Download as pdf or txt
You might also like
- ISA IEC 62443 Cybersecurity Certification - A GuideDocument19 pagesISA IEC 62443 Cybersecurity Certification - A GuideAmr M. Amin50% (2)
- Sans 1200 HDocument3 pagesSans 1200 HfilipeNo ratings yet
- S4H - 074 How To Approach Fit To Standard Analysis - CloudDocument44 pagesS4H - 074 How To Approach Fit To Standard Analysis - CloudRaymundo PiresNo ratings yet
- Kosmos-2Document20 pagesKosmos-2london testNo ratings yet
- Resolving Shell NounsDocument12 pagesResolving Shell NounsJarosław WilińskiNo ratings yet
- S H: R, I A H I T W: Uccessor Eads Ecurring Nterpretable Ttention Eads N HE ILDDocument26 pagesS H: R, I A H I T W: Uccessor Eads Ecurring Nterpretable Ttention Eads N HE ILDpeterNo ratings yet
- Multi-Grained Spatio-Temporal Modeling For Lip-Reading: Wangchenhao17@mails - Ucas.ac - CNDocument11 pagesMulti-Grained Spatio-Temporal Modeling For Lip-Reading: Wangchenhao17@mails - Ucas.ac - CNtasinsafwathcNo ratings yet
- Multimodal Chain of Thought Reasoning in Language ModelsDocument19 pagesMultimodal Chain of Thought Reasoning in Language ModelsBlerim HasaNo ratings yet
- Librispeech - An ASR Corpus Based On Public Domain Audio Books by Panayotov Et Al (April, 2015)Document5 pagesLibrispeech - An ASR Corpus Based On Public Domain Audio Books by Panayotov Et Al (April, 2015)Mtakuja LeoNo ratings yet
- Fractal Patterns May Unravel The Intelligence in Next-Token PredictionDocument15 pagesFractal Patterns May Unravel The Intelligence in Next-Token PredictionMichael KowalNo ratings yet
- From Topic To Object Grammaticalization of Differential Object Marking in RomanianDocument43 pagesFrom Topic To Object Grammaticalization of Differential Object Marking in RomanianGabriela BejenaruNo ratings yet
- Week10 - Text-Word VectorsDocument16 pagesWeek10 - Text-Word VectorsLuis PinuerNo ratings yet
- Cambridge IGCSE: First Language English (Us) For Examination From 2020Document10 pagesCambridge IGCSE: First Language English (Us) For Examination From 2020anduNo ratings yet
- Optimization and Quantization in Gradient Symbol Systems: A Framework For Integrating The Continuous and The Discrete in CognitionDocument36 pagesOptimization and Quantization in Gradient Symbol Systems: A Framework For Integrating The Continuous and The Discrete in CognitionddascaluNo ratings yet
- Semantic Rule Based Text Generation: 2. The XCALIBUR Natural Language InterfaceDocument5 pagesSemantic Rule Based Text Generation: 2. The XCALIBUR Natural Language InterfaceYouniverseNo ratings yet
- GRADE 6 FA 2 PortionDocument4 pagesGRADE 6 FA 2 Portionveera veenaNo ratings yet
- Design American English StudentDocument6 pagesDesign American English Studentf98ykjhtm8No ratings yet
- 120 Acta36Document11 pages120 Acta36Classics ClassicsNo ratings yet
- Goldberg Cxs LMMs 2023Document33 pagesGoldberg Cxs LMMs 2023AlbisNo ratings yet
- Skeleton of Thought Paper5Document33 pagesSkeleton of Thought Paper5abhimanyuyadavnsitNo ratings yet
- MEMO SP Worksheet 2 (GR 8) MEMO DogsDocument3 pagesMEMO SP Worksheet 2 (GR 8) MEMO Dogsjustin.friend05No ratings yet
- Class Ix Summer Vacation Assignment 2024-25Document3 pagesClass Ix Summer Vacation Assignment 2024-25indumatinawanderNo ratings yet
- BGE M3-Embedding: Multi-Lingual, Multi-Functionality, Multi-Granularity Text Embeddings Through Self-Knowledge DistillationDocument16 pagesBGE M3-Embedding: Multi-Lingual, Multi-Functionality, Multi-Granularity Text Embeddings Through Self-Knowledge Distillationstataholics8No ratings yet
- 1 s2.0 S1364661305001439 Main PDFDocument7 pages1 s2.0 S1364661305001439 Main PDFAkire MtzNo ratings yet
- Ozdemir Et Al. - 2022 - Language Model-Based Paired Variational AutoencodeDocument13 pagesOzdemir Et Al. - 2022 - Language Model-Based Paired Variational AutoencodeDurgesh Haribhau SalunkheNo ratings yet
- FlexCap: Generating Rich, Localized, and Flexible Captions in ImagesDocument27 pagesFlexCap: Generating Rich, Localized, and Flexible Captions in Imagesxepit98367No ratings yet
- An Algorithm For The Unsupervised Learni PDFDocument20 pagesAn Algorithm For The Unsupervised Learni PDFappled.apNo ratings yet
- FrozenDocument19 pagesFrozenRavi KNo ratings yet
- Using Slot Grammar - Rc23978revisedDocument69 pagesUsing Slot Grammar - Rc23978revisedcravenaNo ratings yet
- Deep Audio-Visual Speech RecognitionDocument13 pagesDeep Audio-Visual Speech RecognitionholissonNo ratings yet
- A Deep Learning Approach To Rhythm Modelling With ApplicationsDocument4 pagesA Deep Learning Approach To Rhythm Modelling With ApplicationsVlad ApetreiNo ratings yet
- Лабораторна робота 1 Лупій АнастасіяDocument14 pagesЛабораторна робота 1 Лупій АнастасіяАнастасія ЛупійNo ratings yet
- m2 Recherche Phraseology Gledhill PDFDocument23 pagesm2 Recherche Phraseology Gledhill PDFM BidakiNo ratings yet
- The All-Seeing Project: Towards Panoptic Visual Recognition and Understanding of The Open WorldDocument28 pagesThe All-Seeing Project: Towards Panoptic Visual Recognition and Understanding of The Open WorldbibekNo ratings yet
- Almazan2014 EmbeddedDocument15 pagesAlmazan2014 EmbeddedSunil ChaluvaiahNo ratings yet
- Syllabus 12TH 2022Document113 pagesSyllabus 12TH 2022mahendra senNo ratings yet
- Ela Priority StandardsDocument15 pagesEla Priority Standardsapi-527646442No ratings yet
- The Small-World of Human LanguageDocument6 pagesThe Small-World of Human LanguageJhonNo ratings yet
- Sanchez Natural Language ProcessingDocument4 pagesSanchez Natural Language ProcessingMarneil Allen SanchezNo ratings yet
- Andrea Martinez Thematic Unit TemplateDocument3 pagesAndrea Martinez Thematic Unit Templateapi-630894949No ratings yet
- English Test Unit 2 2nd A-B 2024 (Reeditada Por MR Ricardo)Document5 pagesEnglish Test Unit 2 2nd A-B 2024 (Reeditada Por MR Ricardo)ricardoNo ratings yet
- A Data Oriented Parsing Model ForDocument8 pagesA Data Oriented Parsing Model ForLucas BorgesNo ratings yet
- DLL - English 5 - Q1 - W2Document9 pagesDLL - English 5 - Q1 - W2Bem CamonNo ratings yet
- MarkDocument3 pagesMarkEllaNo ratings yet
- Modelling Specialised Knowledge With Conceptual Frames: The Termframe Approach To A Structured Visual Domain RepresentationDocument2 pagesModelling Specialised Knowledge With Conceptual Frames: The Termframe Approach To A Structured Visual Domain RepresentationZivagoNo ratings yet
- Modula-2 and Oberon: Niklaus WirthDocument10 pagesModula-2 and Oberon: Niklaus WirthlmauroNo ratings yet
- Unit2. Book - (Garceta - SegundaEd)Document3 pagesUnit2. Book - (Garceta - SegundaEd)NOSE MYNAMENo ratings yet
- Orca 2: Teaching Small Language Models How To ReasonDocument53 pagesOrca 2: Teaching Small Language Models How To ReasonRaviteja ValluriNo ratings yet
- 1911.11423v1 Merity TransformersDocument9 pages1911.11423v1 Merity Transformersai rednaNo ratings yet
- Ancient Civilizations) : 2) Ill Gotten Gains Never Prosper (Ethics in Business)Document5 pagesAncient Civilizations) : 2) Ill Gotten Gains Never Prosper (Ethics in Business)Der ZouNo ratings yet
- Learning Language-Sections 1.1-1.9 and 2.1Document30 pagesLearning Language-Sections 1.1-1.9 and 2.1stefgerosaNo ratings yet
- Xiao Et Al. - 2023 - Efficient Streaming Language Models With AttentionDocument12 pagesXiao Et Al. - 2023 - Efficient Streaming Language Models With AttentionpyryezorNo ratings yet
- (2023) VoxPoserDocument23 pages(2023) VoxPoserpolygalaceae0730No ratings yet
- Guo 等 - 2024 - SkySense a Multi-Modal Remote Sensing FoundationDocument29 pagesGuo 等 - 2024 - SkySense a Multi-Modal Remote Sensing Foundationpjnbe6No ratings yet
- Deep Contextualized Word RepresentationDocument15 pagesDeep Contextualized Word RepresentationWeirliam JohnNo ratings yet
- PurCom - Module 2Document1 pagePurCom - Module 2Kia changgiNo ratings yet
- 2021 Mirror-Bert EmnlpDocument18 pages2021 Mirror-Bert Emnlprajesh716No ratings yet
- Huang Seeing Out of The Box End-to-End Pre-Training For Vision-Language Representation CVPR 2021 PaperDocument10 pagesHuang Seeing Out of The Box End-to-End Pre-Training For Vision-Language Representation CVPR 2021 Paperrajagopal.motivate4No ratings yet
- Task 1Document5 pagesTask 1api-490624840No ratings yet
- Convolutional Networks For Images, Speech, and Time-Series: January 1995Document15 pagesConvolutional Networks For Images, Speech, and Time-Series: January 1995sridharchandrasekarNo ratings yet
- Principled Instructions Are All You Need For Questioning LLaMA-1/2, GPT-3.5/4Document24 pagesPrincipled Instructions Are All You Need For Questioning LLaMA-1/2, GPT-3.5/4Jeremias GordonNo ratings yet
- Integrated Lessons Block Plan: LessonDocument2 pagesIntegrated Lessons Block Plan: Lessonapi-380697729No ratings yet
- Eastward Flows the Great River: Festschrift in Honor of Professor William S-Y. WANG on his 80th BirthdayFrom EverandEastward Flows the Great River: Festschrift in Honor of Professor William S-Y. WANG on his 80th BirthdayNo ratings yet
- Information Security Risk Management Policy: General DescriptionDocument8 pagesInformation Security Risk Management Policy: General DescriptionAmr M. Amin100% (1)
- 2021 Ncs GuideDocument84 pages2021 Ncs GuideAmr M. AminNo ratings yet
- Progress CircleDocument3 pagesProgress CircleAmr M. AminNo ratings yet
- Snakes in Suits ExcerptsDocument6 pagesSnakes in Suits ExcerptsAmr M. AminNo ratings yet
- Risk Culture Maturity MonitorDocument2 pagesRisk Culture Maturity MonitorAmr M. AminNo ratings yet
- 2112 09342Document12 pages2112 09342Amr M. AminNo ratings yet
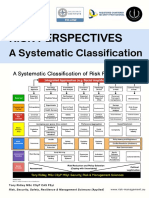
- Risk Perspectives - A Systematic ClassificationDocument8 pagesRisk Perspectives - A Systematic ClassificationAmr M. AminNo ratings yet
- 14 Algorithms Every Programmer Needs To KnowDocument16 pages14 Algorithms Every Programmer Needs To KnowAmr M. AminNo ratings yet
- Militaire Spectator 7-8-2018 de LandmeterDocument14 pagesMilitaire Spectator 7-8-2018 de LandmeterAmr M. AminNo ratings yet
- MS WmiDocument232 pagesMS WmiAmr M. AminNo ratings yet
- Dbi B410Document31 pagesDbi B410Amr M. AminNo ratings yet
- Secure Coding PracticesDocument25 pagesSecure Coding PracticesAmr M. Amin100% (1)
- Non-Functional Requirements SpecificationsDocument7 pagesNon-Functional Requirements SpecificationsAmr M. AminNo ratings yet
- 5-Removable Partial Denture DesignDocument66 pages5-Removable Partial Denture DesignHiYam MohamutNo ratings yet
- 10 DM Commandments EbookDocument9 pages10 DM Commandments EbookLily KimNo ratings yet
- + Eldlife I: 170,000.00 Total Amount Total Amount Before Tax 170,000.00 170,000.00Document1 page+ Eldlife I: 170,000.00 Total Amount Total Amount Before Tax 170,000.00 170,000.00Kaifi asgarNo ratings yet
- Vip 45.3Document17 pagesVip 45.3BūvfizikaNo ratings yet
- Contoh Financial PlanDocument4 pagesContoh Financial PlanJonathan ChandhikaNo ratings yet
- DentinDocument133 pagesDentinMohammed hisham khan100% (3)
- HES 005 Session 5 SASDocument10 pagesHES 005 Session 5 SASG INo ratings yet
- Builder - PDF (China Substitution)Document11 pagesBuilder - PDF (China Substitution)Finsen SooNo ratings yet
- Vendor ListDocument3 pagesVendor ListJohn Son GNo ratings yet
- Rais12 SM CH19Document29 pagesRais12 SM CH19Anton VitaliNo ratings yet
- Biochem Lab NotesDocument26 pagesBiochem Lab NotesRicky Justin NgoNo ratings yet
- Laura Su ResumeDocument1 pageLaura Su Resumeapi-280311314No ratings yet
- Amusement Events and Recreation Award Ma000080 Pay GuideDocument17 pagesAmusement Events and Recreation Award Ma000080 Pay GuideCol. O'NeillNo ratings yet
- De Giua Ky 2 Tieng Anh 12 Nam 2022 2023 Truong THPT Nguyen Tat Thanh TP HCMDocument6 pagesDe Giua Ky 2 Tieng Anh 12 Nam 2022 2023 Truong THPT Nguyen Tat Thanh TP HCMNguyễn ĐạtNo ratings yet
- Ap4na1r4cmt ADocument6 pagesAp4na1r4cmt AMar GaoNo ratings yet
- Standard Kessel Cat - Gral.Document40 pagesStandard Kessel Cat - Gral.Marcelo ResckNo ratings yet
- Apurba MazumdarDocument2 pagesApurba MazumdarDRIVECURENo ratings yet
- DLL Quarter 3 Week 10 SCIENCE 3Document3 pagesDLL Quarter 3 Week 10 SCIENCE 3Cherry ursuaNo ratings yet
- 1 - Solved - The Food Services Division of Cedar River Amusement Par.Document2 pages1 - Solved - The Food Services Division of Cedar River Amusement Par.RATRINo ratings yet
- The Mavericks MNIT 1st Year 2022-23Document3 pagesThe Mavericks MNIT 1st Year 2022-23Shantul KhandelwalNo ratings yet
- Legendary RakshashaDocument24 pagesLegendary RakshashajavandarNo ratings yet
- Aef2wb 34 35Document2 pagesAef2wb 34 35sigafile11No ratings yet
- Disk No. Label Comments BootDocument1 pageDisk No. Label Comments BootDavid HiddingsNo ratings yet
- All Pass Comb FiltersDocument13 pagesAll Pass Comb Filterspho144No ratings yet
- Bestiary of The Rosewood Highlands Draft 1-4-08!07!19Document82 pagesBestiary of The Rosewood Highlands Draft 1-4-08!07!19Stefano Chiaramonti100% (2)
- SDM 1Document13 pagesSDM 1prodecoy 9No ratings yet
- Srikanth ImJDocument2 pagesSrikanth ImJTEJA unixNo ratings yet
- Sarrat National High School: Ragsak Ken Rag-Omi Ti Mangmuli Dagiti UmiliDocument4 pagesSarrat National High School: Ragsak Ken Rag-Omi Ti Mangmuli Dagiti UmiliKharylle AgnirNo ratings yet