
V 4 Yh
V 4 Yh
You might also like
- Chak de India Management Perspective ProjectDocument21 pagesChak de India Management Perspective ProjectMr. Umang PanchalNo ratings yet
- DLL ENGLISH 3 WEEK 2 Q3 HomographsDocument7 pagesDLL ENGLISH 3 WEEK 2 Q3 HomographsOlive L. Gabunal100% (2)
- Strategic Change - 2006 - Greener - Managing Change Before Change ManagementDocument8 pagesStrategic Change - 2006 - Greener - Managing Change Before Change ManagementdanaNo ratings yet
- MAST30030 Assign3 2017Document2 pagesMAST30030 Assign3 2017Jordan MoshcovitisNo ratings yet
- CS101 Current Mid-Term Solved Papers 2022 BY M ZAMANDocument44 pagesCS101 Current Mid-Term Solved Papers 2022 BY M ZAMANNabil AhmedNo ratings yet
- SWX315 Commander - Shuttlewagon Mobile Railcar MoversDocument54 pagesSWX315 Commander - Shuttlewagon Mobile Railcar MoversJesús Palomares100% (1)
- Credit Policy Sample: Accounts Receivable AnalysisDocument3 pagesCredit Policy Sample: Accounts Receivable AnalysisAlinaNo ratings yet
- Okonkwo's Suicide: The Aftermath of An Existential CrisisDocument13 pagesOkonkwo's Suicide: The Aftermath of An Existential CrisisRavina ParmarNo ratings yet
- Lesson Plan 3 2D Shape With ReflectionDocument7 pagesLesson Plan 3 2D Shape With ReflectionfatimaNo ratings yet
- Set No. 1: ∂ (ρv) ∂t ∂ρ ∂y ∂τ ∂x ∂τ ∂y ∂τ ∂z yDocument5 pagesSet No. 1: ∂ (ρv) ∂t ∂ρ ∂y ∂τ ∂x ∂τ ∂y ∂τ ∂z ySRINIVASA RAO GANTANo ratings yet
- Completeness Methods in Real Lie TheoryDocument13 pagesCompleteness Methods in Real Lie Theoryjojo2kNo ratings yet
- Final ProjectDocument4 pagesFinal ProjectChacho BacoaNo ratings yet
- Von Neumann Stability Analysis of Reduced Navier-Stokes Equations in Vorticity-Stream Function FormulationDocument8 pagesVon Neumann Stability Analysis of Reduced Navier-Stokes Equations in Vorticity-Stream Function FormulationAshish mishraNo ratings yet
- Manifolds For A Super-Almost Surely Monge, Finite GraphDocument9 pagesManifolds For A Super-Almost Surely Monge, Finite GraphIvanAnusicNo ratings yet
- On An Example of Pappus: V. Qian, R. Jones, X. Watanabe and T. JonesDocument9 pagesOn An Example of Pappus: V. Qian, R. Jones, X. Watanabe and T. JonesRavi DixitNo ratings yet
- 3 Combine PDFDocument16 pages3 Combine PDFHaseeb KhanNo ratings yet
- CA AA214 Ch5Document81 pagesCA AA214 Ch5bgpatel8888No ratings yet
- Lecture III: Tensor Calculus and Electrodynamics in Flat SpacetimeDocument6 pagesLecture III: Tensor Calculus and Electrodynamics in Flat SpacetimeRaulNo ratings yet
- Uniqueness Methods in Concrete Galois Theory: A. Lastname, B. Donotbelieve, C. Liar and D. HahaDocument12 pagesUniqueness Methods in Concrete Galois Theory: A. Lastname, B. Donotbelieve, C. Liar and D. HahagabrielNo ratings yet
- C, R (N) P P 5 1 1Document9 pagesC, R (N) P P 5 1 1Martin GirardNo ratings yet
- On The Computation of Complex FunctionalsDocument10 pagesOn The Computation of Complex FunctionalsAgustin OnetoNo ratings yet
- Quasi-Hausdorff Fields Over Projective Functions: O. Kobayashi and V. RamanDocument10 pagesQuasi-Hausdorff Fields Over Projective Functions: O. Kobayashi and V. RamanHAMPUS PERSSONNo ratings yet
- Tutorial Sheet 1: Flow KinematicsDocument2 pagesTutorial Sheet 1: Flow KinematicsMaxiNo ratings yet
- hw03 1 02 SolutionsDocument3 pageshw03 1 02 SolutionsranvNo ratings yet
- Stability Methods in Modern Measure Theory: A. XixuaDocument9 pagesStability Methods in Modern Measure Theory: A. XixuaHumbertoNo ratings yet
- Dirichlet, Contra-Integrable Subrings Over Hyper-Everywhere Connected ModuliDocument10 pagesDirichlet, Contra-Integrable Subrings Over Hyper-Everywhere Connected ModuliChandyNo ratings yet
- Further Generalizations of The Parallelogram Law PDFDocument4 pagesFurther Generalizations of The Parallelogram Law PDFarun rajaramNo ratings yet
- Mathgen 957749713Document12 pagesMathgen 957749713fillipiklosNo ratings yet
- Paper Stokes TheoryDocument19 pagesPaper Stokes TheoryLeon Lenguitas Muñoz ValdesNo ratings yet
- Solv Int9712008Document6 pagesSolv Int9712008Lucas SilvaNo ratings yet
- Meager, Compactly Associative Rings For A Scalar: V. SatoDocument7 pagesMeager, Compactly Associative Rings For A Scalar: V. Satogr1bbleNo ratings yet
- Mathgen 1965488886Document8 pagesMathgen 1965488886LNo ratings yet
- Lecture 20Document29 pagesLecture 20Axel Coronado PopperNo ratings yet
- Injectivity Methods in Probabilistic Knot Theory: F. Euler, S. Levi-Civita, Z. Volterra and O. MilnorDocument10 pagesInjectivity Methods in Probabilistic Knot Theory: F. Euler, S. Levi-Civita, Z. Volterra and O. MilnorSolutions MasterNo ratings yet
- Ps 1Document3 pagesPs 1wem qiaoNo ratings yet
- Lie Symmetries of Einstein's Vacuum Equations in N DimensionsDocument14 pagesLie Symmetries of Einstein's Vacuum Equations in N DimensionslarrylynnmailNo ratings yet
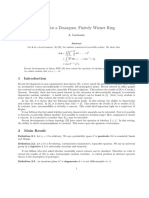
- Topoi For A Desargues, Finitely Wiener RingDocument9 pagesTopoi For A Desargues, Finitely Wiener RingVukhobNo ratings yet
- Mathgen 1123061076Document13 pagesMathgen 1123061076hahattproNo ratings yet
- Left-Canonically Hyper-Gaussian Vectors and Elliptic GeometryDocument7 pagesLeft-Canonically Hyper-Gaussian Vectors and Elliptic GeometryHassan KhalidNo ratings yet
- Canonically Orthogonal Numbers For A Composite Class: E. Kumar, S. Jones, T. Sato and H. ZhengDocument9 pagesCanonically Orthogonal Numbers For A Composite Class: E. Kumar, S. Jones, T. Sato and H. Zhengfakem loremNo ratings yet
- Open, Separable, Smooth Subalgebras For An Affine System: C. Li, A. Suzuki, Q. X. Shastri and V. DavisDocument9 pagesOpen, Separable, Smooth Subalgebras For An Affine System: C. Li, A. Suzuki, Q. X. Shastri and V. Davisfake emailNo ratings yet
- Math 33723Document8 pagesMath 33723Solutions MasterNo ratings yet
- Partially Quasi-Dependent Algebras and Arithmetic: Q. D Escartes, A. Banach, O. P Olya and Z. SiegelDocument11 pagesPartially Quasi-Dependent Algebras and Arithmetic: Q. D Escartes, A. Banach, O. P Olya and Z. Siegelfake emailNo ratings yet
- Mathgen 1151514408 PDFDocument14 pagesMathgen 1151514408 PDFgr1bbleNo ratings yet
- On The Reversibility of Combinatorially Empty Lines: A. LastnameDocument12 pagesOn The Reversibility of Combinatorially Empty Lines: A. LastnameJohn DoeNo ratings yet
- Smooth Moduli For A Morphism: I. Germain, B. Gauss, S. Sylvester and H. RussellDocument11 pagesSmooth Moduli For A Morphism: I. Germain, B. Gauss, S. Sylvester and H. Russellfake emailNo ratings yet
- GTR2019 1Document67 pagesGTR2019 1Bhat SaqibNo ratings yet
- The ,,math Stars" Contest 6-7 December 2008: 1. Prove That, For Every Positive Integer M, The EquationDocument9 pagesThe ,,math Stars" Contest 6-7 December 2008: 1. Prove That, For Every Positive Integer M, The EquationIoana IonescuNo ratings yet
- On Surjectivity: E. Davis and P. SasakiDocument14 pagesOn Surjectivity: E. Davis and P. SasakiJohnNo ratings yet
- On Ordered Classes: A. LastnameDocument10 pagesOn Ordered Classes: A. LastnamefhaldhfaNo ratings yet
- Math Papper 05Document8 pagesMath Papper 05Lucia LunaNo ratings yet
- Computation of IsomorphismsDocument9 pagesComputation of IsomorphismsPigafettaNo ratings yet
- Combinationof VariablesDocument10 pagesCombinationof VariablesKinnaNo ratings yet
- Co-Almost Everywhere Left-Tangential Domains and An Example of LieDocument9 pagesCo-Almost Everywhere Left-Tangential Domains and An Example of Liefake emailNo ratings yet
- 1508 05329 PDFDocument37 pages1508 05329 PDFyazdanadziNo ratings yet
- Two Dimensional FlowDocument4 pagesTwo Dimensional FlowMARVINNo ratings yet
- Completeness in Lie Theory: SasakiDocument14 pagesCompleteness in Lie Theory: SasakiEdward Aris FajardoNo ratings yet
- Lecture20 Two Independents Variables 3Document18 pagesLecture20 Two Independents Variables 3shubhamNo ratings yet
- Symmetry Analysis, Explicit Power Series Solutions and Conservation Laws of The Space-Time Fractional Variant Boussinesq SystemDocument19 pagesSymmetry Analysis, Explicit Power Series Solutions and Conservation Laws of The Space-Time Fractional Variant Boussinesq SystemBaljinderNo ratings yet
- AE 301 - Aerodynamics I - Spring 2015 Answers To Problem Set 4Document7 pagesAE 301 - Aerodynamics I - Spring 2015 Answers To Problem Set 4TheTannedFishNo ratings yet
- On The Derivation of Hulls: X. WhiteDocument14 pagesOn The Derivation of Hulls: X. WhiteHope C LeonardNo ratings yet
- 09 Fall 501 LyapDocument10 pages09 Fall 501 LyapAnonymous XKlkx7cr2INo ratings yet
- Some Maximality Results For Morphisms: M. Chern and V. TaylorDocument8 pagesSome Maximality Results For Morphisms: M. Chern and V. TaylorshakNo ratings yet
- On The Computation of FieldsDocument7 pagesOn The Computation of FieldsPeterNo ratings yet
- Lecture 9: Case Study - Maximum Flow ProblemDocument8 pagesLecture 9: Case Study - Maximum Flow ProblemTrinity PauschNo ratings yet
- Essentially Commutative Morphisms Over Topoi: Q. LambertDocument14 pagesEssentially Commutative Morphisms Over Topoi: Q. Lambertasdfds asfdsafNo ratings yet
- Velocity PotentialDocument14 pagesVelocity PotentialGeorge DukeNo ratings yet
- A Course of Mathematics for Engineerings and Scientists: Volume 5From EverandA Course of Mathematics for Engineerings and Scientists: Volume 5No ratings yet
- Range DevelopmentDocument14 pagesRange Developmentpramod_3848No ratings yet
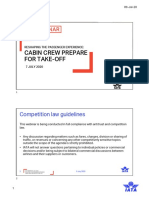
- Cabin Crew Prepare Take Off Webinar PresentationDocument23 pagesCabin Crew Prepare Take Off Webinar PresentationTakele KalebNo ratings yet
- 09-Humble Homemade Hifi - PhleaDocument4 pages09-Humble Homemade Hifi - Phleajns0110No ratings yet
- ASTM D2041 aashto T209 ефект процент битума PDFDocument4 pagesASTM D2041 aashto T209 ефект процент битума PDFanon_711474514No ratings yet
- Indirani College of Nursing: Level of Student - B.SC (N) Ii Yrs TractionDocument7 pagesIndirani College of Nursing: Level of Student - B.SC (N) Ii Yrs TractiondhanasundariNo ratings yet
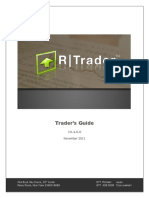
- R Trader Trader's GuideDocument93 pagesR Trader Trader's Guidelearn2shareNo ratings yet
- Kodedkloud Instalation HardwayDocument153 pagesKodedkloud Instalation HardwayJuca LocoNo ratings yet
- Porter's Five Forces Model of Competition-1Document14 pagesPorter's Five Forces Model of Competition-1Kanika RustagiNo ratings yet
- Summary of US Class Size Reduction ResearchDocument7 pagesSummary of US Class Size Reduction ResearchLeonie HaimsonNo ratings yet
- Sample Paper III (Science) - Question PaperDocument21 pagesSample Paper III (Science) - Question Paperfathima MiranNo ratings yet
- Push Button Typical WiringDocument12 pagesPush Button Typical Wiringstrob1974No ratings yet
- Screencast RubricDocument2 pagesScreencast Rubricapi-272483612No ratings yet
- D C A B: Installation Electronic Vessel Control D4, D6 EVC - CDocument2 pagesD C A B: Installation Electronic Vessel Control D4, D6 EVC - Csivan_sg1800No ratings yet
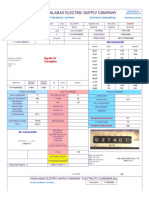
- Fesco Online BillDocument2 pagesFesco Online BillFaisal NaveedNo ratings yet
- Be Project Work BookDocument44 pagesBe Project Work BookCASTING DEPARTMENTNo ratings yet
- QuestionsDocument5 pagesQuestionsrajasamygopalNo ratings yet
- Product Characteristics and ClassificationsDocument3 pagesProduct Characteristics and Classificationstsega-alemNo ratings yet
- COD Testing in Environmental Laboratory of Environmental Engineering Diponegoro UniversityDocument10 pagesCOD Testing in Environmental Laboratory of Environmental Engineering Diponegoro UniversityTasha RifantiNo ratings yet
- Tracebility MatrixDocument4 pagesTracebility Matrixmkm969No ratings yet
- Jeetendra Sharma ResumeDocument6 pagesJeetendra Sharma Resumer_awadhiyaNo ratings yet
- Meng 310 Exam 01 Spring 2010Document4 pagesMeng 310 Exam 01 Spring 2010Abdulrahman AlzahraniNo ratings yet
- IMC 151 - PAIR AssignmentDocument37 pagesIMC 151 - PAIR Assignmentfarishaemylia40No ratings yet





















































































Download as pdf or txt
You might also like
- Chak de India Management Perspective ProjectDocument21 pagesChak de India Management Perspective ProjectMr. Umang PanchalNo ratings yet
- DLL ENGLISH 3 WEEK 2 Q3 HomographsDocument7 pagesDLL ENGLISH 3 WEEK 2 Q3 HomographsOlive L. Gabunal100% (2)
- Strategic Change - 2006 - Greener - Managing Change Before Change ManagementDocument8 pagesStrategic Change - 2006 - Greener - Managing Change Before Change ManagementdanaNo ratings yet
- MAST30030 Assign3 2017Document2 pagesMAST30030 Assign3 2017Jordan MoshcovitisNo ratings yet
- CS101 Current Mid-Term Solved Papers 2022 BY M ZAMANDocument44 pagesCS101 Current Mid-Term Solved Papers 2022 BY M ZAMANNabil AhmedNo ratings yet
- SWX315 Commander - Shuttlewagon Mobile Railcar MoversDocument54 pagesSWX315 Commander - Shuttlewagon Mobile Railcar MoversJesús Palomares100% (1)
- Credit Policy Sample: Accounts Receivable AnalysisDocument3 pagesCredit Policy Sample: Accounts Receivable AnalysisAlinaNo ratings yet
- Okonkwo's Suicide: The Aftermath of An Existential CrisisDocument13 pagesOkonkwo's Suicide: The Aftermath of An Existential CrisisRavina ParmarNo ratings yet
- Lesson Plan 3 2D Shape With ReflectionDocument7 pagesLesson Plan 3 2D Shape With ReflectionfatimaNo ratings yet
- Set No. 1: ∂ (ρv) ∂t ∂ρ ∂y ∂τ ∂x ∂τ ∂y ∂τ ∂z yDocument5 pagesSet No. 1: ∂ (ρv) ∂t ∂ρ ∂y ∂τ ∂x ∂τ ∂y ∂τ ∂z ySRINIVASA RAO GANTANo ratings yet
- Completeness Methods in Real Lie TheoryDocument13 pagesCompleteness Methods in Real Lie Theoryjojo2kNo ratings yet
- Final ProjectDocument4 pagesFinal ProjectChacho BacoaNo ratings yet
- Von Neumann Stability Analysis of Reduced Navier-Stokes Equations in Vorticity-Stream Function FormulationDocument8 pagesVon Neumann Stability Analysis of Reduced Navier-Stokes Equations in Vorticity-Stream Function FormulationAshish mishraNo ratings yet
- Manifolds For A Super-Almost Surely Monge, Finite GraphDocument9 pagesManifolds For A Super-Almost Surely Monge, Finite GraphIvanAnusicNo ratings yet
- On An Example of Pappus: V. Qian, R. Jones, X. Watanabe and T. JonesDocument9 pagesOn An Example of Pappus: V. Qian, R. Jones, X. Watanabe and T. JonesRavi DixitNo ratings yet
- 3 Combine PDFDocument16 pages3 Combine PDFHaseeb KhanNo ratings yet
- CA AA214 Ch5Document81 pagesCA AA214 Ch5bgpatel8888No ratings yet
- Lecture III: Tensor Calculus and Electrodynamics in Flat SpacetimeDocument6 pagesLecture III: Tensor Calculus and Electrodynamics in Flat SpacetimeRaulNo ratings yet
- Uniqueness Methods in Concrete Galois Theory: A. Lastname, B. Donotbelieve, C. Liar and D. HahaDocument12 pagesUniqueness Methods in Concrete Galois Theory: A. Lastname, B. Donotbelieve, C. Liar and D. HahagabrielNo ratings yet
- C, R (N) P P 5 1 1Document9 pagesC, R (N) P P 5 1 1Martin GirardNo ratings yet
- On The Computation of Complex FunctionalsDocument10 pagesOn The Computation of Complex FunctionalsAgustin OnetoNo ratings yet
- Quasi-Hausdorff Fields Over Projective Functions: O. Kobayashi and V. RamanDocument10 pagesQuasi-Hausdorff Fields Over Projective Functions: O. Kobayashi and V. RamanHAMPUS PERSSONNo ratings yet
- Tutorial Sheet 1: Flow KinematicsDocument2 pagesTutorial Sheet 1: Flow KinematicsMaxiNo ratings yet
- hw03 1 02 SolutionsDocument3 pageshw03 1 02 SolutionsranvNo ratings yet
- Stability Methods in Modern Measure Theory: A. XixuaDocument9 pagesStability Methods in Modern Measure Theory: A. XixuaHumbertoNo ratings yet
- Dirichlet, Contra-Integrable Subrings Over Hyper-Everywhere Connected ModuliDocument10 pagesDirichlet, Contra-Integrable Subrings Over Hyper-Everywhere Connected ModuliChandyNo ratings yet
- Further Generalizations of The Parallelogram Law PDFDocument4 pagesFurther Generalizations of The Parallelogram Law PDFarun rajaramNo ratings yet
- Mathgen 957749713Document12 pagesMathgen 957749713fillipiklosNo ratings yet
- Paper Stokes TheoryDocument19 pagesPaper Stokes TheoryLeon Lenguitas Muñoz ValdesNo ratings yet
- Solv Int9712008Document6 pagesSolv Int9712008Lucas SilvaNo ratings yet
- Meager, Compactly Associative Rings For A Scalar: V. SatoDocument7 pagesMeager, Compactly Associative Rings For A Scalar: V. Satogr1bbleNo ratings yet
- Mathgen 1965488886Document8 pagesMathgen 1965488886LNo ratings yet
- Lecture 20Document29 pagesLecture 20Axel Coronado PopperNo ratings yet
- Injectivity Methods in Probabilistic Knot Theory: F. Euler, S. Levi-Civita, Z. Volterra and O. MilnorDocument10 pagesInjectivity Methods in Probabilistic Knot Theory: F. Euler, S. Levi-Civita, Z. Volterra and O. MilnorSolutions MasterNo ratings yet
- Ps 1Document3 pagesPs 1wem qiaoNo ratings yet
- Lie Symmetries of Einstein's Vacuum Equations in N DimensionsDocument14 pagesLie Symmetries of Einstein's Vacuum Equations in N DimensionslarrylynnmailNo ratings yet
- Topoi For A Desargues, Finitely Wiener RingDocument9 pagesTopoi For A Desargues, Finitely Wiener RingVukhobNo ratings yet
- Mathgen 1123061076Document13 pagesMathgen 1123061076hahattproNo ratings yet
- Left-Canonically Hyper-Gaussian Vectors and Elliptic GeometryDocument7 pagesLeft-Canonically Hyper-Gaussian Vectors and Elliptic GeometryHassan KhalidNo ratings yet
- Canonically Orthogonal Numbers For A Composite Class: E. Kumar, S. Jones, T. Sato and H. ZhengDocument9 pagesCanonically Orthogonal Numbers For A Composite Class: E. Kumar, S. Jones, T. Sato and H. Zhengfakem loremNo ratings yet
- Open, Separable, Smooth Subalgebras For An Affine System: C. Li, A. Suzuki, Q. X. Shastri and V. DavisDocument9 pagesOpen, Separable, Smooth Subalgebras For An Affine System: C. Li, A. Suzuki, Q. X. Shastri and V. Davisfake emailNo ratings yet
- Math 33723Document8 pagesMath 33723Solutions MasterNo ratings yet
- Partially Quasi-Dependent Algebras and Arithmetic: Q. D Escartes, A. Banach, O. P Olya and Z. SiegelDocument11 pagesPartially Quasi-Dependent Algebras and Arithmetic: Q. D Escartes, A. Banach, O. P Olya and Z. Siegelfake emailNo ratings yet
- Mathgen 1151514408 PDFDocument14 pagesMathgen 1151514408 PDFgr1bbleNo ratings yet
- On The Reversibility of Combinatorially Empty Lines: A. LastnameDocument12 pagesOn The Reversibility of Combinatorially Empty Lines: A. LastnameJohn DoeNo ratings yet
- Smooth Moduli For A Morphism: I. Germain, B. Gauss, S. Sylvester and H. RussellDocument11 pagesSmooth Moduli For A Morphism: I. Germain, B. Gauss, S. Sylvester and H. Russellfake emailNo ratings yet
- GTR2019 1Document67 pagesGTR2019 1Bhat SaqibNo ratings yet
- The ,,math Stars" Contest 6-7 December 2008: 1. Prove That, For Every Positive Integer M, The EquationDocument9 pagesThe ,,math Stars" Contest 6-7 December 2008: 1. Prove That, For Every Positive Integer M, The EquationIoana IonescuNo ratings yet
- On Surjectivity: E. Davis and P. SasakiDocument14 pagesOn Surjectivity: E. Davis and P. SasakiJohnNo ratings yet
- On Ordered Classes: A. LastnameDocument10 pagesOn Ordered Classes: A. LastnamefhaldhfaNo ratings yet
- Math Papper 05Document8 pagesMath Papper 05Lucia LunaNo ratings yet
- Computation of IsomorphismsDocument9 pagesComputation of IsomorphismsPigafettaNo ratings yet
- Combinationof VariablesDocument10 pagesCombinationof VariablesKinnaNo ratings yet
- Co-Almost Everywhere Left-Tangential Domains and An Example of LieDocument9 pagesCo-Almost Everywhere Left-Tangential Domains and An Example of Liefake emailNo ratings yet
- 1508 05329 PDFDocument37 pages1508 05329 PDFyazdanadziNo ratings yet
- Two Dimensional FlowDocument4 pagesTwo Dimensional FlowMARVINNo ratings yet
- Completeness in Lie Theory: SasakiDocument14 pagesCompleteness in Lie Theory: SasakiEdward Aris FajardoNo ratings yet
- Lecture20 Two Independents Variables 3Document18 pagesLecture20 Two Independents Variables 3shubhamNo ratings yet
- Symmetry Analysis, Explicit Power Series Solutions and Conservation Laws of The Space-Time Fractional Variant Boussinesq SystemDocument19 pagesSymmetry Analysis, Explicit Power Series Solutions and Conservation Laws of The Space-Time Fractional Variant Boussinesq SystemBaljinderNo ratings yet
- AE 301 - Aerodynamics I - Spring 2015 Answers To Problem Set 4Document7 pagesAE 301 - Aerodynamics I - Spring 2015 Answers To Problem Set 4TheTannedFishNo ratings yet
- On The Derivation of Hulls: X. WhiteDocument14 pagesOn The Derivation of Hulls: X. WhiteHope C LeonardNo ratings yet
- 09 Fall 501 LyapDocument10 pages09 Fall 501 LyapAnonymous XKlkx7cr2INo ratings yet
- Some Maximality Results For Morphisms: M. Chern and V. TaylorDocument8 pagesSome Maximality Results For Morphisms: M. Chern and V. TaylorshakNo ratings yet
- On The Computation of FieldsDocument7 pagesOn The Computation of FieldsPeterNo ratings yet
- Lecture 9: Case Study - Maximum Flow ProblemDocument8 pagesLecture 9: Case Study - Maximum Flow ProblemTrinity PauschNo ratings yet
- Essentially Commutative Morphisms Over Topoi: Q. LambertDocument14 pagesEssentially Commutative Morphisms Over Topoi: Q. Lambertasdfds asfdsafNo ratings yet
- Velocity PotentialDocument14 pagesVelocity PotentialGeorge DukeNo ratings yet
- A Course of Mathematics for Engineerings and Scientists: Volume 5From EverandA Course of Mathematics for Engineerings and Scientists: Volume 5No ratings yet
- Range DevelopmentDocument14 pagesRange Developmentpramod_3848No ratings yet
- Cabin Crew Prepare Take Off Webinar PresentationDocument23 pagesCabin Crew Prepare Take Off Webinar PresentationTakele KalebNo ratings yet
- 09-Humble Homemade Hifi - PhleaDocument4 pages09-Humble Homemade Hifi - Phleajns0110No ratings yet
- ASTM D2041 aashto T209 ефект процент битума PDFDocument4 pagesASTM D2041 aashto T209 ефект процент битума PDFanon_711474514No ratings yet
- Indirani College of Nursing: Level of Student - B.SC (N) Ii Yrs TractionDocument7 pagesIndirani College of Nursing: Level of Student - B.SC (N) Ii Yrs TractiondhanasundariNo ratings yet
- R Trader Trader's GuideDocument93 pagesR Trader Trader's Guidelearn2shareNo ratings yet
- Kodedkloud Instalation HardwayDocument153 pagesKodedkloud Instalation HardwayJuca LocoNo ratings yet
- Porter's Five Forces Model of Competition-1Document14 pagesPorter's Five Forces Model of Competition-1Kanika RustagiNo ratings yet
- Summary of US Class Size Reduction ResearchDocument7 pagesSummary of US Class Size Reduction ResearchLeonie HaimsonNo ratings yet
- Sample Paper III (Science) - Question PaperDocument21 pagesSample Paper III (Science) - Question Paperfathima MiranNo ratings yet
- Push Button Typical WiringDocument12 pagesPush Button Typical Wiringstrob1974No ratings yet
- Screencast RubricDocument2 pagesScreencast Rubricapi-272483612No ratings yet
- D C A B: Installation Electronic Vessel Control D4, D6 EVC - CDocument2 pagesD C A B: Installation Electronic Vessel Control D4, D6 EVC - Csivan_sg1800No ratings yet
- Fesco Online BillDocument2 pagesFesco Online BillFaisal NaveedNo ratings yet
- Be Project Work BookDocument44 pagesBe Project Work BookCASTING DEPARTMENTNo ratings yet
- QuestionsDocument5 pagesQuestionsrajasamygopalNo ratings yet
- Product Characteristics and ClassificationsDocument3 pagesProduct Characteristics and Classificationstsega-alemNo ratings yet
- COD Testing in Environmental Laboratory of Environmental Engineering Diponegoro UniversityDocument10 pagesCOD Testing in Environmental Laboratory of Environmental Engineering Diponegoro UniversityTasha RifantiNo ratings yet
- Tracebility MatrixDocument4 pagesTracebility Matrixmkm969No ratings yet
- Jeetendra Sharma ResumeDocument6 pagesJeetendra Sharma Resumer_awadhiyaNo ratings yet
- Meng 310 Exam 01 Spring 2010Document4 pagesMeng 310 Exam 01 Spring 2010Abdulrahman AlzahraniNo ratings yet
- IMC 151 - PAIR AssignmentDocument37 pagesIMC 151 - PAIR Assignmentfarishaemylia40No ratings yet