Download as pdf or txt
You might also like
- DataStage Advanced Parallel GuideDocument899 pagesDataStage Advanced Parallel GuideSagarNo ratings yet
- Sensor Data Fusion Using Kalman Filter: August 2000Document8 pagesSensor Data Fusion Using Kalman Filter: August 2000pruebaNo ratings yet
- Digital H Robust Control of Mechanical System With Implicit ObserverDocument6 pagesDigital H Robust Control of Mechanical System With Implicit ObserverGuilherme HenriqueNo ratings yet
- Simulation of Ow Meter Calibration Factors For Various Installation EffectsDocument11 pagesSimulation of Ow Meter Calibration Factors For Various Installation Effectstagne simo rodrigueNo ratings yet
- Simplified Parameter Identification For Circular Tunnels: 2.1 Back Analysis Using The Convergence-Confinement MethodDocument6 pagesSimplified Parameter Identification For Circular Tunnels: 2.1 Back Analysis Using The Convergence-Confinement MethodHaha ZazaNo ratings yet
- 2014 22 Khamis Naidu NonlinearOptimalTracking Proceedingsofthe2014ACCPortlandOregonpp.2420 2425june2014Document7 pages2014 22 Khamis Naidu NonlinearOptimalTracking Proceedingsofthe2014ACCPortlandOregonpp.2420 2425june2014Nesibe Nur ÇamNo ratings yet
- Kal1 PDFDocument6 pagesKal1 PDFOuafo Mandela BrelNo ratings yet
- GCCDocument14 pagesGCCAlif Bayu WindrawanNo ratings yet
- Design of A Random Decrement Method Based Structural Health Monitoring SystemDocument9 pagesDesign of A Random Decrement Method Based Structural Health Monitoring SystemLake HouseNo ratings yet
- 2008 A State-Space Approach For Deriving Bridge Displacement From Acceleration-Gindy-Vaccaro-Nassif-CACIEDocument11 pages2008 A State-Space Approach For Deriving Bridge Displacement From Acceleration-Gindy-Vaccaro-Nassif-CACIEBridge&StructureNo ratings yet
- Discrete Wavelet Transform Using Circular ConvolutionDocument6 pagesDiscrete Wavelet Transform Using Circular ConvolutionijsretNo ratings yet
- A Low-Cost Vehicle Detection and Classification System Based On Unmodulated Continuous-Wave RadarDocument6 pagesA Low-Cost Vehicle Detection and Classification System Based On Unmodulated Continuous-Wave RadarMuhammad Hamdi100% (1)
- Angular Motion Estimation Using Dynamic ModelsDocument18 pagesAngular Motion Estimation Using Dynamic ModelssumathyNo ratings yet
- Tdma Based Sensor Network For Military ApplicationsDocument7 pagesTdma Based Sensor Network For Military ApplicationslambanaveenNo ratings yet
- Guidance Law Evaluation For Missile Guidance Systems: Chih-Min Lin, Chun-Fei Hsu, Shing-Kuo Chang and Rong-Jong WaiDocument8 pagesGuidance Law Evaluation For Missile Guidance Systems: Chih-Min Lin, Chun-Fei Hsu, Shing-Kuo Chang and Rong-Jong WaiyosefNo ratings yet
- Kfvsexp Final LaviolaDocument8 pagesKfvsexp Final LaviolaMila ApriliyantiNo ratings yet
- Implementation of Resonant Controllers and Filters in Fixed-Point ArithmeticDocument9 pagesImplementation of Resonant Controllers and Filters in Fixed-Point Arithmeticmipanduro7224No ratings yet
- Doppler Spread Estimation in Mobile Communication Systems: Young-Chai Gibong JeongDocument5 pagesDoppler Spread Estimation in Mobile Communication Systems: Young-Chai Gibong Jeong82416149No ratings yet
- Sensors: On The Testing of Advanced Automotive Radar Sensors by Means of Target SimulatorsDocument22 pagesSensors: On The Testing of Advanced Automotive Radar Sensors by Means of Target SimulatorsJovannico AbdullahNo ratings yet
- Franklin Note 2Document21 pagesFranklin Note 2WylieNo ratings yet
- Research Article: Channel Impulse Response Estimation in IEEE 802.11p Via Data Fusion and MMSE EstimatorDocument11 pagesResearch Article: Channel Impulse Response Estimation in IEEE 802.11p Via Data Fusion and MMSE EstimatorGabriel SantosNo ratings yet
- Adaptive Application of Impedance Estimation Algorithms in Distance RelayingDocument6 pagesAdaptive Application of Impedance Estimation Algorithms in Distance Relayingsirisiri100No ratings yet
- Are You in SYNC?: Rapid Evaluation of Telecom Network Synchronization Quality To Itu-T/Etsi StandardsDocument15 pagesAre You in SYNC?: Rapid Evaluation of Telecom Network Synchronization Quality To Itu-T/Etsi StandardsCarlos SalazarNo ratings yet
- Ref 19Document11 pagesRef 19Sandeep SunkariNo ratings yet
- SKF Final DocumentationDocument80 pagesSKF Final DocumentationDeepkar ReddyNo ratings yet
- 13 15 MMD IEEE ITSDocument11 pages13 15 MMD IEEE ITSGULLAPALLI MANASA ee16b015No ratings yet
- Sensors-Fpga ProjectDocument24 pagesSensors-Fpga ProjectangelinaNo ratings yet
- Driving Cycle Tracking Device Development and Analysis On Route-To-Work For Kuala Terengganu CityDocument7 pagesDriving Cycle Tracking Device Development and Analysis On Route-To-Work For Kuala Terengganu CityTELKOMNIKANo ratings yet
- Smart-Aloha For Multi-Hop Wireless NetworksDocument13 pagesSmart-Aloha For Multi-Hop Wireless NetworksMohana GaneshanNo ratings yet
- Ntegration of The General Network Theorem in ADE and ADE XL: Toward A Deeper Insight Into Circuit BehaviorDocument6 pagesNtegration of The General Network Theorem in ADE and ADE XL: Toward A Deeper Insight Into Circuit BehaviorosewoudtNo ratings yet
- Adaptive Cruise Control Acc Full ReportDocument22 pagesAdaptive Cruise Control Acc Full ReportdadasariNo ratings yet
- Pathan-Memon2020 Article AnalyzingTheImpactOfSigma-DeltDocument11 pagesPathan-Memon2020 Article AnalyzingTheImpactOfSigma-DeltShiv Ram MeenaNo ratings yet
- TechnicalReview1977 1Document34 pagesTechnicalReview1977 1mastelecentroNo ratings yet
- Adaptive Cruise Control (Acc)Document19 pagesAdaptive Cruise Control (Acc)Shivendra KumarNo ratings yet
- Automotive Radar Target Tracking by Kalman FilteringDocument4 pagesAutomotive Radar Target Tracking by Kalman FilteringAndreiNo ratings yet
- Eltoukhy Salama ReportDocument22 pagesEltoukhy Salama ReportSaeideh OraeiNo ratings yet
- Teager Kaiser FilterDocument4 pagesTeager Kaiser FilterCristian CarrilloNo ratings yet
- Vijaynandu ModifiedDocument15 pagesVijaynandu ModifiedReddy SumanthNo ratings yet
- Sensorless Vector Control of Induction Motor Using Artificial Neural NetworkDocument4 pagesSensorless Vector Control of Induction Motor Using Artificial Neural NetworkKarthik BalajiNo ratings yet
- Control New1Document18 pagesControl New1MAAZ KHANNo ratings yet
- Simple Technique For Root Locus PlottingDocument9 pagesSimple Technique For Root Locus PlottingHernández VaNo ratings yet
- Digital Control: Fundamentals: ENGI 7825: Control Systems II Andrew VardyDocument32 pagesDigital Control: Fundamentals: ENGI 7825: Control Systems II Andrew VardyZhraa NorNo ratings yet
- J Matcom 2011 07 010Document11 pagesJ Matcom 2011 07 010Bá Linh NguyễnNo ratings yet
- Report - Adaptive BeamformingDocument20 pagesReport - Adaptive Beamformingskh4nedNo ratings yet
- Extended Gradient Predictor and Filter For Smoothing RSSI: Fazli Subhan, Salman Ahmed and Khalid AshrafDocument5 pagesExtended Gradient Predictor and Filter For Smoothing RSSI: Fazli Subhan, Salman Ahmed and Khalid Ashrafthap_dinhNo ratings yet
- C019 ObserverControllerRobot 4thIASTED ICRM96 HonoluluDocument6 pagesC019 ObserverControllerRobot 4thIASTED ICRM96 HonoluluCostanzo ManesNo ratings yet
- A Robust Extended Filter Design For SDINS Inflight AlignmentDocument7 pagesA Robust Extended Filter Design For SDINS Inflight AlignmentSalman MajeedNo ratings yet
- Robust Computer Control An Inverted Pendulum: Medrano-CerdaDocument10 pagesRobust Computer Control An Inverted Pendulum: Medrano-CerdaVictor PassosNo ratings yet
- 10.1007@978 981 15 2780 7 Pages 974 983Document10 pages10.1007@978 981 15 2780 7 Pages 974 983Nguyễn Đình PhúcNo ratings yet
- Sensors 23 00326 v2Document28 pagesSensors 23 00326 v2yajun huaNo ratings yet
- T DriveDocument28 pagesT DriveMeenachi SundaramNo ratings yet
- Network LayerDocument208 pagesNetwork LayerKalpana PalNo ratings yet
- Sensors: A Real-Time Smart Sensor For High-Resolution Frequency Estimation in Power SystemsDocument18 pagesSensors: A Real-Time Smart Sensor For High-Resolution Frequency Estimation in Power SystemsgreybNo ratings yet
- A Sensor Fusion Algorithm For Cooperative LocalizationDocument8 pagesA Sensor Fusion Algorithm For Cooperative LocalizationVijaya YajnanarayanaNo ratings yet
- Modified Linear Quadratic Bumpless TransferDocument5 pagesModified Linear Quadratic Bumpless Transferlie jamesNo ratings yet
- 020 Propagation Path-Loss Model For TV White Space of KoreaDocument6 pages020 Propagation Path-Loss Model For TV White Space of Koreaeuler.amNo ratings yet
- Autonomous Vehicle Driving Using The Stream Based Realtime Hardware Line DetectorDocument4 pagesAutonomous Vehicle Driving Using The Stream Based Realtime Hardware Line DetectorLoi NgoNo ratings yet
- Analytical Validation of An IMT-Advanced Compliant LTE System Level SimulatorDocument5 pagesAnalytical Validation of An IMT-Advanced Compliant LTE System Level SimulatorkaviarasanNo ratings yet
- System Model FormulationDocument10 pagesSystem Model FormulationlucyNo ratings yet
- Design of Intelligent Braking System: February 2000Document7 pagesDesign of Intelligent Braking System: February 2000Nihal RajNo ratings yet
- Adaptive Filter: Enhancing Computer Vision Through Adaptive FilteringFrom EverandAdaptive Filter: Enhancing Computer Vision Through Adaptive FilteringNo ratings yet
- Radio Frequency and Wireless CommunicationsDocument12 pagesRadio Frequency and Wireless CommunicationsLaxman AryalNo ratings yet
- GSM - THC WikiDocument33 pagesGSM - THC Wikiapi-26400509No ratings yet
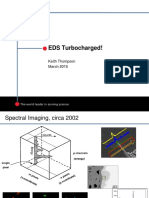
- EDS Turbocharged!: Keith Thompson March 2015Document25 pagesEDS Turbocharged!: Keith Thompson March 2015Dana OanaNo ratings yet
- Immitance InverterDocument4 pagesImmitance Inverteramitgh88No ratings yet
- Microfreak Manual 5 0 0 ENDocument155 pagesMicrofreak Manual 5 0 0 ENDan Castellanos GallegosNo ratings yet
- TraceDocument9 pagesTracemitekNo ratings yet
- 2 MarksDocument2 pages2 MarksEzhilya VenkatNo ratings yet
- Design of A Substrate Integrated WaveguideDocument3 pagesDesign of A Substrate Integrated WaveguideAlgerian AissaouiNo ratings yet
- Courses-Graduate 2020 ECEDocument7 pagesCourses-Graduate 2020 ECEZisheng LiuNo ratings yet
- Signals and Systems Using Matlab Chapter 7 - Fourier Analysis in Communications and FilteringDocument21 pagesSignals and Systems Using Matlab Chapter 7 - Fourier Analysis in Communications and FilteringDiluNo ratings yet
- (Texas) Silicon ErrataDocument25 pages(Texas) Silicon ErrataJuan UcNo ratings yet
- ME - 316 - CH - 3 - V4 Part2 NYDocument38 pagesME - 316 - CH - 3 - V4 Part2 NYxxxNo ratings yet
- Digital Communication Using GNU Radio - Unit 3 - Week 0Document3 pagesDigital Communication Using GNU Radio - Unit 3 - Week 0rensiNo ratings yet
- TI - FilterPro Low-Pass Design ToolDocument6 pagesTI - FilterPro Low-Pass Design ToolmbenhebiNo ratings yet
- User's Guide: Omega Usb SoftwareDocument32 pagesUser's Guide: Omega Usb SoftwareJunior Francisco QuijanoNo ratings yet
- Digital Communication MCQ Sanfoundry PDFDocument210 pagesDigital Communication MCQ Sanfoundry PDFRakesh VenkatesanNo ratings yet
- Motion At005 - en PDocument112 pagesMotion At005 - en PNelsonNo ratings yet
- N6QW Homebrewing-For-Qrp-Ssb-Homebrew-Qrp-AndDocument24 pagesN6QW Homebrewing-For-Qrp-Ssb-Homebrew-Qrp-AndEngaf Procurement100% (1)
- Hearing Aids System For Impaired Peoples: January 2004Document5 pagesHearing Aids System For Impaired Peoples: January 2004Anvitha LokepalliNo ratings yet
- Basic Electronics Engineering Interview Questions & Answers PDFDocument1 pageBasic Electronics Engineering Interview Questions & Answers PDFSatyam ShivanshNo ratings yet
- ICOM IC-756 PRO2 Service Manual PDFDocument105 pagesICOM IC-756 PRO2 Service Manual PDFDavid NybergNo ratings yet
- TELKOMNIKA Journal PaperDocument9 pagesTELKOMNIKA Journal PaperBlmjdb AbdelhafidNo ratings yet
- SwitchCap UnderstandingDocument28 pagesSwitchCap UnderstandingRajeev JainNo ratings yet
- Frequency Domain Filtering (Chapter 4) : CS474/674 - Prof. BebisDocument53 pagesFrequency Domain Filtering (Chapter 4) : CS474/674 - Prof. Bebisneoronic17100% (1)
- EEG Digital ProcessingDocument10 pagesEEG Digital ProcessingyosbanisNo ratings yet
- Fuji Servo System: MEH555cDocument8 pagesFuji Servo System: MEH555csunhuynhNo ratings yet
- Cue 3X380500V Ip55 90KWDocument5 pagesCue 3X380500V Ip55 90KWMohamed Abdulrahman IbrahimNo ratings yet
- ML2036 DataSheet PDFDocument13 pagesML2036 DataSheet PDFAhmed M H Al-YousifNo ratings yet