Download as pdf or txt
You might also like
- 38t GEI41047 PDocument28 pages38t GEI41047 PJorge DiazNo ratings yet
- Problem Set 1: 2.29 / 2.290 Numerical Fluid Mechanics - Spring 2021Document7 pagesProblem Set 1: 2.29 / 2.290 Numerical Fluid Mechanics - Spring 2021Aman JalanNo ratings yet
- SP18 CS182 Midterm Solutions - EditedDocument14 pagesSP18 CS182 Midterm Solutions - EditedHasimNo ratings yet
- ML5Document5 pagesML5Anonymous C5ACgu0No ratings yet
- Strahlenfolter Stalking - TI - V2K - RNM Remote Neural Monitoring Satellite Terrorism - October 2010 - Satelliteterrorism3.Blogspot - deDocument5 pagesStrahlenfolter Stalking - TI - V2K - RNM Remote Neural Monitoring Satellite Terrorism - October 2010 - Satelliteterrorism3.Blogspot - deKurt-Schneider50% (2)
- ECE/CS 584: Embedded and Cyberphysical System VerificationDocument2 pagesECE/CS 584: Embedded and Cyberphysical System VerificationTitofunmi OyewoleNo ratings yet
- SOLUTIONS : Midterm Exam For Simulation (CAP 4800)Document14 pagesSOLUTIONS : Midterm Exam For Simulation (CAP 4800)Amit DostNo ratings yet
- Due: July 22: Mini Project IV ME373Document3 pagesDue: July 22: Mini Project IV ME373usama666No ratings yet
- TT XXDocument5 pagesTT XXAsees SachdevNo ratings yet
- Midterm1 Complex Physics 2022Document2 pagesMidterm1 Complex Physics 2022Yi DaiNo ratings yet
- Problem Set 2Document3 pagesProblem Set 2Kareem Tarek Abou El ReeshNo ratings yet
- Project 1Document7 pagesProject 1KikazeNo ratings yet
- EE4307: Control System Design and Simulation Project AssignmentDocument3 pagesEE4307: Control System Design and Simulation Project AssignmentdanielNo ratings yet
- Problem Set 3: Notes: Please Provide A Hard-Copy (Handwritten/printed) of Your Solutions. Please Do Not Print Your CodesDocument5 pagesProblem Set 3: Notes: Please Provide A Hard-Copy (Handwritten/printed) of Your Solutions. Please Do Not Print Your CodesAman JalanNo ratings yet
- 2005 Take Home MidtermDocument2 pages2005 Take Home MidtermSigan ChenNo ratings yet
- ME730A - Modal Analysis: Theory and PracticeDocument5 pagesME730A - Modal Analysis: Theory and PracticePankaj KumarNo ratings yet
- Harmonic Oscillator in MathematicaDocument13 pagesHarmonic Oscillator in Mathematicabaraib7tyNo ratings yet
- Homework 9 - CEE 511 - F19Document23 pagesHomework 9 - CEE 511 - F19John ShottkeyNo ratings yet
- Interference and DiffractionDocument16 pagesInterference and DiffractionmumtazaliNo ratings yet
- Mathematics and Algorithms For Computer Algebra: ExaminationDocument3 pagesMathematics and Algorithms For Computer Algebra: ExaminationAnis SouissiNo ratings yet
- Final 2006Document15 pagesFinal 2006유홍승No ratings yet
- UCS415 - EST - Final With SolutionsDocument16 pagesUCS415 - EST - Final With SolutionsSiddharth JindalNo ratings yet
- CSE565 F10 Midterm1Document14 pagesCSE565 F10 Midterm1h_liang93No ratings yet
- AssignmentsDocument10 pagesAssignmentsDQZNo ratings yet
- Part A: Texas A&M University MEEN 683 Multidisciplinary System Design Optimization (MSADO) Spring 2021 Assignment 2Document5 pagesPart A: Texas A&M University MEEN 683 Multidisciplinary System Design Optimization (MSADO) Spring 2021 Assignment 2BobaNo ratings yet
- Midterm SolutionDocument11 pagesMidterm Solutionfrozenfire310803No ratings yet
- Project #1: Homogenization in Linear ElasticityDocument2 pagesProject #1: Homogenization in Linear ElasticitySuraj JayswalNo ratings yet
- X y Uniformly in The Shaded Region Shown.: EE 503 Homework #2 (Due: Dec. 7, 2012)Document1 pageX y Uniformly in The Shaded Region Shown.: EE 503 Homework #2 (Due: Dec. 7, 2012)Mesut AtasoyNo ratings yet
- Neural Networks (2010/11) Example Exam, December 2010Document2 pagesNeural Networks (2010/11) Example Exam, December 2010Ali EzzatNo ratings yet
- 103 ExercisesDocument70 pages103 Exerciseshungbkpro90No ratings yet
- Thi Giac May Tinh - Vo Quang Hoang Khang - Ex6 (Cuuduongthancong - Com)Document3 pagesThi Giac May Tinh - Vo Quang Hoang Khang - Ex6 (Cuuduongthancong - Com)Tiến Anh NguyễnNo ratings yet
- Ex09 1 SolDocument8 pagesEx09 1 SolmuguchialioNo ratings yet
- Project C: Dr. Shahin Tavakoli Applied Bayesian Statistics Project 1Document2 pagesProject C: Dr. Shahin Tavakoli Applied Bayesian Statistics Project 1方鑫然No ratings yet
- Answer Key 18CSC305J AI CT II QP ODD III EDocument9 pagesAnswer Key 18CSC305J AI CT II QP ODD III EmashsolosofficialNo ratings yet
- Cs230exam Spr18 Soln PDFDocument45 pagesCs230exam Spr18 Soln PDFMOHAMMAD100% (1)
- Exam 2020Document9 pagesExam 2020Aavesh DagarNo ratings yet
- Mock Question SamplesDocument3 pagesMock Question SamplesMUHAMMAD AHADNo ratings yet
- Ee610 hw2 Au23Document3 pagesEe610 hw2 Au23Manish kumawatNo ratings yet
- DSP Final TT July2021Document2 pagesDSP Final TT July2021Phươc Vương HoàngNo ratings yet
- Self Assessment IDPDocument12 pagesSelf Assessment IDPaniketbhuniaNo ratings yet
- EndsemDocument3 pagesEndsemfirebase appsNo ratings yet
- SESA6061 Coursework2 2019Document8 pagesSESA6061 Coursework2 2019Giulio MarkNo ratings yet
- GPU Programming EE 4702-1 Take-Home Pre-Final ExaminationDocument11 pagesGPU Programming EE 4702-1 Take-Home Pre-Final ExaminationmoienNo ratings yet
- HST.582J / 6.555J / 16.456J Biomedical Signal and Image ProcessingDocument3 pagesHST.582J / 6.555J / 16.456J Biomedical Signal and Image ProcessingShafayet UddinNo ratings yet
- Basu-Fem Notes Me623Document210 pagesBasu-Fem Notes Me623Subhradeep ChatterjeeNo ratings yet
- Final 2006Document15 pagesFinal 2006Muhammad MurtazaNo ratings yet
- 319 - MECE-001 - ENG D18 - Compressed PDFDocument3 pages319 - MECE-001 - ENG D18 - Compressed PDFShubham ChoudharyNo ratings yet
- MATH2071: LAB 1 (B) : Using Matlab ODE SolversDocument10 pagesMATH2071: LAB 1 (B) : Using Matlab ODE SolversRajasekhar AnguluriNo ratings yet
- Ass 1Document3 pagesAss 1Vibhanshu LodhiNo ratings yet
- Lab 2Document3 pagesLab 2Disen LiangNo ratings yet
- CSE 373 Sample Final Exam: Instructions Read The Directions For Each Question Carefully Before Answering. We MayDocument12 pagesCSE 373 Sample Final Exam: Instructions Read The Directions For Each Question Carefully Before Answering. We MayDeadly ChillerNo ratings yet
- CS130 WriteupDocument4 pagesCS130 WriteupisshewhoevenNo ratings yet
- Potential Assignment MCEN90008 2016Document9 pagesPotential Assignment MCEN90008 2016Umar AshrafNo ratings yet
- Machine Learning NotesDocument67 pagesMachine Learning NotesAndreaNo ratings yet
- Final PracticeDocument68 pagesFinal PracticekhawirNo ratings yet
- Solution of The Developed Homogenous &Non-Homogenous Wave Equation Using MathematicaDocument11 pagesSolution of The Developed Homogenous &Non-Homogenous Wave Equation Using MathematicaAhmed HussainNo ratings yet
- Image Processing QuestionsDocument4 pagesImage Processing QuestionsabhinavNo ratings yet
- Exam Advanced Linear Programming, May 14, 13.30-16.30Document4 pagesExam Advanced Linear Programming, May 14, 13.30-16.30tequesta95No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Practical Finite Element Modeling in Earth Science using MatlabFrom EverandPractical Finite Element Modeling in Earth Science using MatlabNo ratings yet
- Line Drawing Algorithm: Mastering Techniques for Precision Image RenderingFrom EverandLine Drawing Algorithm: Mastering Techniques for Precision Image RenderingNo ratings yet
- Merga CertificateDocument2 pagesMerga CertificateTolichoNo ratings yet
- Internship ReportDocument24 pagesInternship ReportTolicho100% (1)
- PMECE LastedDocument63 pagesPMECE LastedTolichoNo ratings yet
- PM EceDocument4 pagesPM EceTolichoNo ratings yet
- Database Project Documentation by Tole Fikadu Aga, 2022Document13 pagesDatabase Project Documentation by Tole Fikadu Aga, 2022TolichoNo ratings yet
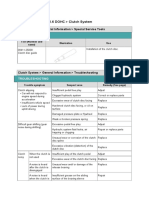
- 06.clutch SystemDocument24 pages06.clutch SystemTony D'AngeloNo ratings yet
- Color TheoryDocument4 pagesColor TheoryJoshua OdonioNo ratings yet
- UG RA 005 - Thermal Integrity and Resistivity TestingDocument6 pagesUG RA 005 - Thermal Integrity and Resistivity TestingshamshuddinNo ratings yet
- Lesson 3 - Verb Tense and ModalsDocument24 pagesLesson 3 - Verb Tense and ModalsmNo ratings yet
- 320 Lecture 27Document8 pages320 Lecture 27Gathy BrayohNo ratings yet
- Module 2 (People and The Earth's Ecosystem)Document11 pagesModule 2 (People and The Earth's Ecosystem)chris ian0% (2)
- Asus T12C (X51C) Motherboard Schematic DiagramDocument94 pagesAsus T12C (X51C) Motherboard Schematic DiagramYblis100% (1)
- PVC Pressure Pipes and Fittings Catalogue (Pannon Pipe)Document8 pagesPVC Pressure Pipes and Fittings Catalogue (Pannon Pipe)vuthy prakNo ratings yet
- REGION 11 FinalDocument61 pagesREGION 11 FinalRo Lai Yah BerbañoNo ratings yet
- Soal Bahasa Inggris Kelas Xii Semua JurusanDocument13 pagesSoal Bahasa Inggris Kelas Xii Semua Jurusaneka sanjayaNo ratings yet
- Travel Tourism in Bangladesh: A Study On Regent Tours & TravelDocument72 pagesTravel Tourism in Bangladesh: A Study On Regent Tours & TravelNahidNo ratings yet
- Tools and Service Items: A/C Can TapsDocument15 pagesTools and Service Items: A/C Can Tapshome businessNo ratings yet
- Quinone-Based Molecular Electrochemistry and Their Contributions To Medicinal Chemistry: A Look at The Present and FutureDocument9 pagesQuinone-Based Molecular Electrochemistry and Their Contributions To Medicinal Chemistry: A Look at The Present and FutureSanti Osorio DiezNo ratings yet
- Cryolite JM File 2011Document5 pagesCryolite JM File 2011mutemuNo ratings yet
- Food Menu TemplateDocument14 pagesFood Menu TemplateG- WizNo ratings yet
- RFIDDocument18 pagesRFIDKulavardan ThalapulaNo ratings yet
- Lynx SpecificationsDocument2 pagesLynx Specificationsengine wangNo ratings yet
- 635 BrainwritingDocument8 pages635 BrainwritingTran TrungNo ratings yet
- Ignition Loss of Cured Reinforced Resins: Standard Test Method ForDocument3 pagesIgnition Loss of Cured Reinforced Resins: Standard Test Method ForElida SanchezNo ratings yet
- BS Soil and Rock Explanatory NotesDocument15 pagesBS Soil and Rock Explanatory NotesvictorNo ratings yet
- BLOBITECTUREDocument23 pagesBLOBITECTURESonal TarkasbandNo ratings yet
- Eurocode Conference 2023 Pluijm Van Der Eurocode 6Document14 pagesEurocode Conference 2023 Pluijm Van Der Eurocode 6Rodolfo BlanchiettiNo ratings yet
- Fan Heater - B-011 - Data SheetsDocument9 pagesFan Heater - B-011 - Data SheetsNadim Ahmad SiddiqueNo ratings yet
- Analisis Potensi Dan Tingkat Pemanfaatan Sumberdaya Ikan Di Perairan Kabupaten Bangka SelatanDocument12 pagesAnalisis Potensi Dan Tingkat Pemanfaatan Sumberdaya Ikan Di Perairan Kabupaten Bangka SelatanShope IkmaNo ratings yet
- Real Time Road Sign Recognition System For Autonomous CarDocument14 pagesReal Time Road Sign Recognition System For Autonomous CarVipul MistryNo ratings yet
- Soal Latihan US Bahasa InggrisDocument5 pagesSoal Latihan US Bahasa Inggrispikri18120No ratings yet
- Allersin Syrup/ F Tablet: Amended Package InsertDocument1 pageAllersin Syrup/ F Tablet: Amended Package Insertraul sinatoNo ratings yet
- Agile ManufacturingDocument17 pagesAgile Manufacturingkaushalsingh20No ratings yet