
Nonlinear Flight Control of A Two-Degree-of-Freedom Helicopter Using Takagi-Sugeno Fuzzy Model
Nonlinear Flight Control of A Two-Degree-of-Freedom Helicopter Using Takagi-Sugeno Fuzzy Model
You might also like
- 2-DOF Helicopter Controlling by Pole-PlacementsDocument5 pages2-DOF Helicopter Controlling by Pole-PlacementsosdacavNo ratings yet
- Modelling, Identification and Control of A 2 DOF Helicopter PrototypeDocument6 pagesModelling, Identification and Control of A 2 DOF Helicopter PrototypeosdacavNo ratings yet
- Model Predictive Control of A Two-Link Robot Arm: El-Hadi GUECHI Samir Bouzoualegh Lotfi Messikh Sašo BlažicDocument6 pagesModel Predictive Control of A Two-Link Robot Arm: El-Hadi GUECHI Samir Bouzoualegh Lotfi Messikh Sašo BlažicAzeddine DemNo ratings yet
- Symbolic Pole Assignment of 2dof Conventional Helicopter: Tarõk Veli Mumcu Kutluhan Kürúat ÇandõrDocument5 pagesSymbolic Pole Assignment of 2dof Conventional Helicopter: Tarõk Veli Mumcu Kutluhan Kürúat ÇandõrosdacavNo ratings yet
- Model and Observer-Based Controller Design For A Quanser Helicopter With Two DOFDocument5 pagesModel and Observer-Based Controller Design For A Quanser Helicopter With Two DOFosdacavNo ratings yet
- Actuators: Getting Started With Peas-Based Flapping-Wing Mechanisms For Micro Aerial SystemsDocument17 pagesActuators: Getting Started With Peas-Based Flapping-Wing Mechanisms For Micro Aerial SystemsArman AsgharpoorNo ratings yet
- Observer Based Output Feedback Tracking Control of Robot ManipulatorsDocument6 pagesObserver Based Output Feedback Tracking Control of Robot ManipulatorsberkeogulcanparlakNo ratings yet
- Dynamic Modelling and Experimental Identification of Four Rotors Helicopter ParametersDocument7 pagesDynamic Modelling and Experimental Identification of Four Rotors Helicopter Parametersali.azim1380No ratings yet
- PID Controller Design For A Magnetic Levitation System Using An IntelligentDocument8 pagesPID Controller Design For A Magnetic Levitation System Using An Intelligentambachew bizunehNo ratings yet
- Modeling and Altitude Control of Quad-Rotor UAVDocument6 pagesModeling and Altitude Control of Quad-Rotor UAVescanusNo ratings yet
- Fairus_2013_IOP_Conf._Ser.%3A_Mater._Sci._Eng._53_012009-2Document11 pagesFairus_2013_IOP_Conf._Ser.%3A_Mater._Sci._Eng._53_012009-2Miguel AmadorNo ratings yet
- 10 1109ceit 2016 7929049Document5 pages10 1109ceit 2016 7929049KarimNo ratings yet
- Optimal FOPI-FOPD Controller Design For Rotary Inverted Pendulum System Using Grey Wolves' Optimization TechniqueDocument10 pagesOptimal FOPI-FOPD Controller Design For Rotary Inverted Pendulum System Using Grey Wolves' Optimization TechniqueTELKOMNIKANo ratings yet
- PID Vs LQ Control Techniques Applied To An Indoor Micro QuadrotorDocument6 pagesPID Vs LQ Control Techniques Applied To An Indoor Micro QuadrotorAlexandreSidantNo ratings yet
- Twin Rotor Mimo System: Experiment No: 5Document8 pagesTwin Rotor Mimo System: Experiment No: 5sameer sultanNo ratings yet
- Nonlinear Predictive Control of a Tower CraneDocument5 pagesNonlinear Predictive Control of a Tower Cranehồng sơnNo ratings yet
- Regulatory Control of Quadcopter by Designing Third Order SMC ControllerDocument8 pagesRegulatory Control of Quadcopter by Designing Third Order SMC ControllerMebaye BeleteNo ratings yet
- Ica20110200012 71434152Document7 pagesIca20110200012 71434152Lê Tuấn MinhNo ratings yet
- stavrakakis1988Document4 pagesstavrakakis1988caxov16116No ratings yet
- Eea 62 3 2014 103 EN LP 000 PDFDocument7 pagesEea 62 3 2014 103 EN LP 000 PDFhamza gaNo ratings yet
- Synergetic and Sliding Mode Controls of A PMSM: A Comparative StudyDocument5 pagesSynergetic and Sliding Mode Controls of A PMSM: A Comparative StudymellahNo ratings yet
- 390-Article Text-738-1-10-20200709Document6 pages390-Article Text-738-1-10-20200709EsmfNo ratings yet
- Full Control of A QuadrotorDocument6 pagesFull Control of A QuadrotorLuis Orlando Silva VásquezNo ratings yet
- Reconfigurability Analysis of Multirotor UAVsDocument21 pagesReconfigurability Analysis of Multirotor UAVsMarco LoveraNo ratings yet
- Controller Design For A Twin Rotor Helicopter Model Via Exact State Feedback LinearizationDocument6 pagesController Design For A Twin Rotor Helicopter Model Via Exact State Feedback LinearizationSaurabh SharmaNo ratings yet
- Design of Formation Controller Based On BP Neural Network PID ControlDocument9 pagesDesign of Formation Controller Based On BP Neural Network PID Controlsajad soleymanzadeNo ratings yet
- Guassian Process of MPCDocument16 pagesGuassian Process of MPCSai NavaneetNo ratings yet
- DIGITAL INTEGRATIVE LQR CONTROL OF A 2DOF HELICOPTERDocument6 pagesDIGITAL INTEGRATIVE LQR CONTROL OF A 2DOF HELICOPTERPatrick NasserNo ratings yet
- Hectorguillermo 2018Document6 pagesHectorguillermo 2018vishal BhoknalNo ratings yet
- Lars 2008 26Document6 pagesLars 2008 262532909567No ratings yet
- Electronics 08 00221Document13 pagesElectronics 08 00221AMAN GOYALNo ratings yet
- Furuta 1992Document6 pagesFuruta 1992LÊ ĐẠI HIỆPNo ratings yet
- Optimization of Model Reference Adaptive Controller For The Inverted Pendulum System Using CCPSO and DE AlgorithmsDocument12 pagesOptimization of Model Reference Adaptive Controller For The Inverted Pendulum System Using CCPSO and DE AlgorithmsjanitoNo ratings yet
- A Simulink Environment For Simulation and Control of Flexible Manipulator SystemsDocument6 pagesA Simulink Environment For Simulation and Control of Flexible Manipulator SystemsselvamNo ratings yet
- Problems 7Document6 pagesProblems 7soumyadeeptaNo ratings yet
- Adaptive Optimal Path Following For High Wind FlightsDocument6 pagesAdaptive Optimal Path Following For High Wind FlightsirqoviNo ratings yet
- 4.engineering-Correction of The Mechanical Speed For The Dfig Wind TurbineDocument10 pages4.engineering-Correction of The Mechanical Speed For The Dfig Wind TurbineImpact JournalsNo ratings yet
- Electromagnetic Levitation System: An Experimental ApproachDocument7 pagesElectromagnetic Levitation System: An Experimental Approachsh1n00b1No ratings yet
- Nonlinear Discrete-Time Integral Sliding Mode Control of An Induction Motor: Real-Time ImplementationDocument10 pagesNonlinear Discrete-Time Integral Sliding Mode Control of An Induction Motor: Real-Time Implementationdamaya1701No ratings yet
- Valioso1 PDFDocument7 pagesValioso1 PDFdaya_lz92No ratings yet
- Control SystemsDocument6 pagesControl SystemsEngr Faisal Saleem JanjuaNo ratings yet
- Optimal PID Controller Design of An Inverted Pendulum Dynamics A Hybrid Pole-Placement and Firefly Algorithm ApproachDocument6 pagesOptimal PID Controller Design of An Inverted Pendulum Dynamics A Hybrid Pole-Placement and Firefly Algorithm ApproachAraceli CastruitaNo ratings yet
- Damping of Inter-Area Mode Oscillations by H Loop Shaping Technique Based UPFC ControllerDocument6 pagesDamping of Inter-Area Mode Oscillations by H Loop Shaping Technique Based UPFC ControllerRAJESH KUMARNo ratings yet
- MainDocument6 pagesMainVishal BhanderiNo ratings yet
- Mini Problem s2 2023Document5 pagesMini Problem s2 2023Annette TageufoueNo ratings yet
- Adaptive Altitude Control For A Small Helicopter in A Vertical Stand-Alejandro DzulDocument6 pagesAdaptive Altitude Control For A Small Helicopter in A Vertical Stand-Alejandro DzulskfrankoNo ratings yet
- 2020 TacchiDocument8 pages2020 TacchiJéssica FeitosaNo ratings yet
- Pawar 2015Document6 pagesPawar 2015shijumon8055No ratings yet
- Quasi-Physical Modeling of Robot IRB 120 Using SimDocument17 pagesQuasi-Physical Modeling of Robot IRB 120 Using SimManh Nguyen TienNo ratings yet
- Controller Design For Mechatronic Rotary Inverted Pendulum Part 1 and Part 2Document15 pagesController Design For Mechatronic Rotary Inverted Pendulum Part 1 and Part 2Nesibe Nur ÇamNo ratings yet
- wavelet 5Document6 pageswavelet 5shantanuNo ratings yet
- DTC Backstepping Based Control of Double Fed Induction GeneratorDocument6 pagesDTC Backstepping Based Control of Double Fed Induction GeneratorGzam RaïfaNo ratings yet
- Second-Order Sliding-Mode Control of Container Cranes: Brief Paper Giorgio Bartolini, Alessandro Pisano, Elio UsaiDocument8 pagesSecond-Order Sliding-Mode Control of Container Cranes: Brief Paper Giorgio Bartolini, Alessandro Pisano, Elio UsaijavbejaranoNo ratings yet
- Control AllocationDocument6 pagesControl AllocationMiguel AlonsoNo ratings yet
- Control Design and Dynamic Performance Analysis of A Wind TurbinDocument5 pagesControl Design and Dynamic Performance Analysis of A Wind TurbinMdzayd EL FahimeNo ratings yet
- Study On Control of Inverted Pendulum System Based On Simulink SimulationDocument9 pagesStudy On Control of Inverted Pendulum System Based On Simulink SimulationPriyanka KilaniyaNo ratings yet
- An Algorithm For Robust Noninteracting Control of Ship Propulsion SystemDocument8 pagesAn Algorithm For Robust Noninteracting Control of Ship Propulsion SystemmohammadfarsiNo ratings yet
- Interconnection and Damping Assignment Passivity-Based Experimental Control of A Single-Link Exible Robot ArmDocument6 pagesInterconnection and Damping Assignment Passivity-Based Experimental Control of A Single-Link Exible Robot ArminfodotzNo ratings yet
- FPGA Adaptive CTL LawsDocument6 pagesFPGA Adaptive CTL Lawsabdou_scribdNo ratings yet
- Optimal Space Flight NavigationDocument277 pagesOptimal Space Flight Navigationmoafr100% (1)
- Active FiltersDocument35 pagesActive FiltersSharmiladevy PrasannaNo ratings yet
- Manual For Flow ControlDocument4 pagesManual For Flow ControlReeve Tang CsvNo ratings yet
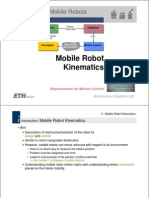
- Mobile Robot KinematicsDocument22 pagesMobile Robot Kinematicsdtungtnt167No ratings yet
- Introduction To Process ControlDocument19 pagesIntroduction To Process ControlTamoor TariqNo ratings yet
- Design of FIR Filters: The Filter Design ProblemDocument44 pagesDesign of FIR Filters: The Filter Design ProblemDominiqueNo ratings yet
- Aircraft Electric Anti-Skid Braking and Combined Direction Control System Using Co-Simulation and Experimental MethodsDocument19 pagesAircraft Electric Anti-Skid Braking and Combined Direction Control System Using Co-Simulation and Experimental Methodskarthik karunanidhiNo ratings yet
- IPC TextbookDocument389 pagesIPC TextbookSunilrachaNo ratings yet
- s71500 Pid Control Function Manual en-US en-US PDFDocument618 pagess71500 Pid Control Function Manual en-US en-US PDFThiago WerneckNo ratings yet
- Second Year Engineering: B.Tech (Electrical Engineering) Syllabus For Admission Batch 2015-16Document76 pagesSecond Year Engineering: B.Tech (Electrical Engineering) Syllabus For Admission Batch 2015-16ବିଭୁତି ଭୁଷଣ ବେହେରାNo ratings yet
- RR Icon DP2 User ManDocument226 pagesRR Icon DP2 User ManCindyNo ratings yet
- Scada Scope Item Description PLC/Automation Total Devices Conectivity ProtocolDocument2 pagesScada Scope Item Description PLC/Automation Total Devices Conectivity Protocolwaqasasad408No ratings yet
- Modeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoDocument13 pagesModeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoJoseph JoseNo ratings yet
- Expt 6 Block Diagram ReductionDocument5 pagesExpt 6 Block Diagram ReductionAngelo Legarda De CastroNo ratings yet
- Siso-Gpcit: Generalized Predictive ControlDocument43 pagesSiso-Gpcit: Generalized Predictive ControlsalgulsenNo ratings yet
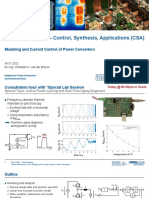
- 2022 01 06 LECTURE 9 ModelingAndCurrentControlDocument62 pages2022 01 06 LECTURE 9 ModelingAndCurrentControlYves DuforezNo ratings yet
- Control Design For An Industrial BoilerDocument6 pagesControl Design For An Industrial BoilerEmon AzriadiNo ratings yet
- DEsign and Implementation of PID On FPGADocument6 pagesDEsign and Implementation of PID On FPGAdhirendraNo ratings yet
- Past Boards 2011 2017Document18 pagesPast Boards 2011 2017AkiNo ratings yet
- Ropot CarDocument46 pagesRopot Carmjd rNo ratings yet
- Malik Waqas Saeed: Get in ContactDocument3 pagesMalik Waqas Saeed: Get in ContactWaqas SaeedNo ratings yet
- Two Degrees of Freedom Fractional Controller Design - Application To The Ball and Beam SystemDocument10 pagesTwo Degrees of Freedom Fractional Controller Design - Application To The Ball and Beam SystemdiegoNo ratings yet
- 1fuzzy LogicDocument5 pages1fuzzy LogicZelalem TarekegnNo ratings yet
- Jenbacher: 1. Leanox® Controller: - 1Document3 pagesJenbacher: 1. Leanox® Controller: - 1ArîfNo ratings yet
- Control System TechnologyDocument106 pagesControl System TechnologyRisimic NebojsaNo ratings yet
- Artigo DRTDocument5 pagesArtigo DRTJabulani2010No ratings yet
- Transfer Function Extraction With SCILABDocument25 pagesTransfer Function Extraction With SCILABefybatNo ratings yet
- Hawcstab2 User ManualDocument38 pagesHawcstab2 User ManualMahmoud MoussaNo ratings yet
- Idc Engineers Pocket Guide - Instrumentation 3rd Ed (Automation Using PLCS, Telemetry, Process Control, Data Acquisition)Document59 pagesIdc Engineers Pocket Guide - Instrumentation 3rd Ed (Automation Using PLCS, Telemetry, Process Control, Data Acquisition)neno2405No ratings yet
- EC2255 Control Systems QBDocument16 pagesEC2255 Control Systems QBjenath1No ratings yet
























































































Download as pdf or txt
You might also like
- 2-DOF Helicopter Controlling by Pole-PlacementsDocument5 pages2-DOF Helicopter Controlling by Pole-PlacementsosdacavNo ratings yet
- Modelling, Identification and Control of A 2 DOF Helicopter PrototypeDocument6 pagesModelling, Identification and Control of A 2 DOF Helicopter PrototypeosdacavNo ratings yet
- Model Predictive Control of A Two-Link Robot Arm: El-Hadi GUECHI Samir Bouzoualegh Lotfi Messikh Sašo BlažicDocument6 pagesModel Predictive Control of A Two-Link Robot Arm: El-Hadi GUECHI Samir Bouzoualegh Lotfi Messikh Sašo BlažicAzeddine DemNo ratings yet
- Symbolic Pole Assignment of 2dof Conventional Helicopter: Tarõk Veli Mumcu Kutluhan Kürúat ÇandõrDocument5 pagesSymbolic Pole Assignment of 2dof Conventional Helicopter: Tarõk Veli Mumcu Kutluhan Kürúat ÇandõrosdacavNo ratings yet
- Model and Observer-Based Controller Design For A Quanser Helicopter With Two DOFDocument5 pagesModel and Observer-Based Controller Design For A Quanser Helicopter With Two DOFosdacavNo ratings yet
- Actuators: Getting Started With Peas-Based Flapping-Wing Mechanisms For Micro Aerial SystemsDocument17 pagesActuators: Getting Started With Peas-Based Flapping-Wing Mechanisms For Micro Aerial SystemsArman AsgharpoorNo ratings yet
- Observer Based Output Feedback Tracking Control of Robot ManipulatorsDocument6 pagesObserver Based Output Feedback Tracking Control of Robot ManipulatorsberkeogulcanparlakNo ratings yet
- Dynamic Modelling and Experimental Identification of Four Rotors Helicopter ParametersDocument7 pagesDynamic Modelling and Experimental Identification of Four Rotors Helicopter Parametersali.azim1380No ratings yet
- PID Controller Design For A Magnetic Levitation System Using An IntelligentDocument8 pagesPID Controller Design For A Magnetic Levitation System Using An Intelligentambachew bizunehNo ratings yet
- Modeling and Altitude Control of Quad-Rotor UAVDocument6 pagesModeling and Altitude Control of Quad-Rotor UAVescanusNo ratings yet
- Fairus_2013_IOP_Conf._Ser.%3A_Mater._Sci._Eng._53_012009-2Document11 pagesFairus_2013_IOP_Conf._Ser.%3A_Mater._Sci._Eng._53_012009-2Miguel AmadorNo ratings yet
- 10 1109ceit 2016 7929049Document5 pages10 1109ceit 2016 7929049KarimNo ratings yet
- Optimal FOPI-FOPD Controller Design For Rotary Inverted Pendulum System Using Grey Wolves' Optimization TechniqueDocument10 pagesOptimal FOPI-FOPD Controller Design For Rotary Inverted Pendulum System Using Grey Wolves' Optimization TechniqueTELKOMNIKANo ratings yet
- PID Vs LQ Control Techniques Applied To An Indoor Micro QuadrotorDocument6 pagesPID Vs LQ Control Techniques Applied To An Indoor Micro QuadrotorAlexandreSidantNo ratings yet
- Twin Rotor Mimo System: Experiment No: 5Document8 pagesTwin Rotor Mimo System: Experiment No: 5sameer sultanNo ratings yet
- Nonlinear Predictive Control of a Tower CraneDocument5 pagesNonlinear Predictive Control of a Tower Cranehồng sơnNo ratings yet
- Regulatory Control of Quadcopter by Designing Third Order SMC ControllerDocument8 pagesRegulatory Control of Quadcopter by Designing Third Order SMC ControllerMebaye BeleteNo ratings yet
- Ica20110200012 71434152Document7 pagesIca20110200012 71434152Lê Tuấn MinhNo ratings yet
- stavrakakis1988Document4 pagesstavrakakis1988caxov16116No ratings yet
- Eea 62 3 2014 103 EN LP 000 PDFDocument7 pagesEea 62 3 2014 103 EN LP 000 PDFhamza gaNo ratings yet
- Synergetic and Sliding Mode Controls of A PMSM: A Comparative StudyDocument5 pagesSynergetic and Sliding Mode Controls of A PMSM: A Comparative StudymellahNo ratings yet
- 390-Article Text-738-1-10-20200709Document6 pages390-Article Text-738-1-10-20200709EsmfNo ratings yet
- Full Control of A QuadrotorDocument6 pagesFull Control of A QuadrotorLuis Orlando Silva VásquezNo ratings yet
- Reconfigurability Analysis of Multirotor UAVsDocument21 pagesReconfigurability Analysis of Multirotor UAVsMarco LoveraNo ratings yet
- Controller Design For A Twin Rotor Helicopter Model Via Exact State Feedback LinearizationDocument6 pagesController Design For A Twin Rotor Helicopter Model Via Exact State Feedback LinearizationSaurabh SharmaNo ratings yet
- Design of Formation Controller Based On BP Neural Network PID ControlDocument9 pagesDesign of Formation Controller Based On BP Neural Network PID Controlsajad soleymanzadeNo ratings yet
- Guassian Process of MPCDocument16 pagesGuassian Process of MPCSai NavaneetNo ratings yet
- DIGITAL INTEGRATIVE LQR CONTROL OF A 2DOF HELICOPTERDocument6 pagesDIGITAL INTEGRATIVE LQR CONTROL OF A 2DOF HELICOPTERPatrick NasserNo ratings yet
- Hectorguillermo 2018Document6 pagesHectorguillermo 2018vishal BhoknalNo ratings yet
- Lars 2008 26Document6 pagesLars 2008 262532909567No ratings yet
- Electronics 08 00221Document13 pagesElectronics 08 00221AMAN GOYALNo ratings yet
- Furuta 1992Document6 pagesFuruta 1992LÊ ĐẠI HIỆPNo ratings yet
- Optimization of Model Reference Adaptive Controller For The Inverted Pendulum System Using CCPSO and DE AlgorithmsDocument12 pagesOptimization of Model Reference Adaptive Controller For The Inverted Pendulum System Using CCPSO and DE AlgorithmsjanitoNo ratings yet
- A Simulink Environment For Simulation and Control of Flexible Manipulator SystemsDocument6 pagesA Simulink Environment For Simulation and Control of Flexible Manipulator SystemsselvamNo ratings yet
- Problems 7Document6 pagesProblems 7soumyadeeptaNo ratings yet
- Adaptive Optimal Path Following For High Wind FlightsDocument6 pagesAdaptive Optimal Path Following For High Wind FlightsirqoviNo ratings yet
- 4.engineering-Correction of The Mechanical Speed For The Dfig Wind TurbineDocument10 pages4.engineering-Correction of The Mechanical Speed For The Dfig Wind TurbineImpact JournalsNo ratings yet
- Electromagnetic Levitation System: An Experimental ApproachDocument7 pagesElectromagnetic Levitation System: An Experimental Approachsh1n00b1No ratings yet
- Nonlinear Discrete-Time Integral Sliding Mode Control of An Induction Motor: Real-Time ImplementationDocument10 pagesNonlinear Discrete-Time Integral Sliding Mode Control of An Induction Motor: Real-Time Implementationdamaya1701No ratings yet
- Valioso1 PDFDocument7 pagesValioso1 PDFdaya_lz92No ratings yet
- Control SystemsDocument6 pagesControl SystemsEngr Faisal Saleem JanjuaNo ratings yet
- Optimal PID Controller Design of An Inverted Pendulum Dynamics A Hybrid Pole-Placement and Firefly Algorithm ApproachDocument6 pagesOptimal PID Controller Design of An Inverted Pendulum Dynamics A Hybrid Pole-Placement and Firefly Algorithm ApproachAraceli CastruitaNo ratings yet
- Damping of Inter-Area Mode Oscillations by H Loop Shaping Technique Based UPFC ControllerDocument6 pagesDamping of Inter-Area Mode Oscillations by H Loop Shaping Technique Based UPFC ControllerRAJESH KUMARNo ratings yet
- MainDocument6 pagesMainVishal BhanderiNo ratings yet
- Mini Problem s2 2023Document5 pagesMini Problem s2 2023Annette TageufoueNo ratings yet
- Adaptive Altitude Control For A Small Helicopter in A Vertical Stand-Alejandro DzulDocument6 pagesAdaptive Altitude Control For A Small Helicopter in A Vertical Stand-Alejandro DzulskfrankoNo ratings yet
- 2020 TacchiDocument8 pages2020 TacchiJéssica FeitosaNo ratings yet
- Pawar 2015Document6 pagesPawar 2015shijumon8055No ratings yet
- Quasi-Physical Modeling of Robot IRB 120 Using SimDocument17 pagesQuasi-Physical Modeling of Robot IRB 120 Using SimManh Nguyen TienNo ratings yet
- Controller Design For Mechatronic Rotary Inverted Pendulum Part 1 and Part 2Document15 pagesController Design For Mechatronic Rotary Inverted Pendulum Part 1 and Part 2Nesibe Nur ÇamNo ratings yet
- wavelet 5Document6 pageswavelet 5shantanuNo ratings yet
- DTC Backstepping Based Control of Double Fed Induction GeneratorDocument6 pagesDTC Backstepping Based Control of Double Fed Induction GeneratorGzam RaïfaNo ratings yet
- Second-Order Sliding-Mode Control of Container Cranes: Brief Paper Giorgio Bartolini, Alessandro Pisano, Elio UsaiDocument8 pagesSecond-Order Sliding-Mode Control of Container Cranes: Brief Paper Giorgio Bartolini, Alessandro Pisano, Elio UsaijavbejaranoNo ratings yet
- Control AllocationDocument6 pagesControl AllocationMiguel AlonsoNo ratings yet
- Control Design and Dynamic Performance Analysis of A Wind TurbinDocument5 pagesControl Design and Dynamic Performance Analysis of A Wind TurbinMdzayd EL FahimeNo ratings yet
- Study On Control of Inverted Pendulum System Based On Simulink SimulationDocument9 pagesStudy On Control of Inverted Pendulum System Based On Simulink SimulationPriyanka KilaniyaNo ratings yet
- An Algorithm For Robust Noninteracting Control of Ship Propulsion SystemDocument8 pagesAn Algorithm For Robust Noninteracting Control of Ship Propulsion SystemmohammadfarsiNo ratings yet
- Interconnection and Damping Assignment Passivity-Based Experimental Control of A Single-Link Exible Robot ArmDocument6 pagesInterconnection and Damping Assignment Passivity-Based Experimental Control of A Single-Link Exible Robot ArminfodotzNo ratings yet
- FPGA Adaptive CTL LawsDocument6 pagesFPGA Adaptive CTL Lawsabdou_scribdNo ratings yet
- Optimal Space Flight NavigationDocument277 pagesOptimal Space Flight Navigationmoafr100% (1)
- Active FiltersDocument35 pagesActive FiltersSharmiladevy PrasannaNo ratings yet
- Manual For Flow ControlDocument4 pagesManual For Flow ControlReeve Tang CsvNo ratings yet
- Mobile Robot KinematicsDocument22 pagesMobile Robot Kinematicsdtungtnt167No ratings yet
- Introduction To Process ControlDocument19 pagesIntroduction To Process ControlTamoor TariqNo ratings yet
- Design of FIR Filters: The Filter Design ProblemDocument44 pagesDesign of FIR Filters: The Filter Design ProblemDominiqueNo ratings yet
- Aircraft Electric Anti-Skid Braking and Combined Direction Control System Using Co-Simulation and Experimental MethodsDocument19 pagesAircraft Electric Anti-Skid Braking and Combined Direction Control System Using Co-Simulation and Experimental Methodskarthik karunanidhiNo ratings yet
- IPC TextbookDocument389 pagesIPC TextbookSunilrachaNo ratings yet
- s71500 Pid Control Function Manual en-US en-US PDFDocument618 pagess71500 Pid Control Function Manual en-US en-US PDFThiago WerneckNo ratings yet
- Second Year Engineering: B.Tech (Electrical Engineering) Syllabus For Admission Batch 2015-16Document76 pagesSecond Year Engineering: B.Tech (Electrical Engineering) Syllabus For Admission Batch 2015-16ବିଭୁତି ଭୁଷଣ ବେହେରାNo ratings yet
- RR Icon DP2 User ManDocument226 pagesRR Icon DP2 User ManCindyNo ratings yet
- Scada Scope Item Description PLC/Automation Total Devices Conectivity ProtocolDocument2 pagesScada Scope Item Description PLC/Automation Total Devices Conectivity Protocolwaqasasad408No ratings yet
- Modeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoDocument13 pagesModeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoJoseph JoseNo ratings yet
- Expt 6 Block Diagram ReductionDocument5 pagesExpt 6 Block Diagram ReductionAngelo Legarda De CastroNo ratings yet
- Siso-Gpcit: Generalized Predictive ControlDocument43 pagesSiso-Gpcit: Generalized Predictive ControlsalgulsenNo ratings yet
- 2022 01 06 LECTURE 9 ModelingAndCurrentControlDocument62 pages2022 01 06 LECTURE 9 ModelingAndCurrentControlYves DuforezNo ratings yet
- Control Design For An Industrial BoilerDocument6 pagesControl Design For An Industrial BoilerEmon AzriadiNo ratings yet
- DEsign and Implementation of PID On FPGADocument6 pagesDEsign and Implementation of PID On FPGAdhirendraNo ratings yet
- Past Boards 2011 2017Document18 pagesPast Boards 2011 2017AkiNo ratings yet
- Ropot CarDocument46 pagesRopot Carmjd rNo ratings yet
- Malik Waqas Saeed: Get in ContactDocument3 pagesMalik Waqas Saeed: Get in ContactWaqas SaeedNo ratings yet
- Two Degrees of Freedom Fractional Controller Design - Application To The Ball and Beam SystemDocument10 pagesTwo Degrees of Freedom Fractional Controller Design - Application To The Ball and Beam SystemdiegoNo ratings yet
- 1fuzzy LogicDocument5 pages1fuzzy LogicZelalem TarekegnNo ratings yet
- Jenbacher: 1. Leanox® Controller: - 1Document3 pagesJenbacher: 1. Leanox® Controller: - 1ArîfNo ratings yet
- Control System TechnologyDocument106 pagesControl System TechnologyRisimic NebojsaNo ratings yet
- Artigo DRTDocument5 pagesArtigo DRTJabulani2010No ratings yet
- Transfer Function Extraction With SCILABDocument25 pagesTransfer Function Extraction With SCILABefybatNo ratings yet
- Hawcstab2 User ManualDocument38 pagesHawcstab2 User ManualMahmoud MoussaNo ratings yet
- Idc Engineers Pocket Guide - Instrumentation 3rd Ed (Automation Using PLCS, Telemetry, Process Control, Data Acquisition)Document59 pagesIdc Engineers Pocket Guide - Instrumentation 3rd Ed (Automation Using PLCS, Telemetry, Process Control, Data Acquisition)neno2405No ratings yet
- EC2255 Control Systems QBDocument16 pagesEC2255 Control Systems QBjenath1No ratings yet