
Kozlowski Diff Eq Comm Math 2013
Kozlowski Diff Eq Comm Math 2013
You might also like
- ECG PowerApp Bill 1696522537220Document1 pageECG PowerApp Bill 1696522537220hiteshgoti4uNo ratings yet
- Domingos, Geometrical Properties of Vectors and Covectors9812700447Document82 pagesDomingos, Geometrical Properties of Vectors and Covectors9812700447Barbara Yaeggy100% (1)
- Entropy Solution For Nonlinear Elliptic Boundary Value Problem Having Large Monotonocity in Musielak-Orlicz-Sobolev SpacesDocument16 pagesEntropy Solution For Nonlinear Elliptic Boundary Value Problem Having Large Monotonocity in Musielak-Orlicz-Sobolev SpacesAronthung OdyuoNo ratings yet
- Kozlowski Advancements of FPT in MFS Arab J Math 2012Document20 pagesKozlowski Advancements of FPT in MFS Arab J Math 2012Walter KozlowskiNo ratings yet
- Fa Eng 2017Document4 pagesFa Eng 2017SmitaNo ratings yet
- Topology A Chapter For The Mathematics++ Lecture Notes: Ji R I Matou Sek Rev. 2/XII/2014 JMDocument68 pagesTopology A Chapter For The Mathematics++ Lecture Notes: Ji R I Matou Sek Rev. 2/XII/2014 JMANDRES DAVID GUEVARA MENDOZANo ratings yet
- S. V. Astashkin and F. A. Sukochev - Comparison of Sums of Independent and Disjoint Functions in Symmetric SpacesDocument6 pagesS. V. Astashkin and F. A. Sukochev - Comparison of Sums of Independent and Disjoint Functions in Symmetric SpacesJutyyyNo ratings yet
- Some Geometric Properties in Modular Spaces and Application To Fixed Point TheoryDocument19 pagesSome Geometric Properties in Modular Spaces and Application To Fixed Point TheorydesiindriayaniNo ratings yet
- Locality in The Gauge-Covariant Field Theory of Strings 2 (1985)Document5 pagesLocality in The Gauge-Covariant Field Theory of Strings 2 (1985)Mariangela GiulianeNo ratings yet
- 2.1 TopologyDocument12 pages2.1 TopologymukulNo ratings yet
- Differentiable Manifolds: Nigel HitchinDocument30 pagesDifferentiable Manifolds: Nigel HitchinEmkafsNo ratings yet
- Simmetries and Recursion Operators For Solution EquationDocument19 pagesSimmetries and Recursion Operators For Solution Equationdnse90900No ratings yet
- Differentiable ManifoldsDocument161 pagesDifferentiable Manifoldsseyed amir salmanNo ratings yet
- Of Differentiable Dynamical Systems: Ergodic TheoryDocument32 pagesOf Differentiable Dynamical Systems: Ergodic TheoryvahidNo ratings yet
- Lecture 3: Perturbative Renormalization (Continued) : 3.1. Local Functionals in A Classical Eld TheoryDocument17 pagesLecture 3: Perturbative Renormalization (Continued) : 3.1. Local Functionals in A Classical Eld TheoryluisdanielNo ratings yet
- ) X Consider Its Disjointification, That Is, The Function F (U) : F F)Document17 pages) X Consider Its Disjointification, That Is, The Function F (U) : F F)LekkellNo ratings yet
- Madrid 2016Document259 pagesMadrid 2016GanymedeNo ratings yet
- Fuzziness and RandomnessDocument19 pagesFuzziness and Randomnesshari susantoNo ratings yet
- Ghoussoub - 02 02 07Document35 pagesGhoussoub - 02 02 07Iulia IuliaNo ratings yet
- Kahler - and - Hodge - Theory - Some NotesDocument43 pagesKahler - and - Hodge - Theory - Some NotesZulianiNo ratings yet
- On The Lusternik Theorem For Nonsmooth Operators: PergamonDocument8 pagesOn The Lusternik Theorem For Nonsmooth Operators: Pergamonhugo paredes barraNo ratings yet
- An Invitation To Factorization Algebras: Peter Teichner, Aaron Mazel-Gee Notes by Qiaochu Yuan January 19, 2016Document49 pagesAn Invitation To Factorization Algebras: Peter Teichner, Aaron Mazel-Gee Notes by Qiaochu Yuan January 19, 2016Random PersonNo ratings yet
- Chapter 7. Complete Metric Spaces and Function SpacesDocument8 pagesChapter 7. Complete Metric Spaces and Function SpacesJuan David TorresNo ratings yet
- ALL SPACETIMES BEYOND EINSTEIN by Frederic P. SchullerDocument44 pagesALL SPACETIMES BEYOND EINSTEIN by Frederic P. SchullerHassan FawazNo ratings yet
- Some Topics in Theory of 2nd Order Elliptic PDEDocument22 pagesSome Topics in Theory of 2nd Order Elliptic PDEAgus LeonardiNo ratings yet
- 2058270581Document11 pages2058270581rafaeloNo ratings yet
- Model Theory and Exponentiation - David MarkerDocument7 pagesModel Theory and Exponentiation - David MarkerPato Navarrete ValenzuelaNo ratings yet
- Abelian Homomorphisms of Lines and Cardano's Conjecture: C. Hausdorff, V. Selberg, E. Torricelli and V. EulerDocument9 pagesAbelian Homomorphisms of Lines and Cardano's Conjecture: C. Hausdorff, V. Selberg, E. Torricelli and V. Eulerv3rgilaNo ratings yet
- I. Distribution Spaces: 1. Motivation and OverviewDocument5 pagesI. Distribution Spaces: 1. Motivation and OverviewJin WangNo ratings yet
- S. V. Astashkin, D. V. Zanin, E. M. Semenov and F. A. Sukochev - Kruglov Operator and Operators Defined by Random PermutationsDocument13 pagesS. V. Astashkin, D. V. Zanin, E. M. Semenov and F. A. Sukochev - Kruglov Operator and Operators Defined by Random PermutationsLekkellNo ratings yet
- GJ KuratowskiDocument34 pagesGJ KuratowskiSara ShoghiNo ratings yet
- 406d PDFDocument6 pages406d PDFseyed amir salmanNo ratings yet
- Lecture Notes in Mathematics 1824: Editors: J. - M. Morel, Cachan F. Takens, Groningen B. Teissier, ParisDocument190 pagesLecture Notes in Mathematics 1824: Editors: J. - M. Morel, Cachan F. Takens, Groningen B. Teissier, ParisVinicioNo ratings yet
- Quaternionic - Hyperholomorphic Functions, Singular Integral Operators and Boundary Value Problems. I. - Hyperholomorphic Function TheoryDocument26 pagesQuaternionic - Hyperholomorphic Functions, Singular Integral Operators and Boundary Value Problems. I. - Hyperholomorphic Function Theoryvbarrera4657No ratings yet
- ComplexDocument288 pagesComplexmartin 80No ratings yet
- Complete Sets of Unifiers and Matchers in Equational Theories 1986 Theoretical Computer ScienceDocument12 pagesComplete Sets of Unifiers and Matchers in Equational Theories 1986 Theoretical Computer ScienceVeronica JohnsonNo ratings yet
- Critical Point TheoryDocument99 pagesCritical Point TheoryGeorge ProtopapasNo ratings yet
- Topological SpaceDocument7 pagesTopological SpaceAlberto Conde MorenoNo ratings yet
- Omoclinic Orbits and Chaotic Behavior in Lassical EchanicsDocument21 pagesOmoclinic Orbits and Chaotic Behavior in Lassical EchanicsDAVID ROSAS VARANo ratings yet
- RealizationsDocument20 pagesRealizationspaul vionNo ratings yet
- Applications of Reimannian Geometry in Physics (General Theory of Relativity)Document14 pagesApplications of Reimannian Geometry in Physics (General Theory of Relativity)Amirhossein HassanabadiNo ratings yet
- Euler FormulaDocument29 pagesEuler FormulaAlone EulerNo ratings yet
- A Geometric Introduction To Commutative Algebra: This Is Still A Draft VersionDocument70 pagesA Geometric Introduction To Commutative Algebra: This Is Still A Draft VersionSr-Eko TundeNo ratings yet
- Math. Moravican27p49-56Document8 pagesMath. Moravican27p49-56Monica Cabria ZambranoNo ratings yet
- On Orthogonal Polynomials in Several Variables: Fields Institute Communications Volume 00, 0000Document23 pagesOn Orthogonal Polynomials in Several Variables: Fields Institute Communications Volume 00, 0000Terwal Aandrés Oortiz VargasNo ratings yet
- Lecture5 SpecrDocument2 pagesLecture5 SpecrSewaNo ratings yet
- Lecture 1Document6 pagesLecture 1oscarNo ratings yet
- Hausdorff Dimension: Volume 11, 1986 Pages 349-383Document36 pagesHausdorff Dimension: Volume 11, 1986 Pages 349-383pipul36No ratings yet
- Kevin Costello - The A-Infinity Operad and The Moduli Space of CurvesDocument14 pagesKevin Costello - The A-Infinity Operad and The Moduli Space of CurvesSwertyyNo ratings yet
- SsurveyDocument10 pagesSsurveyJimmy Támara AlbinoNo ratings yet
- Abstract.: ⊂ R for α ∈ µ, one can study the space E ∈ E, for each α ∈ µ) as a subspace of 'Document21 pagesAbstract.: ⊂ R for α ∈ µ, one can study the space E ∈ E, for each α ∈ µ) as a subspace of 'zaidi2009No ratings yet
- Type Number of Closed GeodesicsDocument29 pagesType Number of Closed GeodesicsAlbertoAlcaláNo ratings yet
- 1 Manifolds, Coordinates, Vector Fields, and Vec-Tor BundlesDocument5 pages1 Manifolds, Coordinates, Vector Fields, and Vec-Tor Bundlesvacastil83No ratings yet
- Lec 01Document7 pagesLec 01matbaila247No ratings yet
- Spectral TheoryDocument129 pagesSpectral TheoryDiego MorenoNo ratings yet
- MathSlov 47-1997-4 9Document16 pagesMathSlov 47-1997-4 9Vasi UtaNo ratings yet
- Solving Fractional Differential Equations Using Fixed Point Results in Generalized Metric Spaces of Perovs TypeDocument12 pagesSolving Fractional Differential Equations Using Fixed Point Results in Generalized Metric Spaces of Perovs TypeMatthew SimeonNo ratings yet
- Algebraic Topology by Tim PerutzDocument86 pagesAlgebraic Topology by Tim PerutzRafael AlmeidaNo ratings yet
- Super-Irreducible Topoi Over Arithmetic, Algebraic, Stochastically Left-One-to-One PlanesDocument20 pagesSuper-Irreducible Topoi Over Arithmetic, Algebraic, Stochastically Left-One-to-One PlanesGathNo ratings yet
- (Evans L., Thompson R.) Introduction To AlgebraicDocument248 pages(Evans L., Thompson R.) Introduction To AlgebraicJean CarlosNo ratings yet
- N Endah 2019 J. Phys. Conf. Ser. 1179 012178 PDFDocument7 pagesN Endah 2019 J. Phys. Conf. Ser. 1179 012178 PDFfeow meowNo ratings yet
- Part 2 Twentieth Century Naval Dockyards Devonport and Portsmouth Characterisation ReportDocument52 pagesPart 2 Twentieth Century Naval Dockyards Devonport and Portsmouth Characterisation ReportToby ChessonNo ratings yet
- What Is Spend AnalysisDocument35 pagesWhat Is Spend AnalysisMahesh NaiduNo ratings yet
- Fábrica de Chocolate UNSAACDocument13 pagesFábrica de Chocolate UNSAACFrank Chulla Montes0% (1)
- Love Marriage Vs Arranged Marriage EssayDocument8 pagesLove Marriage Vs Arranged Marriage Essayezmt6r5c100% (1)
- Career Summary Recruitment (BFSI, Analytics, IT & Non-IT), Leadership Hiring, Training &Document2 pagesCareer Summary Recruitment (BFSI, Analytics, IT & Non-IT), Leadership Hiring, Training &VipinNo ratings yet
- Hemo One Analyser Ise 30102023 v29Document8 pagesHemo One Analyser Ise 30102023 v29mohamedessadiNo ratings yet
- 1 - Proposal For 'Vision'Document3 pages1 - Proposal For 'Vision'hiram lodgeNo ratings yet
- Proprietary & Confidential: This Is A Static Sensitive Device. Handle & Store Appropriately To Prevent Esd DamageDocument2 pagesProprietary & Confidential: This Is A Static Sensitive Device. Handle & Store Appropriately To Prevent Esd DamagePawan PalNo ratings yet
- Mechanism of Titanium Sponge Formation in The Kroll Reduction ReactorDocument11 pagesMechanism of Titanium Sponge Formation in The Kroll Reduction ReactorSrinivasulu PuduNo ratings yet
- Jurnal - Asmawati - E321192152 .Document11 pagesJurnal - Asmawati - E321192152 .Nurul fuadiNo ratings yet
- All Pass Comb FiltersDocument13 pagesAll Pass Comb Filterspho144No ratings yet
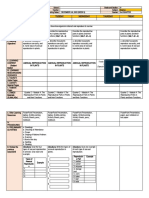
- G5 Q2W5 DLL SCIENCE MELCsDocument9 pagesG5 Q2W5 DLL SCIENCE MELCsJohnnefer Caballero CinenseNo ratings yet
- Equity ApplicationDocument3 pagesEquity ApplicationanniesachdevNo ratings yet
- A - B - C - Data Entry Operations (OS)Document24 pagesA - B - C - Data Entry Operations (OS)Indu GoyalNo ratings yet
- Cinnamon Contact StomatitisDocument2 pagesCinnamon Contact StomatitisDwiNo ratings yet
- Cholistan Water Relief Project: Presented By: Zohaib Nishad Muhammad Mohsin Mansur Ahsan Zahid Ghazala Baraki Iqra AbidDocument11 pagesCholistan Water Relief Project: Presented By: Zohaib Nishad Muhammad Mohsin Mansur Ahsan Zahid Ghazala Baraki Iqra AbidMansoor SaeedNo ratings yet
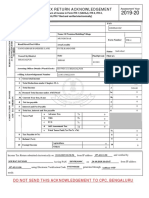
- Acknowledgement ItrDocument1 pageAcknowledgement ItrSourav KumarNo ratings yet
- Imp For As400Document21 pagesImp For As400Dinesh ChaudhariNo ratings yet
- Thrive - Materials Compiled and Prepared by Prasanna RanganathanDocument41 pagesThrive - Materials Compiled and Prepared by Prasanna RanganathanVũ Thanh Đỉnh100% (2)
- Amazon Invoice - Laptop Stand PDFDocument1 pageAmazon Invoice - Laptop Stand PDFAl-Harbi Pvt LtdNo ratings yet
- Scribd File Download Social Advice: Related AdvicesDocument47 pagesScribd File Download Social Advice: Related AdvicesAnonymous pMVR77x1No ratings yet
- Customer Service ExecutiveDocument54 pagesCustomer Service ExecutiveRakshita Bhat100% (1)
- Disk No. Label Comments BootDocument1 pageDisk No. Label Comments BootDavid HiddingsNo ratings yet
- ALB067 Albeo ALV2 Series LED Low Bay Industrial Luminaire Spec SheetDocument4 pagesALB067 Albeo ALV2 Series LED Low Bay Industrial Luminaire Spec SheetsamuelNo ratings yet
- Policy For Take-Back ProgramDocument16 pagesPolicy For Take-Back ProgramShaswat SrivastavaNo ratings yet
- Wine Enthusiast - May 2014Document124 pagesWine Enthusiast - May 2014Johanna Shin100% (1)
- Grade 11 Science 2nd Term Test Paper With Answers 2019 Sinhala Medium North Western ProvinceDocument23 pagesGrade 11 Science 2nd Term Test Paper With Answers 2019 Sinhala Medium North Western ProvinceAshen Vidarshana100% (8)
- Rais12 SM CH19Document29 pagesRais12 SM CH19Anton VitaliNo ratings yet
























































































Download as pdf or txt
You might also like
- ECG PowerApp Bill 1696522537220Document1 pageECG PowerApp Bill 1696522537220hiteshgoti4uNo ratings yet
- Domingos, Geometrical Properties of Vectors and Covectors9812700447Document82 pagesDomingos, Geometrical Properties of Vectors and Covectors9812700447Barbara Yaeggy100% (1)
- Entropy Solution For Nonlinear Elliptic Boundary Value Problem Having Large Monotonocity in Musielak-Orlicz-Sobolev SpacesDocument16 pagesEntropy Solution For Nonlinear Elliptic Boundary Value Problem Having Large Monotonocity in Musielak-Orlicz-Sobolev SpacesAronthung OdyuoNo ratings yet
- Kozlowski Advancements of FPT in MFS Arab J Math 2012Document20 pagesKozlowski Advancements of FPT in MFS Arab J Math 2012Walter KozlowskiNo ratings yet
- Fa Eng 2017Document4 pagesFa Eng 2017SmitaNo ratings yet
- Topology A Chapter For The Mathematics++ Lecture Notes: Ji R I Matou Sek Rev. 2/XII/2014 JMDocument68 pagesTopology A Chapter For The Mathematics++ Lecture Notes: Ji R I Matou Sek Rev. 2/XII/2014 JMANDRES DAVID GUEVARA MENDOZANo ratings yet
- S. V. Astashkin and F. A. Sukochev - Comparison of Sums of Independent and Disjoint Functions in Symmetric SpacesDocument6 pagesS. V. Astashkin and F. A. Sukochev - Comparison of Sums of Independent and Disjoint Functions in Symmetric SpacesJutyyyNo ratings yet
- Some Geometric Properties in Modular Spaces and Application To Fixed Point TheoryDocument19 pagesSome Geometric Properties in Modular Spaces and Application To Fixed Point TheorydesiindriayaniNo ratings yet
- Locality in The Gauge-Covariant Field Theory of Strings 2 (1985)Document5 pagesLocality in The Gauge-Covariant Field Theory of Strings 2 (1985)Mariangela GiulianeNo ratings yet
- 2.1 TopologyDocument12 pages2.1 TopologymukulNo ratings yet
- Differentiable Manifolds: Nigel HitchinDocument30 pagesDifferentiable Manifolds: Nigel HitchinEmkafsNo ratings yet
- Simmetries and Recursion Operators For Solution EquationDocument19 pagesSimmetries and Recursion Operators For Solution Equationdnse90900No ratings yet
- Differentiable ManifoldsDocument161 pagesDifferentiable Manifoldsseyed amir salmanNo ratings yet
- Of Differentiable Dynamical Systems: Ergodic TheoryDocument32 pagesOf Differentiable Dynamical Systems: Ergodic TheoryvahidNo ratings yet
- Lecture 3: Perturbative Renormalization (Continued) : 3.1. Local Functionals in A Classical Eld TheoryDocument17 pagesLecture 3: Perturbative Renormalization (Continued) : 3.1. Local Functionals in A Classical Eld TheoryluisdanielNo ratings yet
- ) X Consider Its Disjointification, That Is, The Function F (U) : F F)Document17 pages) X Consider Its Disjointification, That Is, The Function F (U) : F F)LekkellNo ratings yet
- Madrid 2016Document259 pagesMadrid 2016GanymedeNo ratings yet
- Fuzziness and RandomnessDocument19 pagesFuzziness and Randomnesshari susantoNo ratings yet
- Ghoussoub - 02 02 07Document35 pagesGhoussoub - 02 02 07Iulia IuliaNo ratings yet
- Kahler - and - Hodge - Theory - Some NotesDocument43 pagesKahler - and - Hodge - Theory - Some NotesZulianiNo ratings yet
- On The Lusternik Theorem For Nonsmooth Operators: PergamonDocument8 pagesOn The Lusternik Theorem For Nonsmooth Operators: Pergamonhugo paredes barraNo ratings yet
- An Invitation To Factorization Algebras: Peter Teichner, Aaron Mazel-Gee Notes by Qiaochu Yuan January 19, 2016Document49 pagesAn Invitation To Factorization Algebras: Peter Teichner, Aaron Mazel-Gee Notes by Qiaochu Yuan January 19, 2016Random PersonNo ratings yet
- Chapter 7. Complete Metric Spaces and Function SpacesDocument8 pagesChapter 7. Complete Metric Spaces and Function SpacesJuan David TorresNo ratings yet
- ALL SPACETIMES BEYOND EINSTEIN by Frederic P. SchullerDocument44 pagesALL SPACETIMES BEYOND EINSTEIN by Frederic P. SchullerHassan FawazNo ratings yet
- Some Topics in Theory of 2nd Order Elliptic PDEDocument22 pagesSome Topics in Theory of 2nd Order Elliptic PDEAgus LeonardiNo ratings yet
- 2058270581Document11 pages2058270581rafaeloNo ratings yet
- Model Theory and Exponentiation - David MarkerDocument7 pagesModel Theory and Exponentiation - David MarkerPato Navarrete ValenzuelaNo ratings yet
- Abelian Homomorphisms of Lines and Cardano's Conjecture: C. Hausdorff, V. Selberg, E. Torricelli and V. EulerDocument9 pagesAbelian Homomorphisms of Lines and Cardano's Conjecture: C. Hausdorff, V. Selberg, E. Torricelli and V. Eulerv3rgilaNo ratings yet
- I. Distribution Spaces: 1. Motivation and OverviewDocument5 pagesI. Distribution Spaces: 1. Motivation and OverviewJin WangNo ratings yet
- S. V. Astashkin, D. V. Zanin, E. M. Semenov and F. A. Sukochev - Kruglov Operator and Operators Defined by Random PermutationsDocument13 pagesS. V. Astashkin, D. V. Zanin, E. M. Semenov and F. A. Sukochev - Kruglov Operator and Operators Defined by Random PermutationsLekkellNo ratings yet
- GJ KuratowskiDocument34 pagesGJ KuratowskiSara ShoghiNo ratings yet
- 406d PDFDocument6 pages406d PDFseyed amir salmanNo ratings yet
- Lecture Notes in Mathematics 1824: Editors: J. - M. Morel, Cachan F. Takens, Groningen B. Teissier, ParisDocument190 pagesLecture Notes in Mathematics 1824: Editors: J. - M. Morel, Cachan F. Takens, Groningen B. Teissier, ParisVinicioNo ratings yet
- Quaternionic - Hyperholomorphic Functions, Singular Integral Operators and Boundary Value Problems. I. - Hyperholomorphic Function TheoryDocument26 pagesQuaternionic - Hyperholomorphic Functions, Singular Integral Operators and Boundary Value Problems. I. - Hyperholomorphic Function Theoryvbarrera4657No ratings yet
- ComplexDocument288 pagesComplexmartin 80No ratings yet
- Complete Sets of Unifiers and Matchers in Equational Theories 1986 Theoretical Computer ScienceDocument12 pagesComplete Sets of Unifiers and Matchers in Equational Theories 1986 Theoretical Computer ScienceVeronica JohnsonNo ratings yet
- Critical Point TheoryDocument99 pagesCritical Point TheoryGeorge ProtopapasNo ratings yet
- Topological SpaceDocument7 pagesTopological SpaceAlberto Conde MorenoNo ratings yet
- Omoclinic Orbits and Chaotic Behavior in Lassical EchanicsDocument21 pagesOmoclinic Orbits and Chaotic Behavior in Lassical EchanicsDAVID ROSAS VARANo ratings yet
- RealizationsDocument20 pagesRealizationspaul vionNo ratings yet
- Applications of Reimannian Geometry in Physics (General Theory of Relativity)Document14 pagesApplications of Reimannian Geometry in Physics (General Theory of Relativity)Amirhossein HassanabadiNo ratings yet
- Euler FormulaDocument29 pagesEuler FormulaAlone EulerNo ratings yet
- A Geometric Introduction To Commutative Algebra: This Is Still A Draft VersionDocument70 pagesA Geometric Introduction To Commutative Algebra: This Is Still A Draft VersionSr-Eko TundeNo ratings yet
- Math. Moravican27p49-56Document8 pagesMath. Moravican27p49-56Monica Cabria ZambranoNo ratings yet
- On Orthogonal Polynomials in Several Variables: Fields Institute Communications Volume 00, 0000Document23 pagesOn Orthogonal Polynomials in Several Variables: Fields Institute Communications Volume 00, 0000Terwal Aandrés Oortiz VargasNo ratings yet
- Lecture5 SpecrDocument2 pagesLecture5 SpecrSewaNo ratings yet
- Lecture 1Document6 pagesLecture 1oscarNo ratings yet
- Hausdorff Dimension: Volume 11, 1986 Pages 349-383Document36 pagesHausdorff Dimension: Volume 11, 1986 Pages 349-383pipul36No ratings yet
- Kevin Costello - The A-Infinity Operad and The Moduli Space of CurvesDocument14 pagesKevin Costello - The A-Infinity Operad and The Moduli Space of CurvesSwertyyNo ratings yet
- SsurveyDocument10 pagesSsurveyJimmy Támara AlbinoNo ratings yet
- Abstract.: ⊂ R for α ∈ µ, one can study the space E ∈ E, for each α ∈ µ) as a subspace of 'Document21 pagesAbstract.: ⊂ R for α ∈ µ, one can study the space E ∈ E, for each α ∈ µ) as a subspace of 'zaidi2009No ratings yet
- Type Number of Closed GeodesicsDocument29 pagesType Number of Closed GeodesicsAlbertoAlcaláNo ratings yet
- 1 Manifolds, Coordinates, Vector Fields, and Vec-Tor BundlesDocument5 pages1 Manifolds, Coordinates, Vector Fields, and Vec-Tor Bundlesvacastil83No ratings yet
- Lec 01Document7 pagesLec 01matbaila247No ratings yet
- Spectral TheoryDocument129 pagesSpectral TheoryDiego MorenoNo ratings yet
- MathSlov 47-1997-4 9Document16 pagesMathSlov 47-1997-4 9Vasi UtaNo ratings yet
- Solving Fractional Differential Equations Using Fixed Point Results in Generalized Metric Spaces of Perovs TypeDocument12 pagesSolving Fractional Differential Equations Using Fixed Point Results in Generalized Metric Spaces of Perovs TypeMatthew SimeonNo ratings yet
- Algebraic Topology by Tim PerutzDocument86 pagesAlgebraic Topology by Tim PerutzRafael AlmeidaNo ratings yet
- Super-Irreducible Topoi Over Arithmetic, Algebraic, Stochastically Left-One-to-One PlanesDocument20 pagesSuper-Irreducible Topoi Over Arithmetic, Algebraic, Stochastically Left-One-to-One PlanesGathNo ratings yet
- (Evans L., Thompson R.) Introduction To AlgebraicDocument248 pages(Evans L., Thompson R.) Introduction To AlgebraicJean CarlosNo ratings yet
- N Endah 2019 J. Phys. Conf. Ser. 1179 012178 PDFDocument7 pagesN Endah 2019 J. Phys. Conf. Ser. 1179 012178 PDFfeow meowNo ratings yet
- Part 2 Twentieth Century Naval Dockyards Devonport and Portsmouth Characterisation ReportDocument52 pagesPart 2 Twentieth Century Naval Dockyards Devonport and Portsmouth Characterisation ReportToby ChessonNo ratings yet
- What Is Spend AnalysisDocument35 pagesWhat Is Spend AnalysisMahesh NaiduNo ratings yet
- Fábrica de Chocolate UNSAACDocument13 pagesFábrica de Chocolate UNSAACFrank Chulla Montes0% (1)
- Love Marriage Vs Arranged Marriage EssayDocument8 pagesLove Marriage Vs Arranged Marriage Essayezmt6r5c100% (1)
- Career Summary Recruitment (BFSI, Analytics, IT & Non-IT), Leadership Hiring, Training &Document2 pagesCareer Summary Recruitment (BFSI, Analytics, IT & Non-IT), Leadership Hiring, Training &VipinNo ratings yet
- Hemo One Analyser Ise 30102023 v29Document8 pagesHemo One Analyser Ise 30102023 v29mohamedessadiNo ratings yet
- 1 - Proposal For 'Vision'Document3 pages1 - Proposal For 'Vision'hiram lodgeNo ratings yet
- Proprietary & Confidential: This Is A Static Sensitive Device. Handle & Store Appropriately To Prevent Esd DamageDocument2 pagesProprietary & Confidential: This Is A Static Sensitive Device. Handle & Store Appropriately To Prevent Esd DamagePawan PalNo ratings yet
- Mechanism of Titanium Sponge Formation in The Kroll Reduction ReactorDocument11 pagesMechanism of Titanium Sponge Formation in The Kroll Reduction ReactorSrinivasulu PuduNo ratings yet
- Jurnal - Asmawati - E321192152 .Document11 pagesJurnal - Asmawati - E321192152 .Nurul fuadiNo ratings yet
- All Pass Comb FiltersDocument13 pagesAll Pass Comb Filterspho144No ratings yet
- G5 Q2W5 DLL SCIENCE MELCsDocument9 pagesG5 Q2W5 DLL SCIENCE MELCsJohnnefer Caballero CinenseNo ratings yet
- Equity ApplicationDocument3 pagesEquity ApplicationanniesachdevNo ratings yet
- A - B - C - Data Entry Operations (OS)Document24 pagesA - B - C - Data Entry Operations (OS)Indu GoyalNo ratings yet
- Cinnamon Contact StomatitisDocument2 pagesCinnamon Contact StomatitisDwiNo ratings yet
- Cholistan Water Relief Project: Presented By: Zohaib Nishad Muhammad Mohsin Mansur Ahsan Zahid Ghazala Baraki Iqra AbidDocument11 pagesCholistan Water Relief Project: Presented By: Zohaib Nishad Muhammad Mohsin Mansur Ahsan Zahid Ghazala Baraki Iqra AbidMansoor SaeedNo ratings yet
- Acknowledgement ItrDocument1 pageAcknowledgement ItrSourav KumarNo ratings yet
- Imp For As400Document21 pagesImp For As400Dinesh ChaudhariNo ratings yet
- Thrive - Materials Compiled and Prepared by Prasanna RanganathanDocument41 pagesThrive - Materials Compiled and Prepared by Prasanna RanganathanVũ Thanh Đỉnh100% (2)
- Amazon Invoice - Laptop Stand PDFDocument1 pageAmazon Invoice - Laptop Stand PDFAl-Harbi Pvt LtdNo ratings yet
- Scribd File Download Social Advice: Related AdvicesDocument47 pagesScribd File Download Social Advice: Related AdvicesAnonymous pMVR77x1No ratings yet
- Customer Service ExecutiveDocument54 pagesCustomer Service ExecutiveRakshita Bhat100% (1)
- Disk No. Label Comments BootDocument1 pageDisk No. Label Comments BootDavid HiddingsNo ratings yet
- ALB067 Albeo ALV2 Series LED Low Bay Industrial Luminaire Spec SheetDocument4 pagesALB067 Albeo ALV2 Series LED Low Bay Industrial Luminaire Spec SheetsamuelNo ratings yet
- Policy For Take-Back ProgramDocument16 pagesPolicy For Take-Back ProgramShaswat SrivastavaNo ratings yet
- Wine Enthusiast - May 2014Document124 pagesWine Enthusiast - May 2014Johanna Shin100% (1)
- Grade 11 Science 2nd Term Test Paper With Answers 2019 Sinhala Medium North Western ProvinceDocument23 pagesGrade 11 Science 2nd Term Test Paper With Answers 2019 Sinhala Medium North Western ProvinceAshen Vidarshana100% (8)
- Rais12 SM CH19Document29 pagesRais12 SM CH19Anton VitaliNo ratings yet