
11233-Article Text-30246-4-10-20191219
11233-Article Text-30246-4-10-20191219
You might also like
- Practical Guide To SAP Material LedgerDocument224 pagesPractical Guide To SAP Material LedgerMaurilio100% (5)
- Design of Automotive DifferentialDocument8 pagesDesign of Automotive DifferentialDeepak ChachraNo ratings yet
- Man GN PDF 6Document36 pagesMan GN PDF 6Adrian A UPD78% (9)
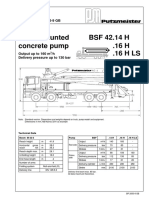
- Truck-Mounted BSF 42.14 H Concrete Pump .16 H .16 H LS: Data Sheet BP 2655-9 GBDocument2 pagesTruck-Mounted BSF 42.14 H Concrete Pump .16 H .16 H LS: Data Sheet BP 2655-9 GBAbdallah TarekNo ratings yet
- Subscriber MGMT Access NetworkDocument734 pagesSubscriber MGMT Access NetworkNelsonbohrNo ratings yet
- Dependencies of The Lead of Front Driving Wheels oDocument9 pagesDependencies of The Lead of Front Driving Wheels odharan511No ratings yet
- Differences in Tractor Performance Parameters Between Single-Wheel 4WD and Dual-Wheel 2WD Driving SystemsDocument11 pagesDifferences in Tractor Performance Parameters Between Single-Wheel 4WD and Dual-Wheel 2WD Driving SystemsLuis Alberto Garrido MendozaNo ratings yet
- Effects of Different Tire Configurations On Tractor Performance (#138475) - 119900Document8 pagesEffects of Different Tire Configurations On Tractor Performance (#138475) - 119900Caio GiarettaNo ratings yet
- Influence of Inflation Pressure in Tires On Traction Ratio 2Wd and 4Wd Driving Modes of TractorDocument8 pagesInfluence of Inflation Pressure in Tires On Traction Ratio 2Wd and 4Wd Driving Modes of TractorRavi VhtakarNo ratings yet
- Power Circulation in Driveline System When The WheDocument9 pagesPower Circulation in Driveline System When The WheAntonio GasparNo ratings yet
- Design of A Drivetrain For Sae Baja RaciDocument9 pagesDesign of A Drivetrain For Sae Baja Raciragavendra marimuthuNo ratings yet
- Computer Simulations To Maximise Fuel Efficiency and Work Performance of Agricultural Tractors in Rotovating and Ploughing OperationsDocument11 pagesComputer Simulations To Maximise Fuel Efficiency and Work Performance of Agricultural Tractors in Rotovating and Ploughing OperationsKhairulNo ratings yet
- Design Manufacturing Analysis of Differential Crown Gear and Pinion For MFWD AxleDocument8 pagesDesign Manufacturing Analysis of Differential Crown Gear and Pinion For MFWD AxleVinay Prasad NNo ratings yet
- Brake SystemDocument14 pagesBrake SystemvandanaharikumarNo ratings yet
- Study On Low-Speed Steering Resistance Torque of VDocument16 pagesStudy On Low-Speed Steering Resistance Torque of VDanilo RojasNo ratings yet
- Front-and-Rear-Wheel-Independent-Drive-Type Electric Vehicle (FRID EV) With Compatible Driving Performance and SafetyDocument10 pagesFront-and-Rear-Wheel-Independent-Drive-Type Electric Vehicle (FRID EV) With Compatible Driving Performance and Safetykkumaran32No ratings yet
- Recent Advances in Antilock Braking Systems and Traction Control SystemsDocument15 pagesRecent Advances in Antilock Braking Systems and Traction Control Systemsdavid_luzNo ratings yet
- The Primary Purpose of Agricultural TractorsDocument1 pageThe Primary Purpose of Agricultural TractorsBorlescu AndreiNo ratings yet
- Archive of SID: Design of A New Anti-Lock Braking System For MotorcyclesDocument9 pagesArchive of SID: Design of A New Anti-Lock Braking System For MotorcyclesIndra Chandra SetiawanNo ratings yet
- Auto WikiDocument313 pagesAuto WikijhpandiNo ratings yet
- Road Performance Curves: Acceleration, Gradability and Drawbar PullDocument83 pagesRoad Performance Curves: Acceleration, Gradability and Drawbar Pullpbd123autoNo ratings yet
- Vehicle DynamicsDocument17 pagesVehicle Dynamicsanwins85No ratings yet
- Design and Calculation of Planetary Transmission WDocument8 pagesDesign and Calculation of Planetary Transmission Wkarnail singh dhimanNo ratings yet
- Analysis of Loss Cost of Road Pavement Distress Due To Overloading Freight TransportationDocument16 pagesAnalysis of Loss Cost of Road Pavement Distress Due To Overloading Freight TransportationHeńřÿ ŁøĵæńNo ratings yet
- Suhane 2018Document10 pagesSuhane 2018Kylo RenNo ratings yet
- Power Losses and Energy Efficiency of Multi-Wheel Drive VehiclesDocument12 pagesPower Losses and Energy Efficiency of Multi-Wheel Drive VehiclesDeepak KayNo ratings yet
- Optimization of Key Parts of Front Suspension System of Three WheelerDocument6 pagesOptimization of Key Parts of Front Suspension System of Three WheelerDarmanNo ratings yet
- 5theory of ABS OperationDocument12 pages5theory of ABS Operationアン ヒNo ratings yet
- Maximum Engine Force Per Gear As Function of Vehicle Speed. This Particular Engine Has A Torque Limit of 400Nm and A Power Limit of 280hpDocument4 pagesMaximum Engine Force Per Gear As Function of Vehicle Speed. This Particular Engine Has A Torque Limit of 400Nm and A Power Limit of 280hpNIKASH maniNo ratings yet
- Pra Elementary Study Ride Semar-T Model: Proposal Tugas AkhirDocument30 pagesPra Elementary Study Ride Semar-T Model: Proposal Tugas AkhirDanang JoyoeNo ratings yet
- Gradeability For Automobiles: Akilesh YamsaniDocument7 pagesGradeability For Automobiles: Akilesh YamsaninrjmanitNo ratings yet
- Traction Tractor PerformanceDocument48 pagesTraction Tractor PerformanceSubhasis Mishra67% (3)
- Am 09 601 Vehicle DynamicsDocument104 pagesAm 09 601 Vehicle DynamicsMuhammed HussainNo ratings yet
- Operational and Design Parameters of Unified VehiclesDocument8 pagesOperational and Design Parameters of Unified VehiclesTJPRC PublicationsNo ratings yet
- Res ResDocument26 pagesRes ResEfjay LagdaNo ratings yet
- Tri Cycle DesignDocument7 pagesTri Cycle Designኩሉ ብኣምላኽ ኮነNo ratings yet
- DESIGN AND DEVELOPMENT OF A TRANSMISSION-with-cover-page-v2Document11 pagesDESIGN AND DEVELOPMENT OF A TRANSMISSION-with-cover-page-v2Maria Camila SantiagoNo ratings yet
- Tyre Report SampleDocument5 pagesTyre Report SampleArka PatraNo ratings yet
- Wheel Loader'S Penetration (Crowd) Force and Impacting FactorsDocument21 pagesWheel Loader'S Penetration (Crowd) Force and Impacting FactorsZahir KhiraNo ratings yet
- Motor Torque Calculations For Electric Vehicle PDFDocument2 pagesMotor Torque Calculations For Electric Vehicle PDFPasupuleti SivakumarNo ratings yet
- PowertrainDocument13 pagesPowertrainso.sorrounding factNo ratings yet
- The Study On The Damage-1Document10 pagesThe Study On The Damage-1Usman Effendi FendiNo ratings yet
- A Proposed Model For Optimizing The Drawbar Pull For Off-Road VehiclesDocument16 pagesA Proposed Model For Optimizing The Drawbar Pull For Off-Road VehiclesJonNo ratings yet
- Automotive ChassisDocument22 pagesAutomotive ChassisSathistrnpcNo ratings yet
- Brake Balance BAR: and Twin Master Cylinder Hydraulic Braking SystemDocument20 pagesBrake Balance BAR: and Twin Master Cylinder Hydraulic Braking SystemHasnain SaleemNo ratings yet
- Fem Tire Design and Analysis OfdurabilityDocument8 pagesFem Tire Design and Analysis OfdurabilityNavid AhadiNo ratings yet
- Differentials CompressedDocument8 pagesDifferentials CompressedMayur PanchalNo ratings yet
- Contributions Regarding The Study of The Braking System of CarsDocument7 pagesContributions Regarding The Study of The Braking System of Carswww.irjes.comNo ratings yet
- Efficient Farm Vehicles Tractor Tyre SelectionDocument4 pagesEfficient Farm Vehicles Tractor Tyre SelectionFrimpong Justice AlexNo ratings yet
- 7 - Field - Performance - of - An - Agricultural - Tractor - FitteDocument5 pages7 - Field - Performance - of - An - Agricultural - Tractor - FittemetaladhayNo ratings yet
- Ijmet 06 10 023Document11 pagesIjmet 06 10 023IAEME PublicationNo ratings yet
- Res ResDocument24 pagesRes ResEfjay LagdaNo ratings yet
- Automobile LayoutDocument11 pagesAutomobile Layoutsa_sherkarNo ratings yet
- Comparative Analysis of Motorcycle Braking Performance in Emergency SituationDocument9 pagesComparative Analysis of Motorcycle Braking Performance in Emergency SituationAk Kun FullNo ratings yet
- Types of Chassis LayoutDocument8 pagesTypes of Chassis LayoutMatthew SmithNo ratings yet
- Experiment No: 5: Automobile Engineering Lab (Me-408N)Document4 pagesExperiment No: 5: Automobile Engineering Lab (Me-408N)Vinay GirdharNo ratings yet
- Rolling Circumference Can Be Defined As The Distance A Tire Travels in One Revolution. Due ToDocument6 pagesRolling Circumference Can Be Defined As The Distance A Tire Travels in One Revolution. Due ToRavi TarunNo ratings yet
- Influence of The Tires Pressure in The Vehicle FuelDocument11 pagesInfluence of The Tires Pressure in The Vehicle FuelAdobe IlNo ratings yet
- Farm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsFrom EverandFarm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsNo ratings yet
- High Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsFrom EverandHigh Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsNo ratings yet
- Guide for Planning, Construction and Maintenance of Forest RoadsFrom EverandGuide for Planning, Construction and Maintenance of Forest RoadsNo ratings yet
- Filtri Landini PDFDocument59 pagesFiltri Landini PDFAndrei Mihai100% (1)
- Assignment 1Document9 pagesAssignment 1Smarajit MishraNo ratings yet
- Android-RD Services Integration Document V1.1.8Document22 pagesAndroid-RD Services Integration Document V1.1.8bksahu1194No ratings yet
- Lesson 2: 2.1. Safety Precautions in Plumbing Works and Plumbing InstrumentsDocument2 pagesLesson 2: 2.1. Safety Precautions in Plumbing Works and Plumbing InstrumentsYandi TVNo ratings yet
- One Angel Square, The Co-Operative Group HeadquartersDocument6 pagesOne Angel Square, The Co-Operative Group HeadquartersAyushree SharmaNo ratings yet
- 1 - Basics of CBs For Khandala SMDocument17 pages1 - Basics of CBs For Khandala SMnageswara_mutyalaNo ratings yet
- Chapter 1 1st HalfDocument5 pagesChapter 1 1st Halfandreicatapang563No ratings yet
- Saleem HDD 6Document2 pagesSaleem HDD 6Prince SaleemNo ratings yet
- Tema: Electromagnetic Compass Sensor MD 52 A: Mentor: Zoran Mikelić, Dipl. Ing. Kandidat: Vedran ŽuraDocument13 pagesTema: Electromagnetic Compass Sensor MD 52 A: Mentor: Zoran Mikelić, Dipl. Ing. Kandidat: Vedran ŽuramostarzadarNo ratings yet
- Operation Management (CBMEC2) : Module 1/lesson 2-3/week 2-3Document3 pagesOperation Management (CBMEC2) : Module 1/lesson 2-3/week 2-3Abijel PanizaNo ratings yet
- Ahnay Series: Bi-66-580 To Bi-66-600Document2 pagesAhnay Series: Bi-66-580 To Bi-66-600Eureka SolarNo ratings yet
- Unit 1 To 5 Qbank AnsDocument7 pagesUnit 1 To 5 Qbank AnsranganNo ratings yet
- 15 - HPL2010-EN. Transformadores PDFDocument20 pages15 - HPL2010-EN. Transformadores PDFphredlovNo ratings yet
- MES EbookDocument42 pagesMES EbookmsohaibkhalidNo ratings yet
- Aerospace Acronym and Abbreviation Guide - Avionics Magazine PDFDocument28 pagesAerospace Acronym and Abbreviation Guide - Avionics Magazine PDFAntonio Hernán Lora LuzNo ratings yet
- Database Management System LAB Final Q1Document20 pagesDatabase Management System LAB Final Q1Michelle EsperalNo ratings yet
- Charter - Testing Final-1-1Document29 pagesCharter - Testing Final-1-1Me BujjuNo ratings yet
- Stabila LAR-350 - ManualDocument32 pagesStabila LAR-350 - ManualJiCiNo ratings yet
- OS PPT 3-2Document28 pagesOS PPT 3-2drkhamuruddeenNo ratings yet
- Diesel EnginesDocument10 pagesDiesel EnginesQuang Pham100% (2)
- Key-Value Database - WikipediaDocument4 pagesKey-Value Database - WikipediaSofia SerraNo ratings yet
- PMMT Additional Notes: Project Management Unit 28 October 2011Document83 pagesPMMT Additional Notes: Project Management Unit 28 October 2011ayeshaarif3No ratings yet
- Epson TM-U220Document104 pagesEpson TM-U220Keith Kevin TabanaoNo ratings yet
- Pearl Smart City: Project FeaturesDocument7 pagesPearl Smart City: Project FeaturesVivek Dutt MajetiNo ratings yet
- Online Admission System User ManualDocument27 pagesOnline Admission System User ManualDizzyNo ratings yet
- El160.80.50 020 0343 00a PDFDocument17 pagesEl160.80.50 020 0343 00a PDFfreddyjoertyNo ratings yet
- FCT 1.2 - Fault Finding OverviewDocument11 pagesFCT 1.2 - Fault Finding Overviewdener.santosNo ratings yet

























































































Download as pdf or txt
You might also like
- Practical Guide To SAP Material LedgerDocument224 pagesPractical Guide To SAP Material LedgerMaurilio100% (5)
- Design of Automotive DifferentialDocument8 pagesDesign of Automotive DifferentialDeepak ChachraNo ratings yet
- Man GN PDF 6Document36 pagesMan GN PDF 6Adrian A UPD78% (9)
- Truck-Mounted BSF 42.14 H Concrete Pump .16 H .16 H LS: Data Sheet BP 2655-9 GBDocument2 pagesTruck-Mounted BSF 42.14 H Concrete Pump .16 H .16 H LS: Data Sheet BP 2655-9 GBAbdallah TarekNo ratings yet
- Subscriber MGMT Access NetworkDocument734 pagesSubscriber MGMT Access NetworkNelsonbohrNo ratings yet
- Dependencies of The Lead of Front Driving Wheels oDocument9 pagesDependencies of The Lead of Front Driving Wheels odharan511No ratings yet
- Differences in Tractor Performance Parameters Between Single-Wheel 4WD and Dual-Wheel 2WD Driving SystemsDocument11 pagesDifferences in Tractor Performance Parameters Between Single-Wheel 4WD and Dual-Wheel 2WD Driving SystemsLuis Alberto Garrido MendozaNo ratings yet
- Effects of Different Tire Configurations On Tractor Performance (#138475) - 119900Document8 pagesEffects of Different Tire Configurations On Tractor Performance (#138475) - 119900Caio GiarettaNo ratings yet
- Influence of Inflation Pressure in Tires On Traction Ratio 2Wd and 4Wd Driving Modes of TractorDocument8 pagesInfluence of Inflation Pressure in Tires On Traction Ratio 2Wd and 4Wd Driving Modes of TractorRavi VhtakarNo ratings yet
- Power Circulation in Driveline System When The WheDocument9 pagesPower Circulation in Driveline System When The WheAntonio GasparNo ratings yet
- Design of A Drivetrain For Sae Baja RaciDocument9 pagesDesign of A Drivetrain For Sae Baja Raciragavendra marimuthuNo ratings yet
- Computer Simulations To Maximise Fuel Efficiency and Work Performance of Agricultural Tractors in Rotovating and Ploughing OperationsDocument11 pagesComputer Simulations To Maximise Fuel Efficiency and Work Performance of Agricultural Tractors in Rotovating and Ploughing OperationsKhairulNo ratings yet
- Design Manufacturing Analysis of Differential Crown Gear and Pinion For MFWD AxleDocument8 pagesDesign Manufacturing Analysis of Differential Crown Gear and Pinion For MFWD AxleVinay Prasad NNo ratings yet
- Brake SystemDocument14 pagesBrake SystemvandanaharikumarNo ratings yet
- Study On Low-Speed Steering Resistance Torque of VDocument16 pagesStudy On Low-Speed Steering Resistance Torque of VDanilo RojasNo ratings yet
- Front-and-Rear-Wheel-Independent-Drive-Type Electric Vehicle (FRID EV) With Compatible Driving Performance and SafetyDocument10 pagesFront-and-Rear-Wheel-Independent-Drive-Type Electric Vehicle (FRID EV) With Compatible Driving Performance and Safetykkumaran32No ratings yet
- Recent Advances in Antilock Braking Systems and Traction Control SystemsDocument15 pagesRecent Advances in Antilock Braking Systems and Traction Control Systemsdavid_luzNo ratings yet
- The Primary Purpose of Agricultural TractorsDocument1 pageThe Primary Purpose of Agricultural TractorsBorlescu AndreiNo ratings yet
- Archive of SID: Design of A New Anti-Lock Braking System For MotorcyclesDocument9 pagesArchive of SID: Design of A New Anti-Lock Braking System For MotorcyclesIndra Chandra SetiawanNo ratings yet
- Auto WikiDocument313 pagesAuto WikijhpandiNo ratings yet
- Road Performance Curves: Acceleration, Gradability and Drawbar PullDocument83 pagesRoad Performance Curves: Acceleration, Gradability and Drawbar Pullpbd123autoNo ratings yet
- Vehicle DynamicsDocument17 pagesVehicle Dynamicsanwins85No ratings yet
- Design and Calculation of Planetary Transmission WDocument8 pagesDesign and Calculation of Planetary Transmission Wkarnail singh dhimanNo ratings yet
- Analysis of Loss Cost of Road Pavement Distress Due To Overloading Freight TransportationDocument16 pagesAnalysis of Loss Cost of Road Pavement Distress Due To Overloading Freight TransportationHeńřÿ ŁøĵæńNo ratings yet
- Suhane 2018Document10 pagesSuhane 2018Kylo RenNo ratings yet
- Power Losses and Energy Efficiency of Multi-Wheel Drive VehiclesDocument12 pagesPower Losses and Energy Efficiency of Multi-Wheel Drive VehiclesDeepak KayNo ratings yet
- Optimization of Key Parts of Front Suspension System of Three WheelerDocument6 pagesOptimization of Key Parts of Front Suspension System of Three WheelerDarmanNo ratings yet
- 5theory of ABS OperationDocument12 pages5theory of ABS Operationアン ヒNo ratings yet
- Maximum Engine Force Per Gear As Function of Vehicle Speed. This Particular Engine Has A Torque Limit of 400Nm and A Power Limit of 280hpDocument4 pagesMaximum Engine Force Per Gear As Function of Vehicle Speed. This Particular Engine Has A Torque Limit of 400Nm and A Power Limit of 280hpNIKASH maniNo ratings yet
- Pra Elementary Study Ride Semar-T Model: Proposal Tugas AkhirDocument30 pagesPra Elementary Study Ride Semar-T Model: Proposal Tugas AkhirDanang JoyoeNo ratings yet
- Gradeability For Automobiles: Akilesh YamsaniDocument7 pagesGradeability For Automobiles: Akilesh YamsaninrjmanitNo ratings yet
- Traction Tractor PerformanceDocument48 pagesTraction Tractor PerformanceSubhasis Mishra67% (3)
- Am 09 601 Vehicle DynamicsDocument104 pagesAm 09 601 Vehicle DynamicsMuhammed HussainNo ratings yet
- Operational and Design Parameters of Unified VehiclesDocument8 pagesOperational and Design Parameters of Unified VehiclesTJPRC PublicationsNo ratings yet
- Res ResDocument26 pagesRes ResEfjay LagdaNo ratings yet
- Tri Cycle DesignDocument7 pagesTri Cycle Designኩሉ ብኣምላኽ ኮነNo ratings yet
- DESIGN AND DEVELOPMENT OF A TRANSMISSION-with-cover-page-v2Document11 pagesDESIGN AND DEVELOPMENT OF A TRANSMISSION-with-cover-page-v2Maria Camila SantiagoNo ratings yet
- Tyre Report SampleDocument5 pagesTyre Report SampleArka PatraNo ratings yet
- Wheel Loader'S Penetration (Crowd) Force and Impacting FactorsDocument21 pagesWheel Loader'S Penetration (Crowd) Force and Impacting FactorsZahir KhiraNo ratings yet
- Motor Torque Calculations For Electric Vehicle PDFDocument2 pagesMotor Torque Calculations For Electric Vehicle PDFPasupuleti SivakumarNo ratings yet
- PowertrainDocument13 pagesPowertrainso.sorrounding factNo ratings yet
- The Study On The Damage-1Document10 pagesThe Study On The Damage-1Usman Effendi FendiNo ratings yet
- A Proposed Model For Optimizing The Drawbar Pull For Off-Road VehiclesDocument16 pagesA Proposed Model For Optimizing The Drawbar Pull For Off-Road VehiclesJonNo ratings yet
- Automotive ChassisDocument22 pagesAutomotive ChassisSathistrnpcNo ratings yet
- Brake Balance BAR: and Twin Master Cylinder Hydraulic Braking SystemDocument20 pagesBrake Balance BAR: and Twin Master Cylinder Hydraulic Braking SystemHasnain SaleemNo ratings yet
- Fem Tire Design and Analysis OfdurabilityDocument8 pagesFem Tire Design and Analysis OfdurabilityNavid AhadiNo ratings yet
- Differentials CompressedDocument8 pagesDifferentials CompressedMayur PanchalNo ratings yet
- Contributions Regarding The Study of The Braking System of CarsDocument7 pagesContributions Regarding The Study of The Braking System of Carswww.irjes.comNo ratings yet
- Efficient Farm Vehicles Tractor Tyre SelectionDocument4 pagesEfficient Farm Vehicles Tractor Tyre SelectionFrimpong Justice AlexNo ratings yet
- 7 - Field - Performance - of - An - Agricultural - Tractor - FitteDocument5 pages7 - Field - Performance - of - An - Agricultural - Tractor - FittemetaladhayNo ratings yet
- Ijmet 06 10 023Document11 pagesIjmet 06 10 023IAEME PublicationNo ratings yet
- Res ResDocument24 pagesRes ResEfjay LagdaNo ratings yet
- Automobile LayoutDocument11 pagesAutomobile Layoutsa_sherkarNo ratings yet
- Comparative Analysis of Motorcycle Braking Performance in Emergency SituationDocument9 pagesComparative Analysis of Motorcycle Braking Performance in Emergency SituationAk Kun FullNo ratings yet
- Types of Chassis LayoutDocument8 pagesTypes of Chassis LayoutMatthew SmithNo ratings yet
- Experiment No: 5: Automobile Engineering Lab (Me-408N)Document4 pagesExperiment No: 5: Automobile Engineering Lab (Me-408N)Vinay GirdharNo ratings yet
- Rolling Circumference Can Be Defined As The Distance A Tire Travels in One Revolution. Due ToDocument6 pagesRolling Circumference Can Be Defined As The Distance A Tire Travels in One Revolution. Due ToRavi TarunNo ratings yet
- Influence of The Tires Pressure in The Vehicle FuelDocument11 pagesInfluence of The Tires Pressure in The Vehicle FuelAdobe IlNo ratings yet
- Farm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsFrom EverandFarm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsNo ratings yet
- High Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsFrom EverandHigh Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsNo ratings yet
- Guide for Planning, Construction and Maintenance of Forest RoadsFrom EverandGuide for Planning, Construction and Maintenance of Forest RoadsNo ratings yet
- Filtri Landini PDFDocument59 pagesFiltri Landini PDFAndrei Mihai100% (1)
- Assignment 1Document9 pagesAssignment 1Smarajit MishraNo ratings yet
- Android-RD Services Integration Document V1.1.8Document22 pagesAndroid-RD Services Integration Document V1.1.8bksahu1194No ratings yet
- Lesson 2: 2.1. Safety Precautions in Plumbing Works and Plumbing InstrumentsDocument2 pagesLesson 2: 2.1. Safety Precautions in Plumbing Works and Plumbing InstrumentsYandi TVNo ratings yet
- One Angel Square, The Co-Operative Group HeadquartersDocument6 pagesOne Angel Square, The Co-Operative Group HeadquartersAyushree SharmaNo ratings yet
- 1 - Basics of CBs For Khandala SMDocument17 pages1 - Basics of CBs For Khandala SMnageswara_mutyalaNo ratings yet
- Chapter 1 1st HalfDocument5 pagesChapter 1 1st Halfandreicatapang563No ratings yet
- Saleem HDD 6Document2 pagesSaleem HDD 6Prince SaleemNo ratings yet
- Tema: Electromagnetic Compass Sensor MD 52 A: Mentor: Zoran Mikelić, Dipl. Ing. Kandidat: Vedran ŽuraDocument13 pagesTema: Electromagnetic Compass Sensor MD 52 A: Mentor: Zoran Mikelić, Dipl. Ing. Kandidat: Vedran ŽuramostarzadarNo ratings yet
- Operation Management (CBMEC2) : Module 1/lesson 2-3/week 2-3Document3 pagesOperation Management (CBMEC2) : Module 1/lesson 2-3/week 2-3Abijel PanizaNo ratings yet
- Ahnay Series: Bi-66-580 To Bi-66-600Document2 pagesAhnay Series: Bi-66-580 To Bi-66-600Eureka SolarNo ratings yet
- Unit 1 To 5 Qbank AnsDocument7 pagesUnit 1 To 5 Qbank AnsranganNo ratings yet
- 15 - HPL2010-EN. Transformadores PDFDocument20 pages15 - HPL2010-EN. Transformadores PDFphredlovNo ratings yet
- MES EbookDocument42 pagesMES EbookmsohaibkhalidNo ratings yet
- Aerospace Acronym and Abbreviation Guide - Avionics Magazine PDFDocument28 pagesAerospace Acronym and Abbreviation Guide - Avionics Magazine PDFAntonio Hernán Lora LuzNo ratings yet
- Database Management System LAB Final Q1Document20 pagesDatabase Management System LAB Final Q1Michelle EsperalNo ratings yet
- Charter - Testing Final-1-1Document29 pagesCharter - Testing Final-1-1Me BujjuNo ratings yet
- Stabila LAR-350 - ManualDocument32 pagesStabila LAR-350 - ManualJiCiNo ratings yet
- OS PPT 3-2Document28 pagesOS PPT 3-2drkhamuruddeenNo ratings yet
- Diesel EnginesDocument10 pagesDiesel EnginesQuang Pham100% (2)
- Key-Value Database - WikipediaDocument4 pagesKey-Value Database - WikipediaSofia SerraNo ratings yet
- PMMT Additional Notes: Project Management Unit 28 October 2011Document83 pagesPMMT Additional Notes: Project Management Unit 28 October 2011ayeshaarif3No ratings yet
- Epson TM-U220Document104 pagesEpson TM-U220Keith Kevin TabanaoNo ratings yet
- Pearl Smart City: Project FeaturesDocument7 pagesPearl Smart City: Project FeaturesVivek Dutt MajetiNo ratings yet
- Online Admission System User ManualDocument27 pagesOnline Admission System User ManualDizzyNo ratings yet
- El160.80.50 020 0343 00a PDFDocument17 pagesEl160.80.50 020 0343 00a PDFfreddyjoertyNo ratings yet
- FCT 1.2 - Fault Finding OverviewDocument11 pagesFCT 1.2 - Fault Finding Overviewdener.santosNo ratings yet