Download as pdf or txt
You might also like
- Robotics & Automation in Construction IndustryDocument43 pagesRobotics & Automation in Construction IndustryAbuzar Khan100% (8)
- Design and Implementation of Cartesian RobotDocument6 pagesDesign and Implementation of Cartesian RobotSang VũNo ratings yet
- Axe RobotDocument6 pagesAxe RobotJhonatan Alexander Becerra DuitamaNo ratings yet
- V6i5 1358Document6 pagesV6i5 1358Ritesh RajNo ratings yet
- Harshit Robotics 10Document13 pagesHarshit Robotics 10harshitkargathara21No ratings yet
- Round A Bot DR3 PresentationDocument52 pagesRound A Bot DR3 Presentationkimdl5No ratings yet
- Kinematic Simulation of Staubli TX40 Robot-ICMDocument6 pagesKinematic Simulation of Staubli TX40 Robot-ICMRicardo GuerreroNo ratings yet
- Robotic ArmDocument23 pagesRobotic ArmJapnam SodhiNo ratings yet
- MOTUS Open Source 3D Printed Robotic ArmDocument34 pagesMOTUS Open Source 3D Printed Robotic ArmTF Escritório MGNo ratings yet
- Design and 3D Print of An Explorer RobotDocument11 pagesDesign and 3D Print of An Explorer RobotAnonymous LO5DSEUNo ratings yet
- 1902 03547 PDFDocument8 pages1902 03547 PDFDipak KumarNo ratings yet
- RoboTurk Team DescriptionDocument12 pagesRoboTurk Team DescriptionkfuScribdNo ratings yet
- MOTUS Open Source 3D Printed Robotic ArmDocument35 pagesMOTUS Open Source 3D Printed Robotic Armاقْرَأْ وَرَبُّكَ الْأَكْرَمُNo ratings yet
- COBEM01 BDocument7 pagesCOBEM01 BEduarda SchwarzNo ratings yet
- Abstract. This Paper Describes MRL Small Size Soccer Team Activities in MeDocument8 pagesAbstract. This Paper Describes MRL Small Size Soccer Team Activities in MeAli AzkNo ratings yet
- SLG Brochure enDocument8 pagesSLG Brochure enMoustaffaNo ratings yet
- High Precision Linear Slide. Part I: Design and ConstructionDocument13 pagesHigh Precision Linear Slide. Part I: Design and ConstructionhamidrezamohamadzadeNo ratings yet
- Development of CMU Direct-Drive Arm IIDocument24 pagesDevelopment of CMU Direct-Drive Arm IIjain1912praveenNo ratings yet
- Application of A Mathematical Model For The Motoman MH-50 Industrial Robot's Electric Drive SystemDocument7 pagesApplication of A Mathematical Model For The Motoman MH-50 Industrial Robot's Electric Drive SystemIAES International Journal of Robotics and AutomationNo ratings yet
- Position Control of 3-DOF Articulated Robot Arm Using PID ControllerDocument7 pagesPosition Control of 3-DOF Articulated Robot Arm Using PID ControllerJoker JkNo ratings yet
- Dyadic Mechatronics Cylinder CatalogDocument16 pagesDyadic Mechatronics Cylinder CatalogElectromateNo ratings yet
- Application of Robot in Construction: Mallikarjuna 1ms11mcm09Document17 pagesApplication of Robot in Construction: Mallikarjuna 1ms11mcm09Bhanu Tej100% (1)
- 7 TransformadorDocument27 pages7 TransformadorMarkovic Ávila MartínezNo ratings yet
- CMC Brushless Servo Motor 2011 CatalogDocument4 pagesCMC Brushless Servo Motor 2011 CatalogElectromateNo ratings yet
- Micro MouseDocument6 pagesMicro MouseCaPeJoselitoNo ratings yet
- Etdp Tigers Mannheim 2018Document12 pagesEtdp Tigers Mannheim 2018ChefiaNo ratings yet
- Contactless Controlled Low-Cost Robotic System: Srđan A. MilojevićDocument5 pagesContactless Controlled Low-Cost Robotic System: Srđan A. Milojevićdao trong nghiaNo ratings yet
- Marcin SZAREK, Gözde ÖZCAN (Biped Robot)Document13 pagesMarcin SZAREK, Gözde ÖZCAN (Biped Robot)Mspavan RaoNo ratings yet
- Design of Arena Robot Based On STM32 ControlDocument8 pagesDesign of Arena Robot Based On STM32 Controltranluongminhgianga1No ratings yet
- Design and Fabrication of A CNC Router Machine For Wood EngravingDocument7 pagesDesign and Fabrication of A CNC Router Machine For Wood EngravingHaitham Mohammad0% (1)
- Design Implementation and Control of A H PDFDocument11 pagesDesign Implementation and Control of A H PDFNikhil HasabiNo ratings yet
- Scope:: Last and First Name: Student IdDocument4 pagesScope:: Last and First Name: Student Idb7663664No ratings yet
- Department of Mechanical EngineeringDocument17 pagesDepartment of Mechanical EngineeringDev AgarwalNo ratings yet
- BLDC Motor 2Document6 pagesBLDC Motor 2MOHAN RAJ NNo ratings yet
- Fabrication of Computerized Pipeline Inspection RobotDocument35 pagesFabrication of Computerized Pipeline Inspection RobotprojectzfourNo ratings yet
- Robotics and Embedded Systems Sig 1: Basics & Mechanical BotDocument30 pagesRobotics and Embedded Systems Sig 1: Basics & Mechanical BotAryan MittalNo ratings yet
- Chapter 2 SolutionDocument4 pagesChapter 2 SolutionEngr ShabirNo ratings yet
- Design of An Intelligent Fighter Robot For Technex RobowarDocument5 pagesDesign of An Intelligent Fighter Robot For Technex RobowarvarunNo ratings yet
- Robot Accuracy: Executive SummaryDocument36 pagesRobot Accuracy: Executive SummaryMerced HernandezNo ratings yet
- Design of An Intelligent Fighter Robot For Technex RobowarDocument5 pagesDesign of An Intelligent Fighter Robot For Technex RobowarvarunNo ratings yet
- Electric Vehicle For Traction MotorsDocument12 pagesElectric Vehicle For Traction Motorschetan_harsha_1100% (1)
- SUMO RobotDocument20 pagesSUMO RobotMatt's Santouz CchildNo ratings yet
- SIZER 0510 enDocument39 pagesSIZER 0510 enmamijato100% (1)
- ACW+ Description 601089 AutomationDocument8 pagesACW+ Description 601089 Automationsahrish farhaanNo ratings yet
- CMC Brushless Servo Motor 2011 CatalogDocument4 pagesCMC Brushless Servo Motor 2011 CatalogServo2GoNo ratings yet
- Project Presentation (CS499) - Albert MairaDocument30 pagesProject Presentation (CS499) - Albert Mairakingunge100% (1)
- WhatsNew CimatronE 9.0 Mold Design and ElectrodeDocument17 pagesWhatsNew CimatronE 9.0 Mold Design and ElectrodeVignesh WaranNo ratings yet
- 2020 TDP KgpKubsDocument16 pages2020 TDP KgpKubsMarcos FaleiroNo ratings yet
- Instructions: (I) Answer The TWO Questions Given (Ii) Question OneDocument4 pagesInstructions: (I) Answer The TWO Questions Given (Ii) Question OneCephas Mpandika KalemboNo ratings yet
- Automatic Metal Sheet Cutting MachineDocument2 pagesAutomatic Metal Sheet Cutting MachinekothandapaniNo ratings yet
- Chessbot - Final PaperDocument6 pagesChessbot - Final PaperSandeep KumarNo ratings yet
- A Football Kicking High Speed Actuator For A Mobile Robotic ApplicationDocument7 pagesA Football Kicking High Speed Actuator For A Mobile Robotic ApplicationMuhammad FadhilNo ratings yet
- Procedure Machine Tool Gear Box - 21Document8 pagesProcedure Machine Tool Gear Box - 21Prasad GhogareNo ratings yet
- 01 133202 017 11262480613 02112023 085615amDocument5 pages01 133202 017 11262480613 02112023 085615amAHSAN HAMEEDNo ratings yet
- Ironless Linear Motor - LMS Linear Motor ActuatorDocument20 pagesIronless Linear Motor - LMS Linear Motor ActuatorjuliangoalNo ratings yet
- Art:10.1007/s00170 007 1024 XDocument7 pagesArt:10.1007/s00170 007 1024 XMichael WareNo ratings yet
- Design and Implementation of Stair-Climbing Robot For Rescue ApplicationsDocument8 pagesDesign and Implementation of Stair-Climbing Robot For Rescue ApplicationsLee Shi HongNo ratings yet
- Design and Fabrication of A Fire Fighting Robot Using Aa 6063 Aluminum AlloyDocument4 pagesDesign and Fabrication of A Fire Fighting Robot Using Aa 6063 Aluminum Alloydhruvmaniya120No ratings yet
- Especificação Bomba de ÓleoDocument3 pagesEspecificação Bomba de ÓleoflavioNo ratings yet
- Practical, Made Easy Guide To Robotics & Automation [Revised Edition]From EverandPractical, Made Easy Guide To Robotics & Automation [Revised Edition]Rating: 1 out of 5 stars1/5 (1)
- The OscilloscopeDocument6 pagesThe OscilloscoperiverajluizNo ratings yet
- SSN 0002Document4 pagesSSN 0002Fareed KhanNo ratings yet
- 06 - Simple Method For Predicting A Cable Shielding Factor Based On Transfer Impedance 1000%Document5 pages06 - Simple Method For Predicting A Cable Shielding Factor Based On Transfer Impedance 1000%Caio SilvaNo ratings yet
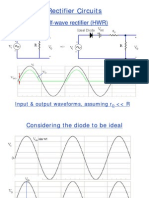
- Rectifier Circuits: Half-Wave Rectifier (HWR)Document18 pagesRectifier Circuits: Half-Wave Rectifier (HWR)Md ArifNo ratings yet
- Datasheet Centaur Charger ENDocument2 pagesDatasheet Centaur Charger ENVladimirNo ratings yet
- NCERT Solutions For Class 12 Physics Chapter 1 Electric Charges and FieldsDocument28 pagesNCERT Solutions For Class 12 Physics Chapter 1 Electric Charges and FieldsYash Pratap SinghNo ratings yet
- American National Standard Requirements For Cylindricalrotor SynDocument21 pagesAmerican National Standard Requirements For Cylindricalrotor SynDiego RamosNo ratings yet
- Electricneutron-Star Delta Motor ConnectionDocument7 pagesElectricneutron-Star Delta Motor ConnectionJoe ElectricneutronNo ratings yet
- Otc 25704 MS PDFDocument9 pagesOtc 25704 MS PDFObi MogboNo ratings yet
- Capacitor BankDocument28 pagesCapacitor BankPrakash Rout100% (1)
- Eee 306Document19 pagesEee 306সামিন জাওয়াদNo ratings yet
- Utp and Fiber CablingDocument17 pagesUtp and Fiber CablingRedjie Redz MigallosNo ratings yet
- AA36-100 Tie Line Adapter - UnlockedDocument30 pagesAA36-100 Tie Line Adapter - UnlockedGeeNo ratings yet
- Xyce Reference GuideDocument634 pagesXyce Reference GuideVojislav MedićNo ratings yet
- ASSIGN6Document5 pagesASSIGN6Binod AdhikariNo ratings yet
- Milim EBG PowerResistors VHPDocument2 pagesMilim EBG PowerResistors VHPTrio HamdaniNo ratings yet
- Why Impulse TestDocument2 pagesWhy Impulse TestGaurav AgarwalNo ratings yet
- GTR-205 Generator Controller Manual: Web SiteDocument24 pagesGTR-205 Generator Controller Manual: Web SiterianartoNo ratings yet
- Marathon Motors Price List 2021Document22 pagesMarathon Motors Price List 2021Mohan BabuNo ratings yet
- The Series Inductance-Capacitance (L-C) CircuitDocument7 pagesThe Series Inductance-Capacitance (L-C) Circuitzed coz100% (1)
- ALADDDDocument4 pagesALADDDJohnallenSyNo ratings yet
- R18B Tech EEESyllabusDocument3 pagesR18B Tech EEESyllabussaiNo ratings yet
- Electronics Art Belajar RobotDocument421 pagesElectronics Art Belajar RobotAMRE SYAMSUDINNo ratings yet
- 739489Document2 pages739489Francesco CristofaroNo ratings yet
- Techfine MPPT DatasheetDocument1 pageTechfine MPPT DatasheetpeterNo ratings yet
- PWR PicoUPS 100 ManualDocument4 pagesPWR PicoUPS 100 ManualApriadiNo ratings yet
- Interference PDFDocument4 pagesInterference PDFmoeen.tariq9252100% (1)
- Technical Description and Specification-3Document4 pagesTechnical Description and Specification-3api-396886008No ratings yet
- JBL SRX898Document16 pagesJBL SRX898Muhammad IrvandaNo ratings yet
- Measurement of NoiseDocument20 pagesMeasurement of NoiseRoland CepedaNo ratings yet



























































![Practical, Made Easy Guide To Robotics & Automation [Revised Edition]](https://imgv2-2-f.scribdassets.com/img/word_document/253466853/149x198/4281882d40/1709916831?v=1)