
Onboard Data Handling and Telemetry: Lesson 5: Onboard Communications Links Introduction & Mil-Std-1553B
Onboard Data Handling and Telemetry: Lesson 5: Onboard Communications Links Introduction & Mil-Std-1553B
You might also like
- Concise Guide to OTN optical transport networksFrom EverandConcise Guide to OTN optical transport networksRating: 4 out of 5 stars4/5 (2)
- Access Network Virtualized Icons (PPT, Yellow)Document2 pagesAccess Network Virtualized Icons (PPT, Yellow)Manuel HijarNo ratings yet
- New Gateway To Computer Science 10Document289 pagesNew Gateway To Computer Science 10Labu Rai100% (1)
- Onboard Data Handling and Telemetry: Lesson 4: Cdhs Design ProcessDocument41 pagesOnboard Data Handling and Telemetry: Lesson 4: Cdhs Design ProcessDavid Diaz RivasNo ratings yet
- Onboard Data Handling and Telemetry: Lesson 2: The Complete Cdhs ArchitectureDocument42 pagesOnboard Data Handling and Telemetry: Lesson 2: The Complete Cdhs ArchitectureDavid Diaz RivasNo ratings yet
- Is Your Physical Cabling Infrastructure Designed To Withstand The Challenges of Constant Change?Document2 pagesIs Your Physical Cabling Infrastructure Designed To Withstand The Challenges of Constant Change?saba0707No ratings yet
- A. K. Mishra DGM LD&C PgcilDocument41 pagesA. K. Mishra DGM LD&C PgcilLD&C ULDCNo ratings yet
- Business Class Long Range, Wireless N, Gigabit Client Bridge/Access PointDocument2 pagesBusiness Class Long Range, Wireless N, Gigabit Client Bridge/Access PointMuzan RizqyNo ratings yet
- SAC Solution of Smart Distribution Automation SystemDocument28 pagesSAC Solution of Smart Distribution Automation Systemmegi agusNo ratings yet
- Phasedarrays KeisightDocument72 pagesPhasedarrays KeisightRamadan AlhalabiNo ratings yet
- System Architecture For AUX SCADADocument1 pageSystem Architecture For AUX SCADAEngr. Nabeel Ahmad KhanNo ratings yet
- Modular Term Blocks PDFDocument571 pagesModular Term Blocks PDFAndes PutraNo ratings yet
- SD250 PowerDocument10 pagesSD250 Powernekann1No ratings yet
- Advantech Ifactory Solution - 20200110Document24 pagesAdvantech Ifactory Solution - 20200110khaledhassangamal9516100% (1)
- Itu-T The Leader On DSL Standards: Your Fast Access To Today's and Future ServicesDocument2 pagesItu-T The Leader On DSL Standards: Your Fast Access To Today's and Future ServicesDavidEsajasNo ratings yet
- Cisco Digital Headend Solution: Bojan Nedelcev Systems Engineer SPVTG - Emerging Markets Belgrade, November 2009Document40 pagesCisco Digital Headend Solution: Bojan Nedelcev Systems Engineer SPVTG - Emerging Markets Belgrade, November 2009Pardomuan SinagaNo ratings yet
- Ecc4100 SkyphyII Dvb-s2 Transceiver Datasheet 007 LoResDocument4 pagesEcc4100 SkyphyII Dvb-s2 Transceiver Datasheet 007 LoResJackson Dias RochaNo ratings yet
- Data Comm TopologyDocument6 pagesData Comm Topologyjoshua adoradorNo ratings yet
- Digital Switching SystemDocument6 pagesDigital Switching SystemAristides AnselmoNo ratings yet
- SCADA ArchitectureDocument1 pageSCADA ArchitecturehhhuangdNo ratings yet
- Scada & Telemetry An OverviewDocument9 pagesScada & Telemetry An Overviewcommunication indirapuramNo ratings yet
- PosterDocument1 pagePosterMichelle VilemaNo ratings yet
- Alstom RTUDocument28 pagesAlstom RTUYasser Ragab100% (1)
- Siemens Distribution Feeder AutomationDocument18 pagesSiemens Distribution Feeder Automationpithoon ungnaparatNo ratings yet
- Prometer 100: In-Built IEC 61850 SupportDocument4 pagesPrometer 100: In-Built IEC 61850 SupportTeguh WaluyoNo ratings yet
- Xem tất cả Compact NS > 630ADocument9 pagesXem tất cả Compact NS > 630AKim TrangNo ratings yet
- Iconos de CiscoDocument18 pagesIconos de CiscoErick AtencioNo ratings yet
- TSCL 9.6Mwp ArchitectureDocument1 pageTSCL 9.6Mwp ArchitectureRaj GaneshNo ratings yet
- Icon Library: Current As of May 26, 2004Document19 pagesIcon Library: Current As of May 26, 2004Mayck VigoNo ratings yet
- BB Network Arch For E4-E5Document31 pagesBB Network Arch For E4-E5Manoj BorahNo ratings yet
- Communication Equipment List For Hvac MCC (Chalmers)Document5 pagesCommunication Equipment List For Hvac MCC (Chalmers)princyphilipNo ratings yet
- 9500 MPR Release 1.0/1.1 Technical Description: Version 2.0 - May 2008Document17 pages9500 MPR Release 1.0/1.1 Technical Description: Version 2.0 - May 2008Juanzbar Huaman SialerNo ratings yet
- Architecture and DSP Implementation of A DVB-S2 BaDocument9 pagesArchitecture and DSP Implementation of A DVB-S2 Bakuang.fanNo ratings yet
- Data Acquisition and Automation Systems: WWW - Seneca.itDocument16 pagesData Acquisition and Automation Systems: WWW - Seneca.itPelle PkNo ratings yet
- Icon Library: Current As of May 26, 2004Document19 pagesIcon Library: Current As of May 26, 2004Roberth Luis Chopitea AguirreNo ratings yet
- Presentaciones Semana 5Document35 pagesPresentaciones Semana 5rjairoNo ratings yet
- 005-1343 - N DCS-5020 SpecDocument4 pages005-1343 - N DCS-5020 SpecKha DinhNo ratings yet
- Compact Fire Detection Control Unit A6V10092709 HQ enDocument8 pagesCompact Fire Detection Control Unit A6V10092709 HQ enerfanmasoudiNo ratings yet
- Mbus 1Document9 pagesMbus 1jhaNo ratings yet
- Emc SCADA PresentationDocument36 pagesEmc SCADA Presentationerode els erodeNo ratings yet
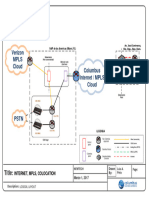
- Internet, MPLS, ColocationDocument1 pageInternet, MPLS, Colocationaneudy guzmanNo ratings yet
- 9500 MPR Release 1.3 Technical Description: V. 3.0 - June 2009Document21 pages9500 MPR Release 1.3 Technical Description: V. 3.0 - June 2009Ahmed AliNo ratings yet
- Substation Automation (OSAS)Document28 pagesSubstation Automation (OSAS)shamsheert100% (2)
- FPGA Implementation of An OFDM Modem: Aifeng Ren, Ming Luo, Fangming HuDocument4 pagesFPGA Implementation of An OFDM Modem: Aifeng Ren, Ming Luo, Fangming HuasitNo ratings yet
- 02 20R300 1 C200 Controller Architecture PDFDocument38 pages02 20R300 1 C200 Controller Architecture PDFmira100% (1)
- RUT956 Datasheet-V1.1Document15 pagesRUT956 Datasheet-V1.1Preeti Sharma EEELNo ratings yet
- ADIS16204BCCZDocument24 pagesADIS16204BCCZhermesNo ratings yet
- Ansi LV MCC CCBR-SMCC2-1009Document8 pagesAnsi LV MCC CCBR-SMCC2-1009Jaime PaizNo ratings yet
- Data Sheet KW919-SMIDS Iss02Document2 pagesData Sheet KW919-SMIDS Iss02arjun roy ENo ratings yet
- Flexible Low-Cost Data Capture Technology For Road NetworksDocument9 pagesFlexible Low-Cost Data Capture Technology For Road NetworksNebojsa RadovicNo ratings yet
- Advantys STB BrochureDocument8 pagesAdvantys STB BrochurerubysultanaNo ratings yet
- How To DesignDocument6 pagesHow To DesignphieuxuatkhoNo ratings yet
- Brochure Serie Z PC Eng Aprile 2021Document16 pagesBrochure Serie Z PC Eng Aprile 2021Samir LTAIEFNo ratings yet
- Advanced Motion Controls DPRAHIA-060A400Document11 pagesAdvanced Motion Controls DPRAHIA-060A400Servo2GoNo ratings yet
- Communication-Capable Controlgear: Profibus-DpDocument1 pageCommunication-Capable Controlgear: Profibus-DpchochoroyNo ratings yet
- Sc900a PDFDocument23 pagesSc900a PDFgoguNo ratings yet
- Network Symbols2Document23 pagesNetwork Symbols2flash driveNo ratings yet
- 0556 - Seneca Z PC EngDocument16 pages0556 - Seneca Z PC EngSupportNo ratings yet
- Networking SymbolsDocument26 pagesNetworking SymbolsmebbymebbyNo ratings yet
- Migrating Teleprotection Application Ipmpls Networks PDFDocument15 pagesMigrating Teleprotection Application Ipmpls Networks PDFLuiss SelvasNo ratings yet
- RMC 150 DatasheetDocument20 pagesRMC 150 DatasheetIthanLeonardoNo ratings yet
- Onboard Data Handling and TelemetryDocument40 pagesOnboard Data Handling and TelemetryDavid Diaz RivasNo ratings yet
- Onboard Data Handling and TelemetryDocument65 pagesOnboard Data Handling and TelemetryDavid Diaz RivasNo ratings yet
- Kahoot QuestionsDocument48 pagesKahoot QuestionsDavid Diaz RivasNo ratings yet
- EODP Environment R1.0Document115 pagesEODP Environment R1.0David Diaz RivasNo ratings yet
- Quezon City Polytechnic UniversityDocument48 pagesQuezon City Polytechnic UniversityWarriormikeNo ratings yet
- Eve Ce Book 5.3 2023 PDFDocument159 pagesEve Ce Book 5.3 2023 PDFMGNo ratings yet
- Cs6551 Computer Network Notes RejinpaulDocument225 pagesCs6551 Computer Network Notes Rejinpaullogesswari srinivasanNo ratings yet
- Unit-1 Introduction To Computer Networks & InternetDocument30 pagesUnit-1 Introduction To Computer Networks & Internetbffs814No ratings yet
- Compare Performance of 2D and 3D Mesh Architectures in Network-On-ChipDocument5 pagesCompare Performance of 2D and 3D Mesh Architectures in Network-On-ChipJournal of ComputingNo ratings yet
- IOT Wired ProtocolsDocument6 pagesIOT Wired ProtocolsutpolaNo ratings yet
- TAC Xenta 411/412: Digital Input ModuleDocument3 pagesTAC Xenta 411/412: Digital Input ModuleTeddy HariyantoNo ratings yet
- Deltav Control Network Hardware3591Document13 pagesDeltav Control Network Hardware3591Denis FyodorovNo ratings yet
- 4 NetworksDocument81 pages4 NetworksSaurabh JainNo ratings yet
- PROFINET Commissioning 8082 V144 Sep19Document161 pagesPROFINET Commissioning 8082 V144 Sep19saidloubarNo ratings yet
- Abb Drives: User'S Manual Controlnet Adapter Module Rcna-01Document60 pagesAbb Drives: User'S Manual Controlnet Adapter Module Rcna-01rashidNo ratings yet
- 5.2.2.9 Lab - Configuring Switch Security FeaturesDocument10 pages5.2.2.9 Lab - Configuring Switch Security FeaturesJuan Augusto Castro Sanchez0% (1)
- Local Area Network Trainer (Model: Xpo-Lan) : Technical SpecificationDocument1 pageLocal Area Network Trainer (Model: Xpo-Lan) : Technical SpecificationRamesh Ullattil100% (1)
- Spanning Tree Protocols 1108Document76 pagesSpanning Tree Protocols 1108muhammadmusakhanNo ratings yet
- CCNA 1 v51 v60 Chapter 4 Exam Answers 2017 100 FullDocument11 pagesCCNA 1 v51 v60 Chapter 4 Exam Answers 2017 100 FullAldo Francisco Resendiz HernandezNo ratings yet
- Advances in Machine Learning and Signal ProcessingDocument309 pagesAdvances in Machine Learning and Signal ProcessingOsva VelardeNo ratings yet
- Ring NetworkDocument8 pagesRing Networkzackcore98100% (1)
- LTRT 91040 One Voice Operations Center Users Manual Ver 74Document194 pagesLTRT 91040 One Voice Operations Center Users Manual Ver 74erikaNo ratings yet
- Tugas Makalah Pengantar Aplikasi KomputerDocument11 pagesTugas Makalah Pengantar Aplikasi KomputerNerin Achandye0% (1)
- Vishnu Institute of Technology: V2V CommunicationsDocument22 pagesVishnu Institute of Technology: V2V CommunicationsBhanu PrakashNo ratings yet
- Computer Network Thesis IdeasDocument8 pagesComputer Network Thesis Ideasdwtnpjyv100% (2)
- Ccna Symbols and Icons Hub Switch and Router Network Topologies Lans and Wans Ip Address Classes Subnetting and Subnet MaskDocument24 pagesCcna Symbols and Icons Hub Switch and Router Network Topologies Lans and Wans Ip Address Classes Subnetting and Subnet MaskHimanshu SharmaNo ratings yet
- Computer Science Full GCSE NotesDocument16 pagesComputer Science Full GCSE Notespty62ng7cpNo ratings yet
- Ict TG S2Document55 pagesIct TG S2wakiroivanNo ratings yet
- Huawei S6720-HI Series Switches BrochureDocument8 pagesHuawei S6720-HI Series Switches BrochureVillatoro ChrisNo ratings yet
- OC 6000e System OverviewDocument33 pagesOC 6000e System OverviewKiên NguyễnNo ratings yet
- Altera Device Layout Review WorksheetDocument47 pagesAltera Device Layout Review WorksheetLê Đình TiếnNo ratings yet
- Operation Log 20231012112322Document3,948 pagesOperation Log 20231012112322Syed Noor HasanNo ratings yet
- Cn-Lab ManualDocument44 pagesCn-Lab ManualRohit kumarNo ratings yet




























































































Download as pdf or txt
You might also like
- Concise Guide to OTN optical transport networksFrom EverandConcise Guide to OTN optical transport networksRating: 4 out of 5 stars4/5 (2)
- Access Network Virtualized Icons (PPT, Yellow)Document2 pagesAccess Network Virtualized Icons (PPT, Yellow)Manuel HijarNo ratings yet
- New Gateway To Computer Science 10Document289 pagesNew Gateway To Computer Science 10Labu Rai100% (1)
- Onboard Data Handling and Telemetry: Lesson 4: Cdhs Design ProcessDocument41 pagesOnboard Data Handling and Telemetry: Lesson 4: Cdhs Design ProcessDavid Diaz RivasNo ratings yet
- Onboard Data Handling and Telemetry: Lesson 2: The Complete Cdhs ArchitectureDocument42 pagesOnboard Data Handling and Telemetry: Lesson 2: The Complete Cdhs ArchitectureDavid Diaz RivasNo ratings yet
- Is Your Physical Cabling Infrastructure Designed To Withstand The Challenges of Constant Change?Document2 pagesIs Your Physical Cabling Infrastructure Designed To Withstand The Challenges of Constant Change?saba0707No ratings yet
- A. K. Mishra DGM LD&C PgcilDocument41 pagesA. K. Mishra DGM LD&C PgcilLD&C ULDCNo ratings yet
- Business Class Long Range, Wireless N, Gigabit Client Bridge/Access PointDocument2 pagesBusiness Class Long Range, Wireless N, Gigabit Client Bridge/Access PointMuzan RizqyNo ratings yet
- SAC Solution of Smart Distribution Automation SystemDocument28 pagesSAC Solution of Smart Distribution Automation Systemmegi agusNo ratings yet
- Phasedarrays KeisightDocument72 pagesPhasedarrays KeisightRamadan AlhalabiNo ratings yet
- System Architecture For AUX SCADADocument1 pageSystem Architecture For AUX SCADAEngr. Nabeel Ahmad KhanNo ratings yet
- Modular Term Blocks PDFDocument571 pagesModular Term Blocks PDFAndes PutraNo ratings yet
- SD250 PowerDocument10 pagesSD250 Powernekann1No ratings yet
- Advantech Ifactory Solution - 20200110Document24 pagesAdvantech Ifactory Solution - 20200110khaledhassangamal9516100% (1)
- Itu-T The Leader On DSL Standards: Your Fast Access To Today's and Future ServicesDocument2 pagesItu-T The Leader On DSL Standards: Your Fast Access To Today's and Future ServicesDavidEsajasNo ratings yet
- Cisco Digital Headend Solution: Bojan Nedelcev Systems Engineer SPVTG - Emerging Markets Belgrade, November 2009Document40 pagesCisco Digital Headend Solution: Bojan Nedelcev Systems Engineer SPVTG - Emerging Markets Belgrade, November 2009Pardomuan SinagaNo ratings yet
- Ecc4100 SkyphyII Dvb-s2 Transceiver Datasheet 007 LoResDocument4 pagesEcc4100 SkyphyII Dvb-s2 Transceiver Datasheet 007 LoResJackson Dias RochaNo ratings yet
- Data Comm TopologyDocument6 pagesData Comm Topologyjoshua adoradorNo ratings yet
- Digital Switching SystemDocument6 pagesDigital Switching SystemAristides AnselmoNo ratings yet
- SCADA ArchitectureDocument1 pageSCADA ArchitecturehhhuangdNo ratings yet
- Scada & Telemetry An OverviewDocument9 pagesScada & Telemetry An Overviewcommunication indirapuramNo ratings yet
- PosterDocument1 pagePosterMichelle VilemaNo ratings yet
- Alstom RTUDocument28 pagesAlstom RTUYasser Ragab100% (1)
- Siemens Distribution Feeder AutomationDocument18 pagesSiemens Distribution Feeder Automationpithoon ungnaparatNo ratings yet
- Prometer 100: In-Built IEC 61850 SupportDocument4 pagesPrometer 100: In-Built IEC 61850 SupportTeguh WaluyoNo ratings yet
- Xem tất cả Compact NS > 630ADocument9 pagesXem tất cả Compact NS > 630AKim TrangNo ratings yet
- Iconos de CiscoDocument18 pagesIconos de CiscoErick AtencioNo ratings yet
- TSCL 9.6Mwp ArchitectureDocument1 pageTSCL 9.6Mwp ArchitectureRaj GaneshNo ratings yet
- Icon Library: Current As of May 26, 2004Document19 pagesIcon Library: Current As of May 26, 2004Mayck VigoNo ratings yet
- BB Network Arch For E4-E5Document31 pagesBB Network Arch For E4-E5Manoj BorahNo ratings yet
- Communication Equipment List For Hvac MCC (Chalmers)Document5 pagesCommunication Equipment List For Hvac MCC (Chalmers)princyphilipNo ratings yet
- 9500 MPR Release 1.0/1.1 Technical Description: Version 2.0 - May 2008Document17 pages9500 MPR Release 1.0/1.1 Technical Description: Version 2.0 - May 2008Juanzbar Huaman SialerNo ratings yet
- Architecture and DSP Implementation of A DVB-S2 BaDocument9 pagesArchitecture and DSP Implementation of A DVB-S2 Bakuang.fanNo ratings yet
- Data Acquisition and Automation Systems: WWW - Seneca.itDocument16 pagesData Acquisition and Automation Systems: WWW - Seneca.itPelle PkNo ratings yet
- Icon Library: Current As of May 26, 2004Document19 pagesIcon Library: Current As of May 26, 2004Roberth Luis Chopitea AguirreNo ratings yet
- Presentaciones Semana 5Document35 pagesPresentaciones Semana 5rjairoNo ratings yet
- 005-1343 - N DCS-5020 SpecDocument4 pages005-1343 - N DCS-5020 SpecKha DinhNo ratings yet
- Compact Fire Detection Control Unit A6V10092709 HQ enDocument8 pagesCompact Fire Detection Control Unit A6V10092709 HQ enerfanmasoudiNo ratings yet
- Mbus 1Document9 pagesMbus 1jhaNo ratings yet
- Emc SCADA PresentationDocument36 pagesEmc SCADA Presentationerode els erodeNo ratings yet
- Internet, MPLS, ColocationDocument1 pageInternet, MPLS, Colocationaneudy guzmanNo ratings yet
- 9500 MPR Release 1.3 Technical Description: V. 3.0 - June 2009Document21 pages9500 MPR Release 1.3 Technical Description: V. 3.0 - June 2009Ahmed AliNo ratings yet
- Substation Automation (OSAS)Document28 pagesSubstation Automation (OSAS)shamsheert100% (2)
- FPGA Implementation of An OFDM Modem: Aifeng Ren, Ming Luo, Fangming HuDocument4 pagesFPGA Implementation of An OFDM Modem: Aifeng Ren, Ming Luo, Fangming HuasitNo ratings yet
- 02 20R300 1 C200 Controller Architecture PDFDocument38 pages02 20R300 1 C200 Controller Architecture PDFmira100% (1)
- RUT956 Datasheet-V1.1Document15 pagesRUT956 Datasheet-V1.1Preeti Sharma EEELNo ratings yet
- ADIS16204BCCZDocument24 pagesADIS16204BCCZhermesNo ratings yet
- Ansi LV MCC CCBR-SMCC2-1009Document8 pagesAnsi LV MCC CCBR-SMCC2-1009Jaime PaizNo ratings yet
- Data Sheet KW919-SMIDS Iss02Document2 pagesData Sheet KW919-SMIDS Iss02arjun roy ENo ratings yet
- Flexible Low-Cost Data Capture Technology For Road NetworksDocument9 pagesFlexible Low-Cost Data Capture Technology For Road NetworksNebojsa RadovicNo ratings yet
- Advantys STB BrochureDocument8 pagesAdvantys STB BrochurerubysultanaNo ratings yet
- How To DesignDocument6 pagesHow To DesignphieuxuatkhoNo ratings yet
- Brochure Serie Z PC Eng Aprile 2021Document16 pagesBrochure Serie Z PC Eng Aprile 2021Samir LTAIEFNo ratings yet
- Advanced Motion Controls DPRAHIA-060A400Document11 pagesAdvanced Motion Controls DPRAHIA-060A400Servo2GoNo ratings yet
- Communication-Capable Controlgear: Profibus-DpDocument1 pageCommunication-Capable Controlgear: Profibus-DpchochoroyNo ratings yet
- Sc900a PDFDocument23 pagesSc900a PDFgoguNo ratings yet
- Network Symbols2Document23 pagesNetwork Symbols2flash driveNo ratings yet
- 0556 - Seneca Z PC EngDocument16 pages0556 - Seneca Z PC EngSupportNo ratings yet
- Networking SymbolsDocument26 pagesNetworking SymbolsmebbymebbyNo ratings yet
- Migrating Teleprotection Application Ipmpls Networks PDFDocument15 pagesMigrating Teleprotection Application Ipmpls Networks PDFLuiss SelvasNo ratings yet
- RMC 150 DatasheetDocument20 pagesRMC 150 DatasheetIthanLeonardoNo ratings yet
- Onboard Data Handling and TelemetryDocument40 pagesOnboard Data Handling and TelemetryDavid Diaz RivasNo ratings yet
- Onboard Data Handling and TelemetryDocument65 pagesOnboard Data Handling and TelemetryDavid Diaz RivasNo ratings yet
- Kahoot QuestionsDocument48 pagesKahoot QuestionsDavid Diaz RivasNo ratings yet
- EODP Environment R1.0Document115 pagesEODP Environment R1.0David Diaz RivasNo ratings yet
- Quezon City Polytechnic UniversityDocument48 pagesQuezon City Polytechnic UniversityWarriormikeNo ratings yet
- Eve Ce Book 5.3 2023 PDFDocument159 pagesEve Ce Book 5.3 2023 PDFMGNo ratings yet
- Cs6551 Computer Network Notes RejinpaulDocument225 pagesCs6551 Computer Network Notes Rejinpaullogesswari srinivasanNo ratings yet
- Unit-1 Introduction To Computer Networks & InternetDocument30 pagesUnit-1 Introduction To Computer Networks & Internetbffs814No ratings yet
- Compare Performance of 2D and 3D Mesh Architectures in Network-On-ChipDocument5 pagesCompare Performance of 2D and 3D Mesh Architectures in Network-On-ChipJournal of ComputingNo ratings yet
- IOT Wired ProtocolsDocument6 pagesIOT Wired ProtocolsutpolaNo ratings yet
- TAC Xenta 411/412: Digital Input ModuleDocument3 pagesTAC Xenta 411/412: Digital Input ModuleTeddy HariyantoNo ratings yet
- Deltav Control Network Hardware3591Document13 pagesDeltav Control Network Hardware3591Denis FyodorovNo ratings yet
- 4 NetworksDocument81 pages4 NetworksSaurabh JainNo ratings yet
- PROFINET Commissioning 8082 V144 Sep19Document161 pagesPROFINET Commissioning 8082 V144 Sep19saidloubarNo ratings yet
- Abb Drives: User'S Manual Controlnet Adapter Module Rcna-01Document60 pagesAbb Drives: User'S Manual Controlnet Adapter Module Rcna-01rashidNo ratings yet
- 5.2.2.9 Lab - Configuring Switch Security FeaturesDocument10 pages5.2.2.9 Lab - Configuring Switch Security FeaturesJuan Augusto Castro Sanchez0% (1)
- Local Area Network Trainer (Model: Xpo-Lan) : Technical SpecificationDocument1 pageLocal Area Network Trainer (Model: Xpo-Lan) : Technical SpecificationRamesh Ullattil100% (1)
- Spanning Tree Protocols 1108Document76 pagesSpanning Tree Protocols 1108muhammadmusakhanNo ratings yet
- CCNA 1 v51 v60 Chapter 4 Exam Answers 2017 100 FullDocument11 pagesCCNA 1 v51 v60 Chapter 4 Exam Answers 2017 100 FullAldo Francisco Resendiz HernandezNo ratings yet
- Advances in Machine Learning and Signal ProcessingDocument309 pagesAdvances in Machine Learning and Signal ProcessingOsva VelardeNo ratings yet
- Ring NetworkDocument8 pagesRing Networkzackcore98100% (1)
- LTRT 91040 One Voice Operations Center Users Manual Ver 74Document194 pagesLTRT 91040 One Voice Operations Center Users Manual Ver 74erikaNo ratings yet
- Tugas Makalah Pengantar Aplikasi KomputerDocument11 pagesTugas Makalah Pengantar Aplikasi KomputerNerin Achandye0% (1)
- Vishnu Institute of Technology: V2V CommunicationsDocument22 pagesVishnu Institute of Technology: V2V CommunicationsBhanu PrakashNo ratings yet
- Computer Network Thesis IdeasDocument8 pagesComputer Network Thesis Ideasdwtnpjyv100% (2)
- Ccna Symbols and Icons Hub Switch and Router Network Topologies Lans and Wans Ip Address Classes Subnetting and Subnet MaskDocument24 pagesCcna Symbols and Icons Hub Switch and Router Network Topologies Lans and Wans Ip Address Classes Subnetting and Subnet MaskHimanshu SharmaNo ratings yet
- Computer Science Full GCSE NotesDocument16 pagesComputer Science Full GCSE Notespty62ng7cpNo ratings yet
- Ict TG S2Document55 pagesIct TG S2wakiroivanNo ratings yet
- Huawei S6720-HI Series Switches BrochureDocument8 pagesHuawei S6720-HI Series Switches BrochureVillatoro ChrisNo ratings yet
- OC 6000e System OverviewDocument33 pagesOC 6000e System OverviewKiên NguyễnNo ratings yet
- Altera Device Layout Review WorksheetDocument47 pagesAltera Device Layout Review WorksheetLê Đình TiếnNo ratings yet
- Operation Log 20231012112322Document3,948 pagesOperation Log 20231012112322Syed Noor HasanNo ratings yet
- Cn-Lab ManualDocument44 pagesCn-Lab ManualRohit kumarNo ratings yet