Download as pdf or txt
You might also like
- Pervez Ghauri, Kjell Grønhaug, Roger Strange - Research Methods in Business Studies (2020, Cambridge University Press) PDFDocument350 pagesPervez Ghauri, Kjell Grønhaug, Roger Strange - Research Methods in Business Studies (2020, Cambridge University Press) PDFMohammad Al-arrabi Aldhidi67% (3)
- The Pyrotechnic CookbookDocument125 pagesThe Pyrotechnic CookbookDjuric Zoran100% (1)
- Torque Draft Force Requirement Rotary TillerDocument13 pagesTorque Draft Force Requirement Rotary Tillerbalasubramani krishnamurthiNo ratings yet
- Marcos NovakDocument21 pagesMarcos NovakArunagiri Kongu-UsecNo ratings yet
- A Model Establishment and Numerical Simulation of Dynamic Coupled Hydraulic-Mechanical-Electric-Structural System For Hydropower StationDocument16 pagesA Model Establishment and Numerical Simulation of Dynamic Coupled Hydraulic-Mechanical-Electric-Structural System For Hydropower StationElio RiachiNo ratings yet
- Review of Permanent-Magnet Brushless DC Motor Basic Drives Based On Analysis and Simulation StudyDocument29 pagesReview of Permanent-Magnet Brushless DC Motor Basic Drives Based On Analysis and Simulation StudymitulNo ratings yet
- Condition Monitoring of Rotating Electrical MachinDocument34 pagesCondition Monitoring of Rotating Electrical Machinاحسان اسرافیلیNo ratings yet
- A High-Speed Microturbine Pma-Synrg Emulation Using Power Hardware-In-The-Loop For Wind Energy Conversion SystemsDocument11 pagesA High-Speed Microturbine Pma-Synrg Emulation Using Power Hardware-In-The-Loop For Wind Energy Conversion SystemsMahmoud AminNo ratings yet
- Review of Permanent-Magnet Brushless DC Motor Basic DrivesDocument28 pagesReview of Permanent-Magnet Brushless DC Motor Basic DrivesIan SilveiraNo ratings yet
- 2007PEC Li Froehleke BoeckerDocument5 pages2007PEC Li Froehleke BoeckerMaha SoeNo ratings yet
- Review of Condition Monitoring of Rotating Electri PDFDocument34 pagesReview of Condition Monitoring of Rotating Electri PDFmerecis920No ratings yet
- 1 PDFsam Partcondition Monitoring of Rotating Electrical MachinDocument6 pages1 PDFsam Partcondition Monitoring of Rotating Electrical MachinShah PriyeshNo ratings yet
- Torsional Vibration Problem in Reciprocating Compressor - Case StudyDocument11 pagesTorsional Vibration Problem in Reciprocating Compressor - Case Studysandeep@homeNo ratings yet
- Fullppt 181217105921 PDFDocument123 pagesFullppt 181217105921 PDFC-50 Suyog SawantNo ratings yet
- Feedforward Flux-Weakening Control of Surface-Mounted Permanent-Magnet Synchronous Motors Accounting For Resistive Voltage DropDocument10 pagesFeedforward Flux-Weakening Control of Surface-Mounted Permanent-Magnet Synchronous Motors Accounting For Resistive Voltage DropTrần Tấn LộcNo ratings yet
- Dynamic Modeling of Universal Motors: June 1999Document4 pagesDynamic Modeling of Universal Motors: June 1999mehdi refoufiNo ratings yet
- Lap Winding Simplex and Duplex Lap Winding - Electrical4u.htmlDocument5 pagesLap Winding Simplex and Duplex Lap Winding - Electrical4u.htmlAnoop RepakaNo ratings yet
- FINALVERSIONDocument11 pagesFINALVERSIONAimmadNo ratings yet
- Paper 5Document12 pagesPaper 5headerwebNo ratings yet
- Analysis and Reduction of Time Harmonic Rotor Loss in Solid-Rotor Synchronous Reluctance DriveDocument8 pagesAnalysis and Reduction of Time Harmonic Rotor Loss in Solid-Rotor Synchronous Reluctance DrivemitsuiNo ratings yet
- Bon Thu 2017Document9 pagesBon Thu 2017fbhkeNo ratings yet
- A Generalized Dynamic Model For Brushless Doubly-Fed Induction MachinesDocument11 pagesA Generalized Dynamic Model For Brushless Doubly-Fed Induction MachinesTarak BenslimaneNo ratings yet
- A Guide For Synchronous Generator Parameters Determination Using Dynamic Simulations Based On IEEE StandardsDocument7 pagesA Guide For Synchronous Generator Parameters Determination Using Dynamic Simulations Based On IEEE StandardsRitesh BhattNo ratings yet
- Fractional Slot Permanent Magnet Synchronous Motors For Low Speed ApplicationsDocument152 pagesFractional Slot Permanent Magnet Synchronous Motors For Low Speed ApplicationsbriscabarombiNo ratings yet
- Estimation of Typical Squirrel-Cage Induction Motor Parameters For Dynamic Performance SimulationDocument10 pagesEstimation of Typical Squirrel-Cage Induction Motor Parameters For Dynamic Performance SimulationcontenteeeNo ratings yet
- Early Access Article 07563408Document12 pagesEarly Access Article 07563408Suba ShiniNo ratings yet
- Applied Energy: Contents Lists Available atDocument13 pagesApplied Energy: Contents Lists Available atam_r_lNo ratings yet
- Runner Blade Number Influencing RPT Runner Flow Characterist - 2020 - RenewableDocument16 pagesRunner Blade Number Influencing RPT Runner Flow Characterist - 2020 - RenewableMaxime BinamaNo ratings yet
- IEEE STD 519 1992vs2014Document50 pagesIEEE STD 519 1992vs2014DaniNurFaruqNo ratings yet
- Superconducting Rotating Machines A Review of The - 1 PDFDocument8 pagesSuperconducting Rotating Machines A Review of The - 1 PDFMalik AbdurrahmanNo ratings yet
- Final Et NotesDocument123 pagesFinal Et NotesyounusmohamadNo ratings yet
- Gujarat Technological University: Magnetic Fields and Magnetic CircuitsDocument3 pagesGujarat Technological University: Magnetic Fields and Magnetic CircuitsDarshit KotadiyaNo ratings yet
- RESEARCH TO STUDY VARIABLE FREQUENCY DRIVE AND ITS ENERGY SAVINGs PDFDocument77 pagesRESEARCH TO STUDY VARIABLE FREQUENCY DRIVE AND ITS ENERGY SAVINGs PDFMohammad QureshiNo ratings yet
- Induction Machine ModelDocument9 pagesInduction Machine ModelHernanda BudizNo ratings yet
- Matrix ConveterDocument12 pagesMatrix ConveterViệt NguyễnNo ratings yet
- Combined Electrical and Mechanical Model of Electric Submersible PumpsDocument7 pagesCombined Electrical and Mechanical Model of Electric Submersible PumpsgilangpasekaNo ratings yet
- Analysis of Induction Machine Dynamics During Power System UnbalancesDocument199 pagesAnalysis of Induction Machine Dynamics During Power System Unbalancesthanh haNo ratings yet
- Compatibility Design of Non Salient Pole Synchronous GeneratorDocument4 pagesCompatibility Design of Non Salient Pole Synchronous GeneratorEditor IJTSRDNo ratings yet
- Analysis of The Residual Flux Influence On InrushDocument4 pagesAnalysis of The Residual Flux Influence On InrushMoba AddictNo ratings yet
- Veículos Elétricos e Híbridos - Power Electronics and MotorsDocument111 pagesVeículos Elétricos e Híbridos - Power Electronics and MotorsBruno VescoviNo ratings yet
- 12 Tie 0965 R2Document12 pages12 Tie 0965 R2ZahraaRaz 1996No ratings yet
- Kutt Filip PHD ZabDocument164 pagesKutt Filip PHD ZabwilliamNo ratings yet
- Mcmurray 1980Document11 pagesMcmurray 1980Lucian BaltesNo ratings yet
- Zhang - Performance Prediction of PV ModulesDocument14 pagesZhang - Performance Prediction of PV ModulesosmanalNo ratings yet
- Investigation of Permanent-Magnet Motor Drives Incorporating Damper Bars For Electrified VehiclesDocument11 pagesInvestigation of Permanent-Magnet Motor Drives Incorporating Damper Bars For Electrified Vehiclespathfinder tamlukNo ratings yet
- A Closed-Form Solution To Fault Parameter Estimation and Faulty Phase Identification of Stator Winding Inter-Turn Fault in Induction MachinesDocument10 pagesA Closed-Form Solution To Fault Parameter Estimation and Faulty Phase Identification of Stator Winding Inter-Turn Fault in Induction MachinesAndréNo ratings yet
- Calculation of The Rotor Bar Resistance and LeakagDocument3 pagesCalculation of The Rotor Bar Resistance and LeakagLucas uvNo ratings yet
- D.C. Machine - Study NotesDocument32 pagesD.C. Machine - Study NotesGentle ManNo ratings yet
- ANSI (ST) - I Electric Motors 07042020Document63 pagesANSI (ST) - I Electric Motors 07042020Ankit PalNo ratings yet
- H T Drives PDFDocument58 pagesH T Drives PDFDipikaNo ratings yet
- Selection of Motor For An Electric Vehicle: A ReviewDocument12 pagesSelection of Motor For An Electric Vehicle: A ReviewPedro Andrade de Oliveira0% (1)
- Electric Vehicle Traction Based On A PM Assisted Synchronous Reluctance MotorDocument6 pagesElectric Vehicle Traction Based On A PM Assisted Synchronous Reluctance Motors2858No ratings yet
- In-Wheel Motor Design For Electric VehiclesDocument7 pagesIn-Wheel Motor Design For Electric VehiclesHuNo ratings yet
- Diagnosis of Axial Displacement in Transformer Windings Using Finite Element AnalysisDocument7 pagesDiagnosis of Axial Displacement in Transformer Windings Using Finite Element AnalysisWillyNo ratings yet
- Design Considerations For Switched Reluctance Motor: Arthur VDocument9 pagesDesign Considerations For Switched Reluctance Motor: Arthur VSuman SahaNo ratings yet
- Class 5 - 6 Analogous SystemsDocument22 pagesClass 5 - 6 Analogous Systemsapi-2667661650% (2)
- Modelling and Analysis Using Mat LabDocument13 pagesModelling and Analysis Using Mat LabIndhumathy BaskerNo ratings yet
- Journalnx PZTDocument3 pagesJournalnx PZTJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Power Electronics Based FACTS Controller For StabiDocument9 pagesPower Electronics Based FACTS Controller For StabiMuntasir AnwarNo ratings yet
- Analyzing The Starting Current of Induction Motor in ATP: Journal Paper ReviewDocument5 pagesAnalyzing The Starting Current of Induction Motor in ATP: Journal Paper ReviewAbhishek JoshiNo ratings yet
- Design Requirements of Generators Applied To Low-Head Hydro Power PlantsDocument9 pagesDesign Requirements of Generators Applied To Low-Head Hydro Power PlantsЖивотаЛазаревићNo ratings yet
- Motion Control With Induction MotorsDocument26 pagesMotion Control With Induction MotorsGabriel VilknNo ratings yet
- Wireless Power Transfer: Using Magnetic and Electric Resonance Coupling TechniquesFrom EverandWireless Power Transfer: Using Magnetic and Electric Resonance Coupling TechniquesNo ratings yet
- Wheel Slip-Sinkage and Its Prediction Model of Lunar RoverDocument7 pagesWheel Slip-Sinkage and Its Prediction Model of Lunar Roverbalasubramani krishnamurthiNo ratings yet
- Lever 1Document1 pageLever 1balasubramani krishnamurthiNo ratings yet
- Treo Zor BrochureDocument10 pagesTreo Zor Brochurebalasubramani krishnamurthiNo ratings yet
- Godrej 1 5 To 3 Ton Electric Forklifts NeoDocument12 pagesGodrej 1 5 To 3 Ton Electric Forklifts Neobalasubramani krishnamurthiNo ratings yet
- BF 00719075Document3 pagesBF 00719075balasubramani krishnamurthiNo ratings yet
- Horizontal Shaft Gasoline (Petrol) Engine: 2.2 KW (3.0 HP) / 3 600 MinDocument4 pagesHorizontal Shaft Gasoline (Petrol) Engine: 2.2 KW (3.0 HP) / 3 600 Minbalasubramani krishnamurthiNo ratings yet
- Oxygen Purity Analyser (OMD-401D)Document1 pageOxygen Purity Analyser (OMD-401D)balasubramani krishnamurthiNo ratings yet
- Common Mode Filters / Chokes ACP3225-102-2P-T000: Wire Wound PowerDocument3 pagesCommon Mode Filters / Chokes ACP3225-102-2P-T000: Wire Wound Powerbalasubramani krishnamurthiNo ratings yet
- V Cool PulleysDocument4 pagesV Cool Pulleysbalasubramani krishnamurthiNo ratings yet
- Basics of PVT AnalysisDocument2 pagesBasics of PVT AnalysisYamal E Askoul TNo ratings yet
- (Swanson 1961) Swanson Magnus Effect Review PaperDocument10 pages(Swanson 1961) Swanson Magnus Effect Review PaperSam Kasper100% (1)
- DHI-MXVR1004: H.265 Penta-Brid 2 SDDocument2 pagesDHI-MXVR1004: H.265 Penta-Brid 2 SDMiguel PradoNo ratings yet
- Topic 1 - Tuned Mass DamperDocument45 pagesTopic 1 - Tuned Mass DamperdhanarajNo ratings yet
- Akumulator Sa HidrogenomDocument6 pagesAkumulator Sa Hidrogenombhstudent_537083349No ratings yet
- Lotus Temple MagazineDocument34 pagesLotus Temple MagazineDivyata DhakalNo ratings yet
- Ficha-Ingl-4to. A-B - Semana 3Document3 pagesFicha-Ingl-4to. A-B - Semana 3wilder chiroqueNo ratings yet
- Afm ButterflyDocument5 pagesAfm ButterflyAna-Maria MaticuNo ratings yet
- BS 7671-2001 - 16th Edition IEE Wiring Regulations - Design & VerificationsDocument8 pagesBS 7671-2001 - 16th Edition IEE Wiring Regulations - Design & VerificationsAshwin DuhonarrainNo ratings yet
- Unimog Brochures Uhn Basic en PDFDocument16 pagesUnimog Brochures Uhn Basic en PDFLuis SousaNo ratings yet
- WB11Document475 pagesWB11Prasad MaratheNo ratings yet
- Research Methodology MBADocument3 pagesResearch Methodology MBAYogesh KumarNo ratings yet
- Tara Balam... : How To Caluculate Tarabalam?Document6 pagesTara Balam... : How To Caluculate Tarabalam?krishnaNo ratings yet
- Geometry Book-Chapter 5.2Document6 pagesGeometry Book-Chapter 5.2alternativoNo ratings yet
- 48900Document22 pages48900Jeff RobertNo ratings yet
- Collabland: Software For Digitization and Mosaicing of Land Survey MapsDocument58 pagesCollabland: Software For Digitization and Mosaicing of Land Survey MapsMehaboob TeachesNo ratings yet
- A Novel Design of Flower Tying Machine: ISSN-2394-5125Document4 pagesA Novel Design of Flower Tying Machine: ISSN-2394-5125aruljeromeNo ratings yet
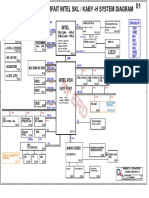
- Power Pavilion Parfait Intel SKL / Kaby - H System DiagramDocument52 pagesPower Pavilion Parfait Intel SKL / Kaby - H System DiagramAbnesis NesisNo ratings yet
- QRCMDocument7 pagesQRCMAiyappa DevrajNo ratings yet
- Preliminary Data Sheet: Product DescriptionDocument3 pagesPreliminary Data Sheet: Product Descriptionfar333No ratings yet
- Core Java NotesDocument56 pagesCore Java Notesraviteja_357No ratings yet
- PREFACE of Operating SystemsDocument4 pagesPREFACE of Operating SystemsAMIT RADHA KRISHNA NIGAMNo ratings yet
- 3 Mundlak Cavallo y Domenech 1990Document25 pages3 Mundlak Cavallo y Domenech 1990Candela Vazquez FernándezNo ratings yet
- Selection of Appropriate Software Development Life Cycle Using Fuzzy LogicDocument16 pagesSelection of Appropriate Software Development Life Cycle Using Fuzzy LogicTįtánìâ Rïyå-çhànNo ratings yet
- Flyer Powersource Motoweld-Rl350 e 02.2017Document8 pagesFlyer Powersource Motoweld-Rl350 e 02.2017Jorge Martinez PeraltaNo ratings yet
- Minggu 4 - Chapter 05 Present Worth Analysis - 12e XE-RevDocument36 pagesMinggu 4 - Chapter 05 Present Worth Analysis - 12e XE-RevAzizah FasyaNo ratings yet
- 12th Imp Topics Chapter WiseDocument4 pages12th Imp Topics Chapter WiserampriyachinNo ratings yet