fed DC DrivesDocument16 pages25-Feb-2020 11B Converter Fed and Chopper Fed DC DrivesATULYA ALOK 17BEE0065No ratings yet
- Three Phase DC To Ac InverterDocument44 pagesThree Phase DC To Ac Inverternoor deen100% (1)
- Multilevel InvertersDocument13 pagesMultilevel Inverterssyfullahnel100% (1)
- Injection of EMF in Rotor Circuit PDFDocument5 pagesInjection of EMF in Rotor Circuit PDFkhidirtay50% (2)
- Motor PDFDocument9 pagesMotor PDFAbhishek SurinNo ratings yet
- Power Electronics Book Part 2 PDFDocument379 pagesPower Electronics Book Part 2 PDFHorch Mohamed50% (2)
- Chapter 07Document38 pagesChapter 07Umair Hassan100% (2)
- Three Phase InvertersDocument36 pagesThree Phase InvertersSrinivasRao100% (3)
- Unit - V InvertersDocument11 pagesUnit - V InvertersSukhpal SinghNo ratings yet
- Expt. 9 Single Phase Bridge Inverter: Aim of The ExperimentDocument8 pagesExpt. 9 Single Phase Bridge Inverter: Aim of The ExperimentUtpanna HotaNo ratings yet
- High Voltage DC Transmission 2: Inverters. The Term Converter Is Used To GenericallyDocument25 pagesHigh Voltage DC Transmission 2: Inverters. The Term Converter Is Used To GenericallyadnanNo ratings yet
- Ntrol Induction Motors by AC Voltage Controllers: N Nmo R o L LDocument10 pagesNtrol Induction Motors by AC Voltage Controllers: N Nmo R o L Lbond jamesNo ratings yet
- Unit 05: Single Phase DC-AC Converter (Transistor Based)Document20 pagesUnit 05: Single Phase DC-AC Converter (Transistor Based)vaibhav bodkheNo ratings yet
- Power Electronics-16mDocument18 pagesPower Electronics-16m20EUEE053- MADHUBALAN.SNo ratings yet
- Seminar Report REVISEDDocument21 pagesSeminar Report REVISEDayash mohantyNo ratings yet
- Chopper Fed Drives Updated18-10-2021Document44 pagesChopper Fed Drives Updated18-10-2021Dr.K.Krishna VeniNo ratings yet
- Power Electronics and Machines I SEMESTER II /2023-2024: 1.invertersDocument5 pagesPower Electronics and Machines I SEMESTER II /2023-2024: 1.invertersbasharfarhanNo ratings yet
- Single Phase InverterDocument8 pagesSingle Phase InverterEasy EducationNo ratings yet
- IEC Exam 2023Document15 pagesIEC Exam 2023Phyo KoNo ratings yet
- Electrical Power and Energy Systems: K.S. Gayathri Devi, S. Arun, C. SreejaDocument10 pagesElectrical Power and Energy Systems: K.S. Gayathri Devi, S. Arun, C. Sreejadileepk1989No ratings yet
- POWER SUPPLY SYSTEM. ServicesDocument76 pagesPOWER SUPPLY SYSTEM. ServicesnwanabossNo ratings yet
- In Industrial ApplicationsDocument10 pagesIn Industrial ApplicationsEddy Santiago Neira SisaNo ratings yet
- High Voltage DCDocument11 pagesHigh Voltage DCshanbel ayayuNo ratings yet
- Main Circuit Power Electronic Topologies Applied To The Con-Trol of Rotating-Field MotorsDocument44 pagesMain Circuit Power Electronic Topologies Applied To The Con-Trol of Rotating-Field MotorsnysretNo ratings yet
- Basic Induction (AC) Motor OperationDocument5 pagesBasic Induction (AC) Motor OperationMathews IndiaNo ratings yet
- Alternating Current (Ac) Electrical MachineDocument18 pagesAlternating Current (Ac) Electrical MachineLaw Boon Khang TennarasuNo ratings yet
- Ee07lab Experiment AutotransformerDocument5 pagesEe07lab Experiment AutotransformerPido, Patricia LaineNo ratings yet
- SCR Half-Wave Rectifier ContDocument2 pagesSCR Half-Wave Rectifier ContArulBalaNo ratings yet
- AC DC ConvertersDocument11 pagesAC DC ConvertersMoon BorahNo ratings yet
- A New Five-Level Inverter System For An Induction Motor With Open-End WindingsDocument6 pagesA New Five-Level Inverter System For An Induction Motor With Open-End WindingsGanesh ChallaNo ratings yet
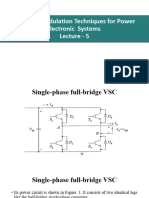
- Lecture 5 - Single Phase Full Bridge VSCDocument12 pagesLecture 5 - Single Phase Full Bridge VSCAfsal Abdul KarimNo ratings yet
- Lab 1 DJM 40103 Psim 2Document23 pagesLab 1 DJM 40103 Psim 2aiman.haziq2913No ratings yet
- Linear Voltage Differential Transformer-LVDT Transducers, WorkingDocument3 pagesLinear Voltage Differential Transformer-LVDT Transducers, WorkingBilal Mobeen100% (1)
- Non-Isolated Bidirectional Zero-Voltage Switching DC-DC Converter by Gopal PrasadDocument7 pagesNon-Isolated Bidirectional Zero-Voltage Switching DC-DC Converter by Gopal PrasadGopal Prasad BansalNo ratings yet
- Chapter 8 - Electrical, Starting, and Ignition SystemsDocument213 pagesChapter 8 - Electrical, Starting, and Ignition SystemsKim RioverosNo ratings yet
- Unit 2 - ED - 2ND PARTDocument21 pagesUnit 2 - ED - 2ND PARTMohit L.E. 008No ratings yet
- A Five-Level Inverter Voltage Space Phasor Generation For An Open-End Winding Induction Motor DriveDocument7 pagesA Five-Level Inverter Voltage Space Phasor Generation For An Open-End Winding Induction Motor DriveGanesh ChallaNo ratings yet
- A Comparison of Voltage-Mode Soft-Switching Methods For PWM ConvertersDocument10 pagesA Comparison of Voltage-Mode Soft-Switching Methods For PWM ConvertersAshish BhardwajNo ratings yet
- Motor EletrikDocument6 pagesMotor EletrikAshok GuevaraNo ratings yet
- Vincoy, John Lloyd Single Phase TransformerDocument19 pagesVincoy, John Lloyd Single Phase TransformerVincoy JohnlloydNo ratings yet
- Project Report For Completion OF B. Tech. in Electrical EngineeringDocument57 pagesProject Report For Completion OF B. Tech. in Electrical EngineeringetasureshNo ratings yet
- Bi Directional Buck BoostDocument7 pagesBi Directional Buck BoostAndrewJohnsonJenssonNo ratings yet
- Six-Pulse BridgeDocument4 pagesSix-Pulse BridgeRAhul SinghNo ratings yet
- Classification of InvertersDocument36 pagesClassification of InvertersMohammad ShoebNo ratings yet
- A Nine-Level Inverter System For An Open-End Winding Induction Motor DriveDocument6 pagesA Nine-Level Inverter System For An Open-End Winding Induction Motor DriveGanesh ChallaNo ratings yet
- DC Shunt Motor Change DrictionDocument4 pagesDC Shunt Motor Change Drictionnved01No ratings yet
- BRIDGE FWR Class NotesDocument2 pagesBRIDGE FWR Class NotesRAJASHEKHARNo ratings yet
- Auto TransformerDocument40 pagesAuto TransformerAlok Kumar100% (2)
- DC Generator Ee301Document16 pagesDC Generator Ee301Fred S. RickNo ratings yet
- Unit I and IIDocument46 pagesUnit I and IIYg SonuNo ratings yet
- Capacitor ApplicationDocument2 pagesCapacitor ApplicationSat NorlandNo ratings yet
- Electrical SystemDocument42 pagesElectrical SystemSamiha Maysoon NooriaNo ratings yet
- Zero-Voltage and Zero-Current Switching FullDocument8 pagesZero-Voltage and Zero-Current Switching FullFrank GonzalezNo ratings yet
- Chapter-5 SlidesDocument50 pagesChapter-5 SlidesdfNo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- A New System of Alternating Current Motors and TransformersFrom EverandA New System of Alternating Current Motors and TransformersRating: 1 out of 5 stars1/5 (1)