Download as pdf or txt
You might also like
- Topology Without Tears - SolucionesDocument19 pagesTopology Without Tears - SolucionesDeskartes64% (11)
- Analysis of Pigafetta's ChronicleDocument1 pageAnalysis of Pigafetta's ChronicleMa Rhena Salomon Magdasoc93% (30)
- Diagnostic Imagistic Obstetrica Ed.3Document17 pagesDiagnostic Imagistic Obstetrica Ed.3Ada100% (1)
- Simple Subject and Simple PredicateDocument2 pagesSimple Subject and Simple PredicateRonnaliza CorpinNo ratings yet
- ENVIRONMENTAL ACTIVITIES PP1 & 2 (Ii) PDFDocument86 pagesENVIRONMENTAL ACTIVITIES PP1 & 2 (Ii) PDFLois100% (1)
- Canada Visa Questionnaire (Tourist OR Business)Document3 pagesCanada Visa Questionnaire (Tourist OR Business)vishaltailor03143No ratings yet
- Sylvester's CriterionDocument4 pagesSylvester's CriterionTumpal EdisonNo ratings yet
- Differential Equations 4: Phy310 - Mathematical Methods For Physicists IDocument7 pagesDifferential Equations 4: Phy310 - Mathematical Methods For Physicists IPakeeza SharafatNo ratings yet
- 1 Lie Groups: 1.1 The General Linear GroupDocument13 pages1 Lie Groups: 1.1 The General Linear GroupmarioasensicollantesNo ratings yet
- Perturbación Del Radio Numérico Q de Un Operador de Desplazamiento PonderadoDocument10 pagesPerturbación Del Radio Numérico Q de Un Operador de Desplazamiento PonderadoRolly Cadillo PomaNo ratings yet
- Lecture 4.9. Positive Definite and Semidefinite Forms: April 10, 2020Document8 pagesLecture 4.9. Positive Definite and Semidefinite Forms: April 10, 2020bakra bundiNo ratings yet
- Annaby 2005Document24 pagesAnnaby 2005AndreNo ratings yet
- Ch.8 Linear AlgebraDocument16 pagesCh.8 Linear AlgebraHưng Đoàn VănNo ratings yet
- Solutions To Problem Set 7: FeedbackDocument6 pagesSolutions To Problem Set 7: FeedbackRobinson Ortega MezaNo ratings yet
- On Series With Alternating Signs in The Euclidean Metric: Real Analysis Exchange Vol., , Pp. 599-616Document18 pagesOn Series With Alternating Signs in The Euclidean Metric: Real Analysis Exchange Vol., , Pp. 599-616Daniel ManylNo ratings yet
- CH 6Document16 pagesCH 6tareqkh1No ratings yet
- Gauss Jacobi ProofDocument5 pagesGauss Jacobi Proofmat20d002No ratings yet
- Jordan Normal Form: 8.1 Minimal PolynomialsDocument17 pagesJordan Normal Form: 8.1 Minimal PolynomialsMin-Chun WuNo ratings yet
- Cayley Hamilton TheoremDocument5 pagesCayley Hamilton TheoremManjusha SharmaNo ratings yet
- A Proof of The Sylvester Criterion For Quadratic Forms Via Optimality Conditions For Quadratic FunctionsDocument5 pagesA Proof of The Sylvester Criterion For Quadratic Forms Via Optimality Conditions For Quadratic FunctionsMuneeb SafiNo ratings yet
- Algebraic Methods in Data Science: Lesson 3: Dan GarberDocument14 pagesAlgebraic Methods in Data Science: Lesson 3: Dan Garberrany khirbawyNo ratings yet
- PII - Numerical Analysis II - Iserles (2005) 61pg PDFDocument61 pagesPII - Numerical Analysis II - Iserles (2005) 61pg PDFfdsdsfsdfmgNo ratings yet
- Math480/540, TOPICS IN MODERN MATH. What Are Numbers?Document41 pagesMath480/540, TOPICS IN MODERN MATH. What Are Numbers?Jv lovenNo ratings yet
- The Eigenvalue Shift Technique and Its Eigenstructure Analysis of A MatrixDocument21 pagesThe Eigenvalue Shift Technique and Its Eigenstructure Analysis of A MatrixAl_catrazNo ratings yet
- Workshop10 SolutionsDocument2 pagesWorkshop10 SolutionsforspamreceivalNo ratings yet
- MTLIDocument101 pagesMTLIAsk Bulls BearNo ratings yet
- Optimization Techniques 1. Least SquaresDocument17 pagesOptimization Techniques 1. Least SquaresKhalil UllahNo ratings yet
- 1.8 Similarity Transformations 15Document15 pages1.8 Similarity Transformations 15Mae RohNo ratings yet
- Properties of The Singular Value Decomposition: Preliminary DefinitionsDocument24 pagesProperties of The Singular Value Decomposition: Preliminary Definitionsnorwenda triNo ratings yet
- Lecture7 D2 PDFDocument25 pagesLecture7 D2 PDFParitosh GuptaNo ratings yet
- Matrix CalculusDocument9 pagesMatrix CalculusWmleaoNo ratings yet
- Mathematical Tripos Part IADocument7 pagesMathematical Tripos Part IAChristopher HitchensNo ratings yet
- Handout 5 Elements of Conic Linear ProgrammingDocument12 pagesHandout 5 Elements of Conic Linear Programminglu huangNo ratings yet
- Eigenvalue Problem: 4.1 MathematicsDocument26 pagesEigenvalue Problem: 4.1 Mathematicssree2728No ratings yet
- Math 784: Algebraic NUMBER THEORYDocument70 pagesMath 784: Algebraic NUMBER THEORYMohamed AtiaNo ratings yet
- Filaseta M. - Algebraic Number Theory (Math 784) (1996)Document70 pagesFilaseta M. - Algebraic Number Theory (Math 784) (1996)Melania BerindeaNo ratings yet
- Nptel CN MathsDocument32 pagesNptel CN MathsAnurag SharmaNo ratings yet
- Autovalores Izquierdos para Una Matriz 2x2articuloDocument7 pagesAutovalores Izquierdos para Una Matriz 2x2articuloLuz Karime Castro RodriguezNo ratings yet
- EC400 Micro CoursepackDocument56 pagesEC400 Micro Coursepack돔양꿍No ratings yet
- EC400 HandoutDocument57 pagesEC400 Handoutc9bj9bvr5dNo ratings yet
- Gershgorin GSC PDFDocument118 pagesGershgorin GSC PDFHasnain HaiderNo ratings yet
- Polynomial Identities: Christian KasselDocument40 pagesPolynomial Identities: Christian KasselmichaelNo ratings yet
- Math 110: Linear Algebra Homework #10 Problem (1) - Use Induction On The Dimension N of A To Prove That Det (A Xi) Is A PolyDocument4 pagesMath 110: Linear Algebra Homework #10 Problem (1) - Use Induction On The Dimension N of A To Prove That Det (A Xi) Is A PolyCody SageNo ratings yet
- MIT6 436JF08 Rec09Document9 pagesMIT6 436JF08 Rec09jarod_kyleNo ratings yet
- ProblemsDocument62 pagesProblemserad_5No ratings yet
- Eigenvalues and Eigenvectors: 6.1 MotivationDocument14 pagesEigenvalues and Eigenvectors: 6.1 MotivationIsaac AsareNo ratings yet
- ConvexDocument63 pagesConvexVipul RanjanNo ratings yet
- I ConvergenceDocument18 pagesI ConvergenceshivaniNo ratings yet
- Differentiation MITDocument134 pagesDifferentiation MITRahul AgrawalNo ratings yet
- Mathematical Tripos: at The End of The ExaminationDocument27 pagesMathematical Tripos: at The End of The ExaminationDedliNo ratings yet
- Shifts of Finite TypeDocument5 pagesShifts of Finite TypeLuiz RicardoNo ratings yet
- Linear Algebra Via Complex Analysis: Alexander P. Campbell Daniel Daners Corrected Version January 24, 2014Document17 pagesLinear Algebra Via Complex Analysis: Alexander P. Campbell Daniel Daners Corrected Version January 24, 2014IgorBorodinNo ratings yet
- MMA320 Introduction To Algebraic Geometry Jan Stevens Matematik G Oteborgs UniversitetDocument71 pagesMMA320 Introduction To Algebraic Geometry Jan Stevens Matematik G Oteborgs UniversitethalcemailNo ratings yet
- Subsets, Graph Coloring, Hamiltonian Cycles, Knapsack Problem. Traveling Salesperson ProblemDocument22 pagesSubsets, Graph Coloring, Hamiltonian Cycles, Knapsack Problem. Traveling Salesperson ProblemKaarletNo ratings yet
- On Partial Sums in Cyclic GroupsDocument16 pagesOn Partial Sums in Cyclic GroupsJesús RosalesNo ratings yet
- Eigenvalue EigenvectorDocument69 pagesEigenvalue EigenvectordibyodibakarNo ratings yet
- ProductDocument16 pagesProductHiGrill25No ratings yet
- Stat331-Multiple Linear RegressionDocument13 pagesStat331-Multiple Linear RegressionSamantha YuNo ratings yet
- Spectral Theory: Kevin JamesDocument14 pagesSpectral Theory: Kevin JamesGustavo G Borzellino CNo ratings yet
- Non-Trivial Solutions To A Linear Equation in Integers: Boris BukhDocument5 pagesNon-Trivial Solutions To A Linear Equation in Integers: Boris BukhMani Shankar RajanNo ratings yet
- Cohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)From EverandCohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Critique of BoasDocument23 pagesCritique of BoasspermacetiNo ratings yet
- A Critical Review of Technology Acceptance Literature - Long Li PHDDocument20 pagesA Critical Review of Technology Acceptance Literature - Long Li PHDnovriadi_dharmasrayaNo ratings yet
- Data Collection of SubjectsDocument42 pagesData Collection of SubjectspahirathanNo ratings yet
- M11GM I B 4Document2 pagesM11GM I B 4Gemark D. Gebone100% (2)
- Philippine TVET SystemDocument64 pagesPhilippine TVET SystemRay Nan50% (2)
- JSymes Teaching ResumeDocument2 pagesJSymes Teaching Resumesymes_jessNo ratings yet
- Cách viết bài luận tiếng anhDocument2 pagesCách viết bài luận tiếng anhxuyenduong00No ratings yet
- ENGL1101 Wohlsen Digital LiteracyDocument4 pagesENGL1101 Wohlsen Digital LiteracyYoukkat SamiNo ratings yet
- Learning Standards For New York StateDocument3 pagesLearning Standards For New York StateSusana DalmaoNo ratings yet
- English DLP FormatDocument2 pagesEnglish DLP FormatPaula ParkNo ratings yet
- Propiedades de Las CurvasDocument260 pagesPropiedades de Las CurvasFabio Calle MattosNo ratings yet
- FULL Download Ebook PDF Human Exceptionality School Community and Family 12th Edition PDF EbookDocument42 pagesFULL Download Ebook PDF Human Exceptionality School Community and Family 12th Edition PDF Ebookarthur.mattingly873100% (45)
- International Journal of Intercultural RelationsDocument13 pagesInternational Journal of Intercultural RelationsHiroshi RománNo ratings yet
- DLJŞDocument479 pagesDLJŞDuygu YorganciNo ratings yet
- Sample Resume Format - Summers 2013Document2 pagesSample Resume Format - Summers 2013siddhant sethiaNo ratings yet
- Action Plan Mathematics 2016-2017Document6 pagesAction Plan Mathematics 2016-2017Jana Kayla de Guzman88% (25)
- Lesson Plan MCHSDocument4 pagesLesson Plan MCHSHanah Abegail NavaltaNo ratings yet
- Teen Parenting Brochure AssignmentDocument1 pageTeen Parenting Brochure AssignmentJayricDepalobosNo ratings yet
- Maine AWDS Full Evidence Report 13july20Document123 pagesMaine AWDS Full Evidence Report 13july20NEWS CENTER MaineNo ratings yet
- Mini SurveyDocument21 pagesMini SurveyAdlanRamlyNo ratings yet
- Job VacancyDocument10 pagesJob VacancyYuke DjuliantiNo ratings yet
- Meatless DaysDocument14 pagesMeatless Daysazmat.pti.ikNo ratings yet
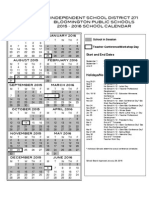
- 2015-2016 ApprovedDocument1 page2015-2016 Approvedapi-258129161No ratings yet
- Management Essay 1 (LAKSHYA 2)Document5 pagesManagement Essay 1 (LAKSHYA 2)AnjewGSNo ratings yet
- Unit 5 Test: NameDocument2 pagesUnit 5 Test: NameXeniaNo ratings yet