Download as pdf or txt
You might also like
- VGA Controller PDFDocument6 pagesVGA Controller PDFAviPatelNo ratings yet
- FPGA Based Pong GameDocument4 pagesFPGA Based Pong GameJosh CabreraNo ratings yet
- Neogeo Programmer GuideDocument220 pagesNeogeo Programmer GuidesudoNo ratings yet
- Automatic Water Level Indicator and Pump Controller Using ArduinoDocument18 pagesAutomatic Water Level Indicator and Pump Controller Using ArduinoShishir ZamanNo ratings yet
- Vga Controller Using VerilogDocument15 pagesVga Controller Using VerilogKetan JadavNo ratings yet
- PSoC VGA Display DriverDocument17 pagesPSoC VGA Display DriverkiranravooriNo ratings yet
- Vga VHDLDocument18 pagesVga VHDLDaveNo ratings yet
- Block DiagramDocument6 pagesBlock DiagramMuhammad AhmedNo ratings yet
- 1 Computer Hardware and Networking Module 1Document20 pages1 Computer Hardware and Networking Module 1Anandhu cNo ratings yet
- Design and FPGA Implementation of Addressable Chip For Multiple Sensor ApplicationsDocument3 pagesDesign and FPGA Implementation of Addressable Chip For Multiple Sensor Applicationsmgr_ganeshNo ratings yet
- VGA ReportDocument9 pagesVGA ReportSoorej KamalNo ratings yet
- Using The Psoc To Drive The NKK SmartswitchDocument2 pagesUsing The Psoc To Drive The NKK SmartswitchPVPPPNo ratings yet
- VGA Signal Generation With The XS BoardDocument12 pagesVGA Signal Generation With The XS BoardMassimoBegliominiNo ratings yet
- VGA Configuration Algorithm Using VHDLDocument8 pagesVGA Configuration Algorithm Using VHDLSebastian MendozaNo ratings yet
- F Pga ReportDocument31 pagesF Pga ReportsoniyaNo ratings yet
- Mouse Painter PRO: Team MembersDocument11 pagesMouse Painter PRO: Team MembersRudra Pratap SumanNo ratings yet
- 8085 Project ReportDocument20 pages8085 Project ReportSandeep Yadav100% (1)
- Space Invaders: Lund University Faculty of EngineeringDocument13 pagesSpace Invaders: Lund University Faculty of EngineeringNiharika GuptaNo ratings yet
- Ece574 2015 Light Sensor VGA ProjectDocument4 pagesEce574 2015 Light Sensor VGA Projectmanik9000No ratings yet
- Gowtham Kanna M 18ec1026Document23 pagesGowtham Kanna M 18ec1026gayathriNo ratings yet
- Digital Dice Using At89C51: A Report Submitt Ed To MSRIT Bangalore, For Partial Requirement of Award of Degree ofDocument21 pagesDigital Dice Using At89C51: A Report Submitt Ed To MSRIT Bangalore, For Partial Requirement of Award of Degree ofHimica KhuranaNo ratings yet
- Act3 - Timers and DelaysDocument25 pagesAct3 - Timers and DelaysLaritza Marquez CristanchoNo ratings yet
- Project 3Document16 pagesProject 3gsjhgNo ratings yet
- Calculator 1Document39 pagesCalculator 1RatnakarVarunNo ratings yet
- Encoder Board MACH3Document12 pagesEncoder Board MACH3Minerva MartinezNo ratings yet
- Fpguitar Hero: Sarah Spector and Alejandro Diaz 6.111 Fall 2019Document20 pagesFpguitar Hero: Sarah Spector and Alejandro Diaz 6.111 Fall 2019Marcelo DelgadoNo ratings yet
- LocatorDocument2 pagesLocatorAndy MalembouNo ratings yet
- Project Report: Tetris: Prof. Stephen EdwardsDocument39 pagesProject Report: Tetris: Prof. Stephen EdwardsSanath Kumar SanathkumarNo ratings yet
- Yoshi's NightmareDocument15 pagesYoshi's Nightmaresanes durangoNo ratings yet
- Fpga Interface For An Analog Input Module: Volume 2, Issue 4, April 2013Document6 pagesFpga Interface For An Analog Input Module: Volume 2, Issue 4, April 2013International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Psoc 3 Magnetic Card Reader: Application Note AbstractDocument11 pagesPsoc 3 Magnetic Card Reader: Application Note AbstractYonatan José Roche AndradeNo ratings yet
- Final ReportDocument5 pagesFinal ReportGlenn ThomasNo ratings yet
- Final ReportDocument5 pagesFinal Report01 pallavi waghmareNo ratings yet
- Rzeszut Osciloscope MAM 1 2018Document3 pagesRzeszut Osciloscope MAM 1 2018CarlosReisNo ratings yet
- Arduino DroneDocument16 pagesArduino DroneBằng Trần DuyNo ratings yet
- Manual RFID FastTagReaderDocument40 pagesManual RFID FastTagReaderMARIGANTI SRINIVASULUNo ratings yet
- EE3271 Design Laboratory: Lab Supervisor - Dr. WH LauDocument29 pagesEE3271 Design Laboratory: Lab Supervisor - Dr. WH Laujanderson13No ratings yet
- RGB LED Panel Driver TutorialDocument14 pagesRGB LED Panel Driver TutorialDavid VietNo ratings yet
- Joystick Port Interface ProjectsDocument25 pagesJoystick Port Interface Projectsandrei_scNo ratings yet
- 8 Channel Quiz Buzzer Circuit Using MicrocontrollerDocument5 pages8 Channel Quiz Buzzer Circuit Using MicrocontrollerBhupendra(Rahul...) kumarNo ratings yet
- Homework 5: Theory of Operation and Hardware Design NarrativeDocument10 pagesHomework 5: Theory of Operation and Hardware Design NarrativeAmit SangwanNo ratings yet
- Python Project ReportDocument25 pagesPython Project ReportShanaya Gaharana33% (3)
- IOT Practical File KOT 551Document46 pagesIOT Practical File KOT 551qz5jq94yh2No ratings yet
- IOT CA2 ReportDocument10 pagesIOT CA2 ReportmailadwaitharunNo ratings yet
- EEE40014 JoyStick Control Report (Challenge)Document7 pagesEEE40014 JoyStick Control Report (Challenge)Muhammad Ali TehseenNo ratings yet
- FPGA-Based Multi Protocol Data Acquisition System With High Speed USB InterfaceDocument4 pagesFPGA-Based Multi Protocol Data Acquisition System With High Speed USB InterfaceVibin MammenNo ratings yet
- Interfacing Nokia ScreenDocument4 pagesInterfacing Nokia ScreenDavid Sanderson100% (2)
- A Design of Digital Stopwatch Circuit With Chip ImplementationDocument7 pagesA Design of Digital Stopwatch Circuit With Chip ImplementationANNA INDIANo ratings yet
- PC Based Oscilloscope Using ArduinoDocument18 pagesPC Based Oscilloscope Using ArduinoATMAKURI S V N ANJANEYA SESHASAINo ratings yet
- 001-58304 AN58304 - PSoC R 3 and PSoC 5LP - Pin Selection For Analog DesignsDocument12 pages001-58304 AN58304 - PSoC R 3 and PSoC 5LP - Pin Selection For Analog DesignsNorbey Marin MorenoNo ratings yet
- National Institute of Technology Calicut: Department of Electronics and Communication EngineeringDocument17 pagesNational Institute of Technology Calicut: Department of Electronics and Communication EngineeringKrishnajithKjNo ratings yet
- ESP32Document49 pagesESP32GukeshNo ratings yet
- Color Detection Using FPGA Based Smart CameraDocument19 pagesColor Detection Using FPGA Based Smart Cameratry199No ratings yet
- 2010 CASPER Workshop: Tutorial 4: Wideband PocoDocument16 pages2010 CASPER Workshop: Tutorial 4: Wideband PocotrabajadosNo ratings yet
- Mega Drive Architecture: Architecture of Consoles: A Practical Analysis, #3From EverandMega Drive Architecture: Architecture of Consoles: A Practical Analysis, #3No ratings yet
- 1.8inch LCD Module User Manual enDocument7 pages1.8inch LCD Module User Manual enAyush YadavNo ratings yet
- SensorsDocument6 pagesSensorsgithexs.commNo ratings yet
- Digital Calulator Using 89C52 Micro ControllerDocument8 pagesDigital Calulator Using 89C52 Micro Controllerchachunasayan75% (4)
- SNES Architecture: Architecture of Consoles: A Practical Analysis, #4From EverandSNES Architecture: Architecture of Consoles: A Practical Analysis, #4No ratings yet
- Master System Architecture: Architecture of Consoles: A Practical Analysis, #15From EverandMaster System Architecture: Architecture of Consoles: A Practical Analysis, #15Rating: 2 out of 5 stars2/5 (1)
- Zero-Knowledge Identity For Web2 & Web3: Otto MoraDocument20 pagesZero-Knowledge Identity For Web2 & Web3: Otto MoraSSIMeetupNo ratings yet
- What Are The Different Types of Penetration Testing PurplesecDocument26 pagesWhat Are The Different Types of Penetration Testing PurplesecHafa kaliNo ratings yet
- Global CatalogDocument55 pagesGlobal CatalogTilak KapisettyNo ratings yet
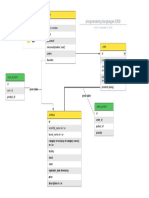
- Programming Languages ERDDocument1 pageProgramming Languages ERDkosaialbonniNo ratings yet
- Instruction Set Architecture and PrinciplesDocument42 pagesInstruction Set Architecture and PrinciplesAmnaNo ratings yet
- Product Description (2019) : Netcol5000-C (030, 032, 065) In-Row Chilled Water Smart Cooling ProductDocument30 pagesProduct Description (2019) : Netcol5000-C (030, 032, 065) In-Row Chilled Water Smart Cooling ProductmuhamedshuaibbhaiNo ratings yet
- Gemini and IRA Financial Class ActionDocument42 pagesGemini and IRA Financial Class ActionGMG EditorialNo ratings yet
- Iridium Talk KomplettDocument55 pagesIridium Talk KomplettBrian BeegeeNo ratings yet
- SIA-MDA and The FutureDocument2 pagesSIA-MDA and The FutureMark MarkNo ratings yet
- Information Retreival AssignmentDocument4 pagesInformation Retreival AssignmentAjith KanduriNo ratings yet
- Delta PLC DVPDocument3 pagesDelta PLC DVPNeftali Asaf Cazares HernandezNo ratings yet
- Asarn 84Document46 pagesAsarn 84Luis ZamoraNo ratings yet
- M. Gopal - Control Systems - Principles and Design (2008, Tata McGraw Hill Publishing Co. LTD.) - Libgen - LiDocument810 pagesM. Gopal - Control Systems - Principles and Design (2008, Tata McGraw Hill Publishing Co. LTD.) - Libgen - LiDhanush Dhundasi67% (3)
- Scripting LanguagesDocument23 pagesScripting Languageshariya100% (1)
- ADF EBS IntegrationDocument2 pagesADF EBS IntegrationHusnain A AliNo ratings yet
- PRISM ConferenceDocument131 pagesPRISM ConferenceDavid WrightNo ratings yet
- PHD Thesis Latex Template TumDocument4 pagesPHD Thesis Latex Template Tumrachelphillipsbillings100% (1)
- Data-Collector-eSolar WiFi-DDocument1 pageData-Collector-eSolar WiFi-DFuad KrichouNo ratings yet
- PSOne C-Sync Mod by Four XDocument16 pagesPSOne C-Sync Mod by Four XEduardo PachecoNo ratings yet
- Syllabus PDFDocument2 pagesSyllabus PDFDurgavajjala KarthikNo ratings yet
- GSM SIM & SecurityDocument31 pagesGSM SIM & SecuritymanthasaikarthikNo ratings yet
- Apj Abdul Kalam Technological University Thiruvananthapuram, Kerala, INDIADocument35 pagesApj Abdul Kalam Technological University Thiruvananthapuram, Kerala, INDIAJai JohnNo ratings yet
- 27.2.15 Lab - Investigating A Malware Exploit - ILMDocument17 pages27.2.15 Lab - Investigating A Malware Exploit - ILMKamel ZianiNo ratings yet
- Hypermedia, Multimedia and HypertextDocument3 pagesHypermedia, Multimedia and HypertextINGRID JACQUELI ARIAS NUÑEZNo ratings yet
- Ipc847d Operating Instructions en-USDocument250 pagesIpc847d Operating Instructions en-UShassNo ratings yet
- Teams One-Pager Comms TemplatesDocument68 pagesTeams One-Pager Comms TemplatesAbhijit GhoshNo ratings yet
- Datasheet NSODocument7 pagesDatasheet NSONightNo ratings yet
- Hardware FiberhomeDocument106 pagesHardware FiberhomeMehdi100% (2)
- Getting Started With Licensing - Tally Helpdesk - Tally - ERP 9 - Tally DeveloperDocument66 pagesGetting Started With Licensing - Tally Helpdesk - Tally - ERP 9 - Tally DeveloperalbimorkalNo ratings yet
- Anonymous Presents: Operation Epik FailDocument3 pagesAnonymous Presents: Operation Epik FailSorrryNo ratings yet