Download as pdf or txt
You might also like
- Algorithms: Richard Johnsonbaugh Marcus SchaeferDocument5 pagesAlgorithms: Richard Johnsonbaugh Marcus SchaeferAfras Ahmad0% (2)
- CS236 Project 2: The Datalog ParserDocument3 pagesCS236 Project 2: The Datalog ParserJeff PrattNo ratings yet
- 03 DiscreteDynamicsDocument40 pages03 DiscreteDynamicsDedi Misael NababanNo ratings yet
- 03 DiscreteDynamicsDocument37 pages03 DiscreteDynamicsQuỳnh NguyễnNo ratings yet
- Fundamental Algorithms For System Modeling, Analysis, and OptimizationDocument13 pagesFundamental Algorithms For System Modeling, Analysis, and OptimizationHitesh KapuriyaNo ratings yet
- CSDDocument4 pagesCSDharryNo ratings yet
- AAS 05-230 Root Locus Analysis of Higher Order Repetitive ControlDocument20 pagesAAS 05-230 Root Locus Analysis of Higher Order Repetitive ControlAyman IsmailNo ratings yet
- 05 Chapter 03 LFSIMDocument97 pages05 Chapter 03 LFSIMarunathangamNo ratings yet
- ULS - From Ground Test Results:: Model Pile' MethodDocument3 pagesULS - From Ground Test Results:: Model Pile' MethodanhNo ratings yet
- Canonical Variate Analysis (CVA) For Closed-Loop IdentificationDocument17 pagesCanonical Variate Analysis (CVA) For Closed-Loop IdentificationGanesh Kumar ArumugamNo ratings yet
- 06 ExtendedAndTimedAutomataDocument22 pages06 ExtendedAndTimedAutomataywq885233326No ratings yet
- 07 Model CheckingDocument34 pages07 Model CheckingCheese2010No ratings yet
- Aim of The Experiment: System Identification of DC Motor Using Matlab/Labview. Equipments RequiredDocument10 pagesAim of The Experiment: System Identification of DC Motor Using Matlab/Labview. Equipments Requiredpriyatosh dashNo ratings yet
- 05 CompositionOfStateMachines OptDocument24 pages05 CompositionOfStateMachines OptFikri AlhuseinNo ratings yet
- Experiment List: SR - No - Experiments Date of Lab Conduct Date of Report SubmissionDocument12 pagesExperiment List: SR - No - Experiments Date of Lab Conduct Date of Report SubmissionNimra NoorNo ratings yet
- The Square-Root Unscented Kalman Filter For State and Parameter-EstimationDocument4 pagesThe Square-Root Unscented Kalman Filter For State and Parameter-EstimationROHIT SinghNo ratings yet
- Electrical EngineeringDocument4 pagesElectrical EngineeringSubhash YadavNo ratings yet
- Control: Hooman SamaniDocument43 pagesControl: Hooman SamaniGonzales PhanieNo ratings yet
- An Overview of Subspace Identification: S. Joe QinDocument12 pagesAn Overview of Subspace Identification: S. Joe QinGodofredoNo ratings yet
- Advanced ADA Lab Manual M-Tech VTUDocument25 pagesAdvanced ADA Lab Manual M-Tech VTUMallesh Kumar100% (1)
- 2004 - Menezes de Sequeira, Brandão, Albuquerque - Evaluation of License-Plate Location AlgorithmsDocument4 pages2004 - Menezes de Sequeira, Brandão, Albuquerque - Evaluation of License-Plate Location AlgorithmsManuel Menezes de SequeiraNo ratings yet
- Model 2 CONTROL SYSTEM QUESTIONDocument3 pagesModel 2 CONTROL SYSTEM QUESTIONramk1987No ratings yet
- State Observers (p751)Document6 pagesState Observers (p751)Abdullah Abu LehyahNo ratings yet
- FLab-08 EXP8Document8 pagesFLab-08 EXP8Carl Kevin CartijanoNo ratings yet
- Po (K) (K-: Note A AN Queuing THE The Arrival Rate THE RateDocument4 pagesPo (K) (K-: Note A AN Queuing THE The Arrival Rate THE RateManiraj VenkatramanNo ratings yet
- MATLAB and Simulink Modelling of A Full State Observer Controller of Armature Controlled and Field Controlled DC Motor Using State Space ApproachDocument8 pagesMATLAB and Simulink Modelling of A Full State Observer Controller of Armature Controlled and Field Controlled DC Motor Using State Space ApproachNitsuga PomeloréNo ratings yet
- 02a ModelingPhysicalDynamicsDocument21 pages02a ModelingPhysicalDynamicsQuỳnh NguyễnNo ratings yet
- Module 1Document39 pagesModule 1indrajvyadavNo ratings yet
- Control With Random Communication Delays Via A Discrete-Time Jump System ApproachDocument6 pagesControl With Random Communication Delays Via A Discrete-Time Jump System ApproachArshad AliNo ratings yet
- System Theory - Model ExamDocument2 pagesSystem Theory - Model ExamrajapandiyaNo ratings yet
- Kennedy2003 - Power-System-Harmonic-Analysis-Using-The-Kalman-FilterDocument6 pagesKennedy2003 - Power-System-Harmonic-Analysis-Using-The-Kalman-FilterhenriqueNo ratings yet
- Control System LabDocument2 pagesControl System LabVinodSainiNo ratings yet
- Control System Lab Manual 18EEL66Document70 pagesControl System Lab Manual 18EEL66ADARSH SHINDE100% (1)
- 21EC45T Control SystemDocument7 pages21EC45T Control SystemM.N.MD. FaheemNo ratings yet
- Ali Imtiaz 043 Psa LabsDocument129 pagesAli Imtiaz 043 Psa LabsAli ImtiazNo ratings yet
- Zam Kazam05Document47 pagesZam Kazam05Roger SenNo ratings yet
- Lyapunov-Based Design of Robust Output Feedback Controllers For Uncertain Electrical CircuitsDocument4 pagesLyapunov-Based Design of Robust Output Feedback Controllers For Uncertain Electrical CircuitsAndré Lima CitadinNo ratings yet
- Kalman ReportDocument24 pagesKalman Reportsameerfarooq420840No ratings yet
- Scheme - I Sample Question PaperDocument4 pagesScheme - I Sample Question PaperYogesh Chaudhari100% (1)
- Probabilistic Robot 2 101222080103 Phpapp01Document54 pagesProbabilistic Robot 2 101222080103 Phpapp01vpresenceNo ratings yet
- Monocular LasaerDocument5 pagesMonocular LasaerinnoodiraNo ratings yet
- Eru 2010 SLAM PaperDocument3 pagesEru 2010 SLAM PaperHasala DharmawardenaNo ratings yet
- Elk 24 2 14 1309 60 PDFDocument17 pagesElk 24 2 14 1309 60 PDFAndrew FongNo ratings yet
- An Efficient Ceiling View SLAM Using Relational Constraints Between LandmarksDocument11 pagesAn Efficient Ceiling View SLAM Using Relational Constraints Between LandmarksAurel GSNo ratings yet
- 21ee52 Lab Manual FinalDocument122 pages21ee52 Lab Manual Finalchandasudip331No ratings yet
- Dynamic Testing Methods of Deep FoundationsDocument52 pagesDynamic Testing Methods of Deep Foundationsgaur79No ratings yet
- Learning Assumptions For Compositional Verification: Abstract. Compositional Verification Is A Promising Approach To AdDocument16 pagesLearning Assumptions For Compositional Verification: Abstract. Compositional Verification Is A Promising Approach To AdwebktNo ratings yet
- Testability Measures SCOAP BushnellDocument33 pagesTestability Measures SCOAP Bushnellvijeta diwanNo ratings yet
- Black Box Testing ExamplesDocument9 pagesBlack Box Testing ExamplesMasud RannaNo ratings yet
- Knowledge K1 - Remembering K3 - Applying K5 - Evaluating Levels (KL) K2 - Understanding K4 - Analyzing K6 - Creating Course OutcomeDocument3 pagesKnowledge K1 - Remembering K3 - Applying K5 - Evaluating Levels (KL) K2 - Understanding K4 - Analyzing K6 - Creating Course Outcomedivine wolfNo ratings yet
- Artificial Potential FieldDocument6 pagesArtificial Potential FieldAlfian MaarifNo ratings yet
- Control-Systems Lab (080-096)Document17 pagesControl-Systems Lab (080-096)Gangula Praneeth ReddyNo ratings yet
- Controlabilidad y Observabilidad PDFDocument9 pagesControlabilidad y Observabilidad PDFLuis Hernan ToucedaNo ratings yet
- Controlabilidad y Observabilidad PDFDocument9 pagesControlabilidad y Observabilidad PDFLuis Hernan ToucedaNo ratings yet
- VanderMerwe SPKF ION AM 2004Document14 pagesVanderMerwe SPKF ION AM 2004Gabriel RibasNo ratings yet
- Acs AnmolDocument31 pagesAcs AnmolUnknownNo ratings yet
- USN Dayananda Sagar College of Engineering Department of Electronics & Instrumentation Engineering Continuous Internal Evaluation - IiiDocument2 pagesUSN Dayananda Sagar College of Engineering Department of Electronics & Instrumentation Engineering Continuous Internal Evaluation - Iiikrushnasamy subramaniyanNo ratings yet
- Probability and Statistics With Reliability, Queuing and Computer Science Applications: Chapter 1 IntroductionDocument67 pagesProbability and Statistics With Reliability, Queuing and Computer Science Applications: Chapter 1 IntroductionMonika KshNo ratings yet
- Robocentric Map Joining: Improving The Consistency of EKF-SLAMDocument9 pagesRobocentric Map Joining: Improving The Consistency of EKF-SLAMzurnamanNo ratings yet
- Ps Exp 1 PDFDocument6 pagesPs Exp 1 PDFrv_andeNo ratings yet
- Telemark University College Faculty of Technology: M.Sc. ProgrammeDocument41 pagesTelemark University College Faculty of Technology: M.Sc. ProgrammeSayed LezonNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- 221 MergedDocument54 pages221 Mergedareeb ahmadNo ratings yet
- Environment Toxicology and Risk Assessment: by Dr. Mukesh SharmaDocument28 pagesEnvironment Toxicology and Risk Assessment: by Dr. Mukesh Sharmaareeb ahmadNo ratings yet
- CE352T Marking Options (Responses) - ModifiedDocument10 pagesCE352T Marking Options (Responses) - Modifiedareeb ahmadNo ratings yet
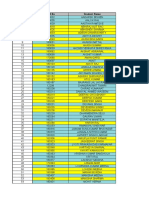
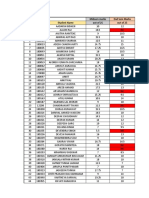
- Complete Marks ListDocument9 pagesComplete Marks Listareeb ahmadNo ratings yet
- Calculus and Its Applications 11th Edition Bittinger Test BankDocument211 pagesCalculus and Its Applications 11th Edition Bittinger Test BankAnthonyJacksonjpnxq100% (17)
- Mergesort NewDocument11 pagesMergesort NewBhupesh DhapolaNo ratings yet
- Xi Hy 2023 CS 18112023Document6 pagesXi Hy 2023 CS 18112023ghosalemon4509No ratings yet
- Quantitative Techniques in Management - Set TheoryDocument20 pagesQuantitative Techniques in Management - Set TheoryNitin ShindeNo ratings yet
- Truth Tables and Logical Equivalences ReviewDocument32 pagesTruth Tables and Logical Equivalences ReviewKelsey Nicole ArongNo ratings yet
- Progress On The Union-Closed Conjecture and Offsprings in Winter 2022-2023Document8 pagesProgress On The Union-Closed Conjecture and Offsprings in Winter 2022-2023marcelo majstrukNo ratings yet
- Jurna L2Document5 pagesJurna L2Zulqarami HMNo ratings yet
- 4-5. Mathematical Analysis of Recursive and NonRecursive TechniquesDocument59 pages4-5. Mathematical Analysis of Recursive and NonRecursive TechniquesIbrahimNo ratings yet
- Problemas Resueltos de Calculo IntegralDocument30 pagesProblemas Resueltos de Calculo IntegralSaulxito Cueva Santos Smc100% (1)
- LPP Example1Document4 pagesLPP Example1popaNo ratings yet
- Propositional LogicDocument26 pagesPropositional LogicAtheerNo ratings yet
- Chapter 2 Roots of EquationDocument20 pagesChapter 2 Roots of EquationDawit MengisteabNo ratings yet
- Discrete Mathematics cs6105Document109 pagesDiscrete Mathematics cs6105Denzel Ivan PalatinoNo ratings yet
- Devlin - The Joy of SetsDocument205 pagesDevlin - The Joy of SetsRaúl Ibáñez CouohNo ratings yet
- CSE 473 Autumn 2012: Midterm Exam SOLUTIONS: Do Not Start Until You Are Given The "Go-Ahead Signal"Document12 pagesCSE 473 Autumn 2012: Midterm Exam SOLUTIONS: Do Not Start Until You Are Given The "Go-Ahead Signal"Set ConfNo ratings yet
- Adobe Scan 22 May 2023Document17 pagesAdobe Scan 22 May 2023Youtube PremiumNo ratings yet
- Practice Questions 2Document13 pagesPractice Questions 2Prateek MehtaNo ratings yet
- Basic Structures Sets, Functions Sequences, and SumsDocument34 pagesBasic Structures Sets, Functions Sequences, and SumsVũ Thái AnhNo ratings yet
- TOC Unit 5 PDFDocument17 pagesTOC Unit 5 PDFKniturseNo ratings yet
- Combinatorial Optimization - Lecture 14 - TSPDocument37 pagesCombinatorial Optimization - Lecture 14 - TSPIoachim DipseNo ratings yet
- Properties of Context-Free Languages: Decision Properties Closure PropertiesDocument35 pagesProperties of Context-Free Languages: Decision Properties Closure PropertiesLalalalalalaNo ratings yet
- CSE 322 Introduction To Formal Models in Computer Science: ASE ASEDocument1 pageCSE 322 Introduction To Formal Models in Computer Science: ASE ASEJuliana SandisNo ratings yet
- Tes2 Test2Document30 pagesTes2 Test2noudewatofawaz7No ratings yet
- Sets and Set Operation (Short)Document31 pagesSets and Set Operation (Short)Kirk Jamison0% (1)
- Basic Calculus Module 6Document14 pagesBasic Calculus Module 6John Aeron CastilloNo ratings yet
- Fundamental Algorithms For System Modeling, Analysis, and OptimizationDocument13 pagesFundamental Algorithms For System Modeling, Analysis, and OptimizationHitesh KapuriyaNo ratings yet
- Theory of Computation and Compiler Design: Module - 5Document12 pagesTheory of Computation and Compiler Design: Module - 5AdityaNo ratings yet
- hw1 SolnDocument7 pageshw1 SolnRudraraju Sai Vishnu VarmaNo ratings yet