Download as pdf or txt
You might also like
- Discuss 3Document14 pagesDiscuss 3vaNo ratings yet
- Documents - Tips - Final Draft Thermo000 PDFDocument222 pagesDocuments - Tips - Final Draft Thermo000 PDFYoshua Martel Candava77% (13)
- Lecture 6: Introduction To Linear Dynamical Systems and ODE ReviewDocument12 pagesLecture 6: Introduction To Linear Dynamical Systems and ODE ReviewBabiiMuffinkNo ratings yet
- Lecture 6: Introduction To Linear Dynamical Systems and ODE ReviewDocument13 pagesLecture 6: Introduction To Linear Dynamical Systems and ODE ReviewBabiiMuffinkNo ratings yet
- 14.1 Differential Equations: DefinitionsDocument52 pages14.1 Differential Equations: DefinitionsDaniel Lee Eisenberg JacobsNo ratings yet
- 3 4 PontryaginDocument36 pages3 4 PontryaginAbdesselem BoulkrouneNo ratings yet
- Solution of The Wave Equation by Separation of Variables: U T 2 U XDocument7 pagesSolution of The Wave Equation by Separation of Variables: U T 2 U XSreejith JithuNo ratings yet
- CMDE Volume 6 Issue 4 Pages 411-425Document15 pagesCMDE Volume 6 Issue 4 Pages 411-425Antonio Torres PeñaNo ratings yet
- Lecture6 06Document7 pagesLecture6 06dries siehersmaNo ratings yet
- Periodic Solutions of Nonautonomous Ordinary Differential EquationsDocument18 pagesPeriodic Solutions of Nonautonomous Ordinary Differential EquationsAntonio Torres PeñaNo ratings yet
- Oscillation of Second Order Nonlinear Neutral Differential Equations With Mixed Neutral TermDocument10 pagesOscillation of Second Order Nonlinear Neutral Differential Equations With Mixed Neutral TermRobin Achmad KurenaiNo ratings yet
- Cones Jfa PDFDocument24 pagesCones Jfa PDFMauricio DuarteNo ratings yet
- Diff. Eqn (MTL102) Complete NotesDocument62 pagesDiff. Eqn (MTL102) Complete NotesshutterparabellumNo ratings yet
- Bounded Positive Solutions of Nonlinear Second-Order Differential EquationsDocument11 pagesBounded Positive Solutions of Nonlinear Second-Order Differential EquationsAsmaNo ratings yet
- H2-Optimal Control - Lec8Document83 pagesH2-Optimal Control - Lec8stara123warNo ratings yet
- Results About Heat EquationsDocument7 pagesResults About Heat EquationsAdi SubbuNo ratings yet
- Randomization of Affine Diffusion ProcessesDocument40 pagesRandomization of Affine Diffusion ProcessesBartosz BieganowskiNo ratings yet
- 2017optimalcontrol Solution AprilDocument4 pages2017optimalcontrol Solution Aprilenrico.michelatoNo ratings yet
- Principles of CommunicationDocument42 pagesPrinciples of CommunicationSachin DoddamaniNo ratings yet
- PDE Elementary PDE TextDocument152 pagesPDE Elementary PDE TextThumper KatesNo ratings yet
- 1 Heat Equation On The Infinite Domain: Weston Barger July 27, 2016Document9 pages1 Heat Equation On The Infinite Domain: Weston Barger July 27, 2016ranvNo ratings yet
- Homework 8: Ha Pham November 20, 2008Document5 pagesHomework 8: Ha Pham November 20, 2008Mainak SamantaNo ratings yet
- Open Mathematics) Weak Solutions and Optimal Controls of Stochastic Fractional Reaction-Diffusion SystemsDocument15 pagesOpen Mathematics) Weak Solutions and Optimal Controls of Stochastic Fractional Reaction-Diffusion Systems2428452058No ratings yet
- A Note On The Perron Instability Theorem: Una Nota Sobre El Teorema de Inestabilidad de PerronDocument8 pagesA Note On The Perron Instability Theorem: Una Nota Sobre El Teorema de Inestabilidad de PerronRICARDO LUCIO MAMANI SUCANo ratings yet
- Answer 2016Document8 pagesAnswer 2016John ChanNo ratings yet
- 1D/ First Order Odes: Koushik Viswanathan August 28, 2019Document18 pages1D/ First Order Odes: Koushik Viswanathan August 28, 2019Abhiyan PaudelNo ratings yet
- Equivalenceof StateModelsDocument7 pagesEquivalenceof StateModelsSn ProfNo ratings yet
- An Introduction To Mathematical OptimalDocument126 pagesAn Introduction To Mathematical OptimalMauro VasconcellosNo ratings yet
- Generalización Del Teorema de DarboDocument10 pagesGeneralización Del Teorema de DarbowilmerNo ratings yet
- FIS-502: Mathematical Physics I: Assignment 6Document4 pagesFIS-502: Mathematical Physics I: Assignment 6Tanya0% (1)
- Matrices A: (T) Depending On A Parameter TDocument4 pagesMatrices A: (T) Depending On A Parameter TXiaoqin ZhouNo ratings yet
- Communications On Pure and Applied Analysis Volume 6, Number 1, March 2007Document20 pagesCommunications On Pure and Applied Analysis Volume 6, Number 1, March 2007Mouhcine AsNo ratings yet
- Linear System TheoryDocument62 pagesLinear System TheoryadhomeworkNo ratings yet
- Ejde 07Document12 pagesEjde 07Gustavo BalNo ratings yet
- Mertens Summation by PartsDocument6 pagesMertens Summation by Partsсимплектик геометрияNo ratings yet
- Identification and EstimationDocument37 pagesIdentification and EstimationSam KhanNo ratings yet
- FIN511 Notes: 1 Mathematical Base of Continuous Time Stochastic MethodsDocument33 pagesFIN511 Notes: 1 Mathematical Base of Continuous Time Stochastic MethodsdamnedchildNo ratings yet
- Oscillation of Nonlinear Neutral Delay Differential Equations PDFDocument20 pagesOscillation of Nonlinear Neutral Delay Differential Equations PDFKulin DaveNo ratings yet
- Stochastic Differential Equations: Florian Herzog 2010Document64 pagesStochastic Differential Equations: Florian Herzog 2010Alexandru GavrilescuNo ratings yet
- MIT18 152F11 Lec 03Document4 pagesMIT18 152F11 Lec 03Sujata SarkarNo ratings yet
- Pdes Iii (Hyperbolic Equations) : Phys 535Document53 pagesPdes Iii (Hyperbolic Equations) : Phys 535raul yondoNo ratings yet
- MinimumjerkDocument11 pagesMinimumjerkSamir BachirNo ratings yet
- Nonlinear Control Theory: Introduction To Dynamical SystemsDocument43 pagesNonlinear Control Theory: Introduction To Dynamical SystemsChernet TugeNo ratings yet
- Lec8h2 OptimalControl PDFDocument83 pagesLec8h2 OptimalControl PDFAnonymous WkbmWCa8MNo ratings yet
- Lecture 4: Least SquaresDocument7 pagesLecture 4: Least Squaresbillie quantNo ratings yet
- DSP FormulaDocument2 pagesDSP Formuladangtran_namNo ratings yet
- Advanced Quantum Mechanics, Fall 2017 Assignment 2 (Path Integrals in Quantum Mechanics)Document3 pagesAdvanced Quantum Mechanics, Fall 2017 Assignment 2 (Path Integrals in Quantum Mechanics)Anonymous tjckgoWNeNo ratings yet
- Space Curves 1Document12 pagesSpace Curves 1John KimaniNo ratings yet
- Montaner Munch FirstOrder2018Document29 pagesMontaner Munch FirstOrder2018Santiago Montaner GarcíaNo ratings yet
- Subharmonic Solutions of Bounded Coupled Hamiltonian Systems With Sublinear GrowthDocument18 pagesSubharmonic Solutions of Bounded Coupled Hamiltonian Systems With Sublinear GrowthQian DingbianNo ratings yet
- Topic 054 Linear Operators: Operator: in The Case of Vector Spaces and in Particular NormedDocument28 pagesTopic 054 Linear Operators: Operator: in The Case of Vector Spaces and in Particular NormedAsmara ChNo ratings yet
- Opuscula Math 3205 PDFDocument8 pagesOpuscula Math 3205 PDFAntonio Torres PeñaNo ratings yet
- ELEN3012 - 2020 Part 1Document6 pagesELEN3012 - 2020 Part 1Bongani MofokengNo ratings yet
- Rabies ModelDocument12 pagesRabies Modelarajara16No ratings yet
- Lecture FloquetDocument4 pagesLecture FloquetSaid SaidNo ratings yet
- Mathematics: The Extremal Solution To Conformable Fractional Differential Equations Involving Integral Boundary ConditionDocument9 pagesMathematics: The Extremal Solution To Conformable Fractional Differential Equations Involving Integral Boundary ConditionHumairoh AnNo ratings yet
- AA278A Lecture Notes 8. Optimal Control and Dynamic Games: Claire J. Tomlin May 11, 2005Document12 pagesAA278A Lecture Notes 8. Optimal Control and Dynamic Games: Claire J. Tomlin May 11, 2005Abdoulaye CisseNo ratings yet
- 1 Restri C Oes de Igualdade e DesigualdadeDocument13 pages1 Restri C Oes de Igualdade e DesigualdadeMoisésRodriguesNo ratings yet
- Tustin's Method For Final State Approximation of Conservative Dynamical SystemsDocument6 pagesTustin's Method For Final State Approximation of Conservative Dynamical SystemsRedkit ofFootHillNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Fire Safety Basic Series Flyer TB1Document1 pageFire Safety Basic Series Flyer TB1Kj_bdNo ratings yet
- Ibtphem Course Flyer and Application 2020Document3 pagesIbtphem Course Flyer and Application 2020Kj_bdNo ratings yet
- Functional Upgrade: SiemensDocument1 pageFunctional Upgrade: SiemensKj_bdNo ratings yet
- E1 NLPDocument2 pagesE1 NLPKj_bdNo ratings yet
- 802Document29 pages802Kj_bdNo ratings yet
- Lecture Note 2: Configuration Space: ECE5463: Introduction To RoboticsDocument19 pagesLecture Note 2: Configuration Space: ECE5463: Introduction To RoboticsKj_bdNo ratings yet
- Positioner Set Up & Calibration: Dyna-Flo Control Valve Services LTDDocument1 pagePositioner Set Up & Calibration: Dyna-Flo Control Valve Services LTDKj_bdNo ratings yet
- Siemens Overview For Factory Mounted Ps2'S: Figure 7 Display WindowDocument1 pageSiemens Overview For Factory Mounted Ps2'S: Figure 7 Display WindowKj_bdNo ratings yet
- Positioner Set Up & Calibration: Dyna-Flo Control Valve Services LTDDocument1 pagePositioner Set Up & Calibration: Dyna-Flo Control Valve Services LTDKj_bdNo ratings yet
- Application of Geographical Information System (GIS) Technology in The Control of Buruli Ulcer in GhanaDocument9 pagesApplication of Geographical Information System (GIS) Technology in The Control of Buruli Ulcer in GhanaKj_bdNo ratings yet
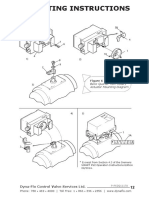
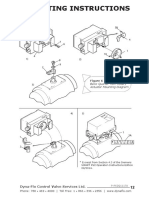
- Mounting Instructions: Basic Quarter Turn Rotary Actuator Mounting DiagramDocument1 pageMounting Instructions: Basic Quarter Turn Rotary Actuator Mounting DiagramKj_bdNo ratings yet
- Siemens Overview For Factory Mounted Ps2'SDocument1 pageSiemens Overview For Factory Mounted Ps2'SKj_bdNo ratings yet
- Siemens PS2: Installation and F.A.Q.'SDocument1 pageSiemens PS2: Installation and F.A.Q.'SKj_bdNo ratings yet
- Mounting Instructions: Basic Quarter Turn Rotary Actuator Mounting DiagramDocument1 pageMounting Instructions: Basic Quarter Turn Rotary Actuator Mounting DiagramKj_bdNo ratings yet
- 9758-Article Text-17770-2-10-20190313Document15 pages9758-Article Text-17770-2-10-20190313Kj_bdNo ratings yet
- Siemens PS2: Installation and F.A.Q.'SDocument1 pageSiemens PS2: Installation and F.A.Q.'SKj_bdNo ratings yet
- Osha UthmDocument19 pagesOsha UthmWan Muhammad Faiz Bin Mohd RoslanNo ratings yet
- TAJMAHALDocument17 pagesTAJMAHALNAGPAL COMMERCIAL CENTERNo ratings yet
- DILO SF6 Catalogue 2021 ENDocument214 pagesDILO SF6 Catalogue 2021 ENBadraa BatorgilNo ratings yet
- Problems of Iron and Steel Industry in India:: Swot Analysis StrengthDocument4 pagesProblems of Iron and Steel Industry in India:: Swot Analysis StrengthAnonymous hmd3jXd4No ratings yet
- Resource Tracking Scenario For SAP Transportation Management PDFDocument30 pagesResource Tracking Scenario For SAP Transportation Management PDFsaptmNo ratings yet
- Holux GPSport 260 ProDocument123 pagesHolux GPSport 260 ProskarkopNo ratings yet
- TR2231 AVEVA Plant CAD Model Requirements Ver4Document29 pagesTR2231 AVEVA Plant CAD Model Requirements Ver4ASIMNo ratings yet
- Sat Iii: Saturation Diving SystemDocument2 pagesSat Iii: Saturation Diving SystemJahel LootiNo ratings yet
- Isotrend Ir 192 Brochure PDFDocument2 pagesIsotrend Ir 192 Brochure PDFSafiq UddinNo ratings yet
- (5am - Ielts) - IELTS Academic Writing Task 1 Forecast 2022Document104 pages(5am - Ielts) - IELTS Academic Writing Task 1 Forecast 2022Nhân HồNo ratings yet
- Aip 2023 2 3Document29 pagesAip 2023 2 3menchiemanaloNo ratings yet
- 16 RMM Spring Edition 2020 Solutions CompressedDocument83 pages16 RMM Spring Edition 2020 Solutions CompressedKhokon GayenNo ratings yet
- Bodybuilder Wiring Cummins IslDocument16 pagesBodybuilder Wiring Cummins IslHamilton MirandaNo ratings yet
- Blouse Body Measurement ChartDocument2 pagesBlouse Body Measurement ChartScarletBeauty Enriquez-DiagbelNo ratings yet
- Application of Digital RadiographyDocument13 pagesApplication of Digital RadiographyFred LeviNo ratings yet
- Describe Image TemplatesDocument2 pagesDescribe Image TemplatesGanesh prasad AdhikariNo ratings yet
- Energy Utilization and Audit: Chemical Engineering Dept. Wolkite UniversityDocument14 pagesEnergy Utilization and Audit: Chemical Engineering Dept. Wolkite UniversityGetasew TesfaNo ratings yet
- MEO Class 1 ProjectDocument2 pagesMEO Class 1 ProjectAshish Ranjan0% (1)
- First of All Praise and Gratitude To The Presence of Allah SWTDocument2 pagesFirst of All Praise and Gratitude To The Presence of Allah SWTMuhammad Firmal KusyandiNo ratings yet
- Iveco EUROCARGO RANGEDocument3 pagesIveco EUROCARGO RANGEChe VarianNo ratings yet
- Cross 1987 Catecholamines LympohcytesDocument7 pagesCross 1987 Catecholamines LympohcytesMartin BadovNo ratings yet
- A - Review - On - Palm - Oil-Based - Nanofluids - As - A - Future - Resource - For - Green - Transformer - Insulation - SystemDocument24 pagesA - Review - On - Palm - Oil-Based - Nanofluids - As - A - Future - Resource - For - Green - Transformer - Insulation - Systemshameem siddiqueNo ratings yet
- Steel Grades 2 PDFDocument2 pagesSteel Grades 2 PDFcanakyuz0% (1)
- 2N60 PDFDocument7 pages2N60 PDFFady HachemNo ratings yet
- GRILL StationDocument19 pagesGRILL Stationradwa.talaatNo ratings yet
- Technical Schedule 3Document16 pagesTechnical Schedule 3Prasenjit DeyNo ratings yet
- Mech PDFDocument9 pagesMech PDFgurusamyNo ratings yet
- JBL PRX715/230: Technical ManualDocument4 pagesJBL PRX715/230: Technical ManualDanny Boysie50% (2)
- Simulation Models in Industrial Engineering: Random-Variate GenerationDocument18 pagesSimulation Models in Industrial Engineering: Random-Variate GenerationManhNo ratings yet