
Code PPC
Code PPC
You might also like
- Electronic Code LockDocument4 pagesElectronic Code LockVishal Kottarathil100% (9)
- OpenFOAM WingmotionDocument81 pagesOpenFOAM WingmotionMason925No ratings yet
- Code Arduino - Rfid - GSMDocument12 pagesCode Arduino - Rfid - GSMC SYAHBANANo ratings yet
- Door Lock Security System - InoDocument4 pagesDoor Lock Security System - InoRommel LedesmaNo ratings yet
- Coding PtaDocument3 pagesCoding Ptahasif haikal hazrulNo ratings yet
- 2Document8 pages2firdaus roshidiNo ratings yet
- Tasks CaDocument5 pagesTasks CaSoftec TechnologyNo ratings yet
- Conter CodeDocument3 pagesConter Codehii MCNo ratings yet
- Rfid Based Lock DoorDocument7 pagesRfid Based Lock DoorPisj Belongs To WhatsappNo ratings yet
- Code 123Document2 pagesCode 123Thăng TrầnNo ratings yet
- Arduino Capteur Qualite Air Mq135Document2 pagesArduino Capteur Qualite Air Mq135Cabrel TchoffoNo ratings yet
- Cerradura Con Huella DigitalDocument32 pagesCerradura Con Huella DigitalFreddy EspejoNo ratings yet
- ARDUINODocument5 pagesARDUINOKevin Wladimir ColumbaNo ratings yet
- Code Snippet 1Document1 pageCode Snippet 1Sriyani BenkiNo ratings yet
- Assignment#7Document4 pagesAssignment#7liquidmoon1973100% (2)
- ES1113 Fundamental of Automation Engineering II Lab Activity - 8Document11 pagesES1113 Fundamental of Automation Engineering II Lab Activity - 8Vaibhav GoelNo ratings yet
- Programación de Prueba de Shield MiArduinoDocument9 pagesProgramación de Prueba de Shield MiArduinoIsaac Eduardo CardonaNo ratings yet
- Jobsheet 6 - TI2B - 07 - Dwi Suci AmliapdfDocument26 pagesJobsheet 6 - TI2B - 07 - Dwi Suci AmliapdfDwi SuciNo ratings yet
- Emoney Merchant LCD - InoDocument5 pagesEmoney Merchant LCD - InoAmmar SkelthonNo ratings yet
- Code FinalDocument3 pagesCode FinalLucille AtilloNo ratings yet
- Rangkaian DHTDocument5 pagesRangkaian DHTlenstra.modNo ratings yet
- RfidDocument3 pagesRfidNATARAJANNo ratings yet
- DocxDocument9 pagesDocxCường TrầnNo ratings yet
- SketchDocument1 pageSketchfarice2339No ratings yet
- Sumire Respaldo 6-30Document2 pagesSumire Respaldo 6-30francisco.ruizs.2023No ratings yet
- LiquidCrystal LibraryDocument7 pagesLiquidCrystal LibraryAlgi FaryNo ratings yet
- Atmega16 v2Document10 pagesAtmega16 v2Aan MarufNo ratings yet
- PIRCODEDocument13 pagesPIRCODEJohn Errol MergalNo ratings yet
- Martin Adi Nugraha - 118170053 - UAS MekatronikaDocument11 pagesMartin Adi Nugraha - 118170053 - UAS MekatronikaAyu FerozaNo ratings yet
- Codigo Arduino Entrada e SaidaDocument2 pagesCodigo Arduino Entrada e SaidamilongoalfredoNo ratings yet
- Real CodeDocument1 pageReal CodeRahul SinghNo ratings yet
- Codigo Prog de ModulosDocument2 pagesCodigo Prog de ModulosJulio Cesar Pampa MamaniNo ratings yet
- Iot External FinalDocument24 pagesIot External FinalAbdul MuqtadirNo ratings yet
- MutuacodeDocument5 pagesMutuacodeBerheNo ratings yet
- RFID Servo Skematik Dan CodingDocument3 pagesRFID Servo Skematik Dan CodingBagusEkaKrisnaNo ratings yet
- Fire WarningDocument4 pagesFire WarningSharifah Nur LiyanaNo ratings yet
- Connexion With SD Card Module - Nadjet BenzahraDocument6 pagesConnexion With SD Card Module - Nadjet BenzahraDan BiNo ratings yet
- PDF 20231109 171811 0000Document28 pagesPDF 20231109 171811 0000duttbhuwan2020No ratings yet
- Arduino Uno Based Programming Examples - To Be Shared To StudentsDocument11 pagesArduino Uno Based Programming Examples - To Be Shared To Studentsmrunalpadmakar67No ratings yet
- Ca TaskDocument2 pagesCa TaskHumayun Khalid100% (1)
- Temperature Sensor Program CodeDocument6 pagesTemperature Sensor Program CodeJay Ann SaleNo ratings yet
- Evm Code Tinkercad 1Document4 pagesEvm Code Tinkercad 1mahzaibshah23No ratings yet
- Notes LCD FingerprintDocument2 pagesNotes LCD FingerprintDoni RanggaNo ratings yet
- ES Experiment No. 05 B-10Document5 pagesES Experiment No. 05 B-10Shubham PatilNo ratings yet
- Lab 2 LCD SdramDocument10 pagesLab 2 LCD SdramRajesh KannaNo ratings yet
- Tutorial Module RFID Reader RC522Document9 pagesTutorial Module RFID Reader RC522Mihai Bogdan100% (2)
- Bahan Asisten PraktikumDocument2 pagesBahan Asisten PraktikumAnwar USNo ratings yet
- Program Sementara Tugas Akhir SensorDocument3 pagesProgram Sementara Tugas Akhir SensorfadhirurohprastiwiNo ratings yet
- Digital Temperature Meter Using PIC16F688Document3 pagesDigital Temperature Meter Using PIC16F688Bhuvaneswaran VutwobwnNo ratings yet
- Modul 2Document4 pagesModul 2AjiNo ratings yet
- CodeDocument8 pagesCodeSohaib KhanNo ratings yet
- Smart Dustbin Using Ultrasonic SensorDocument2 pagesSmart Dustbin Using Ultrasonic SensorAbdallaNo ratings yet
- All Sensor CodeDocument12 pagesAll Sensor CodeEnchantressNo ratings yet
- Lesson Nr.17-WPS OfficeDocument4 pagesLesson Nr.17-WPS OfficeFika StephaneNo ratings yet
- Assignment 2 - SE1804Document3 pagesAssignment 2 - SE1804monlovetosleep7569No ratings yet
- Project CodeDocument4 pagesProject CodeVikramNo ratings yet
- dsPIC Microcontroller PDFDocument19 pagesdsPIC Microcontroller PDFSỹ RonNo ratings yet
- LCD ShieldDocument13 pagesLCD ShieldLoiDaNoiNo ratings yet
- STM32 ADC+2x16 LCD Keil Code.Document6 pagesSTM32 ADC+2x16 LCD Keil Code.MH 108812No ratings yet
- Making PIC Microcontroller Instruments and ControllersFrom EverandMaking PIC Microcontroller Instruments and ControllersNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- JuVzr7dTmeaYZin6sGuT - Auto CAD 2D Part 1 50 MCQ CEXAMINDIADocument7 pagesJuVzr7dTmeaYZin6sGuT - Auto CAD 2D Part 1 50 MCQ CEXAMINDIAAbhilash RawatNo ratings yet
- Rakesh Ranjan Yadav Sbi NoticeDocument8 pagesRakesh Ranjan Yadav Sbi NoticeRajveer ParmarNo ratings yet
- The Tools of Owatatsumi Japan's Ocean Surveillance and Coastal Defence CapabilitiesDocument162 pagesThe Tools of Owatatsumi Japan's Ocean Surveillance and Coastal Defence CapabilitiesarashNo ratings yet
- Abstract - : (Type Text)Document43 pagesAbstract - : (Type Text)Roshanil kambleNo ratings yet
- Performance of Heat ExchangersDocument10 pagesPerformance of Heat ExchangersJusztinAquinoNo ratings yet
- Department of The Navy: Approving Official (Ao) Citidirect Desk GuideDocument77 pagesDepartment of The Navy: Approving Official (Ao) Citidirect Desk GuideDavid GarciaNo ratings yet
- 05a APP751A OverUnderfrequencyProt r1Document12 pages05a APP751A OverUnderfrequencyProt r1hendra setiawanNo ratings yet
- Oper - 69NT40-511-345 To-399Document121 pagesOper - 69NT40-511-345 To-399cloviskrellingNo ratings yet
- Reportable Occurence CAAM 2019 PDFDocument21 pagesReportable Occurence CAAM 2019 PDFAmbas NelusNo ratings yet
- 060105-UK Water DescalerDocument1 page060105-UK Water DescalerOvidiu FratuNo ratings yet
- PGL-III-655: PGL-III-655 Is Made Features of Small Size, Drived by Battery, Special Safety Parts DesignDocument1 pagePGL-III-655: PGL-III-655 Is Made Features of Small Size, Drived by Battery, Special Safety Parts DesignSanjay PatilNo ratings yet
- OpenDSS Tutorial EPRI DuganDocument138 pagesOpenDSS Tutorial EPRI Dugankadri0moussa100% (3)
- TroubleshootingDocument6 pagesTroubleshootingNanang Al MunawarNo ratings yet
- Validation of Clean Rooms ForDocument53 pagesValidation of Clean Rooms ForUsman AslamNo ratings yet
- IOM - TSCS T Series API Spacer 6 Link Imperial Couplings PDFDocument12 pagesIOM - TSCS T Series API Spacer 6 Link Imperial Couplings PDFAlejandro CamposNo ratings yet
- Extended Abstract ExampleDocument3 pagesExtended Abstract ExampleHarzy Randhani Irdham100% (1)
- NilakottaiDocument3 pagesNilakottaiVijay PareekNo ratings yet
- Reduction in Average Cycle TimeDocument50 pagesReduction in Average Cycle TimeSean ColferdNo ratings yet
- Tia-222-G Objective and ScopeDocument1 pageTia-222-G Objective and Scopeicgrosso23No ratings yet
- TEAM CODE-7-03 in The Hon'Ble High Court of Hayati: Case No. 1Document25 pagesTEAM CODE-7-03 in The Hon'Ble High Court of Hayati: Case No. 1Atul LalNo ratings yet
- Non-Metallic Sheathed CableDocument21 pagesNon-Metallic Sheathed CableJeremiah Gonzales67% (3)
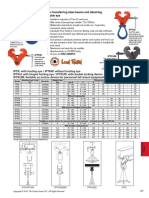
- For Transferring Steel Beams and Attaching Tackle Eye: IptkuDocument1 pageFor Transferring Steel Beams and Attaching Tackle Eye: IptkuKonstantinos SynodinosNo ratings yet
- Catalog of Throttle Body: Omp# Picture Oem No. Ref No. ApplicationDocument16 pagesCatalog of Throttle Body: Omp# Picture Oem No. Ref No. ApplicationLuiscas52No ratings yet
- House Keeping FinalDocument64 pagesHouse Keeping FinalgoodguNo ratings yet
- Setting Co-Ordination Chart & Graph Relay Setting Calculation 0.415 KV Panel - Ecr-2Document90 pagesSetting Co-Ordination Chart & Graph Relay Setting Calculation 0.415 KV Panel - Ecr-2susovan bIswasNo ratings yet
- How To Create Custom Excel Functions. User Defined Function (UDF) Examples FDocument4 pagesHow To Create Custom Excel Functions. User Defined Function (UDF) Examples FLidijaSpaseskaNo ratings yet
- Process Industry Practices Piping: PIP PNC00003 Process Unit and Offsites Layout GuideDocument15 pagesProcess Industry Practices Piping: PIP PNC00003 Process Unit and Offsites Layout GuideSunil Sawant100% (1)
- EntahDocument2 pagesEntahPramah DachiNo ratings yet
- Evolution of An EQ Design2Document9 pagesEvolution of An EQ Design2atiqulaNo ratings yet

























































































Download as pdf or txt
You might also like
- Electronic Code LockDocument4 pagesElectronic Code LockVishal Kottarathil100% (9)
- OpenFOAM WingmotionDocument81 pagesOpenFOAM WingmotionMason925No ratings yet
- Code Arduino - Rfid - GSMDocument12 pagesCode Arduino - Rfid - GSMC SYAHBANANo ratings yet
- Door Lock Security System - InoDocument4 pagesDoor Lock Security System - InoRommel LedesmaNo ratings yet
- Coding PtaDocument3 pagesCoding Ptahasif haikal hazrulNo ratings yet
- 2Document8 pages2firdaus roshidiNo ratings yet
- Tasks CaDocument5 pagesTasks CaSoftec TechnologyNo ratings yet
- Conter CodeDocument3 pagesConter Codehii MCNo ratings yet
- Rfid Based Lock DoorDocument7 pagesRfid Based Lock DoorPisj Belongs To WhatsappNo ratings yet
- Code 123Document2 pagesCode 123Thăng TrầnNo ratings yet
- Arduino Capteur Qualite Air Mq135Document2 pagesArduino Capteur Qualite Air Mq135Cabrel TchoffoNo ratings yet
- Cerradura Con Huella DigitalDocument32 pagesCerradura Con Huella DigitalFreddy EspejoNo ratings yet
- ARDUINODocument5 pagesARDUINOKevin Wladimir ColumbaNo ratings yet
- Code Snippet 1Document1 pageCode Snippet 1Sriyani BenkiNo ratings yet
- Assignment#7Document4 pagesAssignment#7liquidmoon1973100% (2)
- ES1113 Fundamental of Automation Engineering II Lab Activity - 8Document11 pagesES1113 Fundamental of Automation Engineering II Lab Activity - 8Vaibhav GoelNo ratings yet
- Programación de Prueba de Shield MiArduinoDocument9 pagesProgramación de Prueba de Shield MiArduinoIsaac Eduardo CardonaNo ratings yet
- Jobsheet 6 - TI2B - 07 - Dwi Suci AmliapdfDocument26 pagesJobsheet 6 - TI2B - 07 - Dwi Suci AmliapdfDwi SuciNo ratings yet
- Emoney Merchant LCD - InoDocument5 pagesEmoney Merchant LCD - InoAmmar SkelthonNo ratings yet
- Code FinalDocument3 pagesCode FinalLucille AtilloNo ratings yet
- Rangkaian DHTDocument5 pagesRangkaian DHTlenstra.modNo ratings yet
- RfidDocument3 pagesRfidNATARAJANNo ratings yet
- DocxDocument9 pagesDocxCường TrầnNo ratings yet
- SketchDocument1 pageSketchfarice2339No ratings yet
- Sumire Respaldo 6-30Document2 pagesSumire Respaldo 6-30francisco.ruizs.2023No ratings yet
- LiquidCrystal LibraryDocument7 pagesLiquidCrystal LibraryAlgi FaryNo ratings yet
- Atmega16 v2Document10 pagesAtmega16 v2Aan MarufNo ratings yet
- PIRCODEDocument13 pagesPIRCODEJohn Errol MergalNo ratings yet
- Martin Adi Nugraha - 118170053 - UAS MekatronikaDocument11 pagesMartin Adi Nugraha - 118170053 - UAS MekatronikaAyu FerozaNo ratings yet
- Codigo Arduino Entrada e SaidaDocument2 pagesCodigo Arduino Entrada e SaidamilongoalfredoNo ratings yet
- Real CodeDocument1 pageReal CodeRahul SinghNo ratings yet
- Codigo Prog de ModulosDocument2 pagesCodigo Prog de ModulosJulio Cesar Pampa MamaniNo ratings yet
- Iot External FinalDocument24 pagesIot External FinalAbdul MuqtadirNo ratings yet
- MutuacodeDocument5 pagesMutuacodeBerheNo ratings yet
- RFID Servo Skematik Dan CodingDocument3 pagesRFID Servo Skematik Dan CodingBagusEkaKrisnaNo ratings yet
- Fire WarningDocument4 pagesFire WarningSharifah Nur LiyanaNo ratings yet
- Connexion With SD Card Module - Nadjet BenzahraDocument6 pagesConnexion With SD Card Module - Nadjet BenzahraDan BiNo ratings yet
- PDF 20231109 171811 0000Document28 pagesPDF 20231109 171811 0000duttbhuwan2020No ratings yet
- Arduino Uno Based Programming Examples - To Be Shared To StudentsDocument11 pagesArduino Uno Based Programming Examples - To Be Shared To Studentsmrunalpadmakar67No ratings yet
- Ca TaskDocument2 pagesCa TaskHumayun Khalid100% (1)
- Temperature Sensor Program CodeDocument6 pagesTemperature Sensor Program CodeJay Ann SaleNo ratings yet
- Evm Code Tinkercad 1Document4 pagesEvm Code Tinkercad 1mahzaibshah23No ratings yet
- Notes LCD FingerprintDocument2 pagesNotes LCD FingerprintDoni RanggaNo ratings yet
- ES Experiment No. 05 B-10Document5 pagesES Experiment No. 05 B-10Shubham PatilNo ratings yet
- Lab 2 LCD SdramDocument10 pagesLab 2 LCD SdramRajesh KannaNo ratings yet
- Tutorial Module RFID Reader RC522Document9 pagesTutorial Module RFID Reader RC522Mihai Bogdan100% (2)
- Bahan Asisten PraktikumDocument2 pagesBahan Asisten PraktikumAnwar USNo ratings yet
- Program Sementara Tugas Akhir SensorDocument3 pagesProgram Sementara Tugas Akhir SensorfadhirurohprastiwiNo ratings yet
- Digital Temperature Meter Using PIC16F688Document3 pagesDigital Temperature Meter Using PIC16F688Bhuvaneswaran VutwobwnNo ratings yet
- Modul 2Document4 pagesModul 2AjiNo ratings yet
- CodeDocument8 pagesCodeSohaib KhanNo ratings yet
- Smart Dustbin Using Ultrasonic SensorDocument2 pagesSmart Dustbin Using Ultrasonic SensorAbdallaNo ratings yet
- All Sensor CodeDocument12 pagesAll Sensor CodeEnchantressNo ratings yet
- Lesson Nr.17-WPS OfficeDocument4 pagesLesson Nr.17-WPS OfficeFika StephaneNo ratings yet
- Assignment 2 - SE1804Document3 pagesAssignment 2 - SE1804monlovetosleep7569No ratings yet
- Project CodeDocument4 pagesProject CodeVikramNo ratings yet
- dsPIC Microcontroller PDFDocument19 pagesdsPIC Microcontroller PDFSỹ RonNo ratings yet
- LCD ShieldDocument13 pagesLCD ShieldLoiDaNoiNo ratings yet
- STM32 ADC+2x16 LCD Keil Code.Document6 pagesSTM32 ADC+2x16 LCD Keil Code.MH 108812No ratings yet
- Making PIC Microcontroller Instruments and ControllersFrom EverandMaking PIC Microcontroller Instruments and ControllersNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- JuVzr7dTmeaYZin6sGuT - Auto CAD 2D Part 1 50 MCQ CEXAMINDIADocument7 pagesJuVzr7dTmeaYZin6sGuT - Auto CAD 2D Part 1 50 MCQ CEXAMINDIAAbhilash RawatNo ratings yet
- Rakesh Ranjan Yadav Sbi NoticeDocument8 pagesRakesh Ranjan Yadav Sbi NoticeRajveer ParmarNo ratings yet
- The Tools of Owatatsumi Japan's Ocean Surveillance and Coastal Defence CapabilitiesDocument162 pagesThe Tools of Owatatsumi Japan's Ocean Surveillance and Coastal Defence CapabilitiesarashNo ratings yet
- Abstract - : (Type Text)Document43 pagesAbstract - : (Type Text)Roshanil kambleNo ratings yet
- Performance of Heat ExchangersDocument10 pagesPerformance of Heat ExchangersJusztinAquinoNo ratings yet
- Department of The Navy: Approving Official (Ao) Citidirect Desk GuideDocument77 pagesDepartment of The Navy: Approving Official (Ao) Citidirect Desk GuideDavid GarciaNo ratings yet
- 05a APP751A OverUnderfrequencyProt r1Document12 pages05a APP751A OverUnderfrequencyProt r1hendra setiawanNo ratings yet
- Oper - 69NT40-511-345 To-399Document121 pagesOper - 69NT40-511-345 To-399cloviskrellingNo ratings yet
- Reportable Occurence CAAM 2019 PDFDocument21 pagesReportable Occurence CAAM 2019 PDFAmbas NelusNo ratings yet
- 060105-UK Water DescalerDocument1 page060105-UK Water DescalerOvidiu FratuNo ratings yet
- PGL-III-655: PGL-III-655 Is Made Features of Small Size, Drived by Battery, Special Safety Parts DesignDocument1 pagePGL-III-655: PGL-III-655 Is Made Features of Small Size, Drived by Battery, Special Safety Parts DesignSanjay PatilNo ratings yet
- OpenDSS Tutorial EPRI DuganDocument138 pagesOpenDSS Tutorial EPRI Dugankadri0moussa100% (3)
- TroubleshootingDocument6 pagesTroubleshootingNanang Al MunawarNo ratings yet
- Validation of Clean Rooms ForDocument53 pagesValidation of Clean Rooms ForUsman AslamNo ratings yet
- IOM - TSCS T Series API Spacer 6 Link Imperial Couplings PDFDocument12 pagesIOM - TSCS T Series API Spacer 6 Link Imperial Couplings PDFAlejandro CamposNo ratings yet
- Extended Abstract ExampleDocument3 pagesExtended Abstract ExampleHarzy Randhani Irdham100% (1)
- NilakottaiDocument3 pagesNilakottaiVijay PareekNo ratings yet
- Reduction in Average Cycle TimeDocument50 pagesReduction in Average Cycle TimeSean ColferdNo ratings yet
- Tia-222-G Objective and ScopeDocument1 pageTia-222-G Objective and Scopeicgrosso23No ratings yet
- TEAM CODE-7-03 in The Hon'Ble High Court of Hayati: Case No. 1Document25 pagesTEAM CODE-7-03 in The Hon'Ble High Court of Hayati: Case No. 1Atul LalNo ratings yet
- Non-Metallic Sheathed CableDocument21 pagesNon-Metallic Sheathed CableJeremiah Gonzales67% (3)
- For Transferring Steel Beams and Attaching Tackle Eye: IptkuDocument1 pageFor Transferring Steel Beams and Attaching Tackle Eye: IptkuKonstantinos SynodinosNo ratings yet
- Catalog of Throttle Body: Omp# Picture Oem No. Ref No. ApplicationDocument16 pagesCatalog of Throttle Body: Omp# Picture Oem No. Ref No. ApplicationLuiscas52No ratings yet
- House Keeping FinalDocument64 pagesHouse Keeping FinalgoodguNo ratings yet
- Setting Co-Ordination Chart & Graph Relay Setting Calculation 0.415 KV Panel - Ecr-2Document90 pagesSetting Co-Ordination Chart & Graph Relay Setting Calculation 0.415 KV Panel - Ecr-2susovan bIswasNo ratings yet
- How To Create Custom Excel Functions. User Defined Function (UDF) Examples FDocument4 pagesHow To Create Custom Excel Functions. User Defined Function (UDF) Examples FLidijaSpaseskaNo ratings yet
- Process Industry Practices Piping: PIP PNC00003 Process Unit and Offsites Layout GuideDocument15 pagesProcess Industry Practices Piping: PIP PNC00003 Process Unit and Offsites Layout GuideSunil Sawant100% (1)
- EntahDocument2 pagesEntahPramah DachiNo ratings yet
- Evolution of An EQ Design2Document9 pagesEvolution of An EQ Design2atiqulaNo ratings yet