Professional Documents
Culture Documents
Dynamics of Structures: Jorma K. Arros
Dynamics of Structures: Jorma K. Arros
Uploaded by
Fioz AriyandiOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Dynamics of Structures: Jorma K. Arros
Dynamics of Structures: Jorma K. Arros
Uploaded by
Fioz AriyandiCopyright:
Available Formats
0068_C03_fm Page 1 Tuesday, August 13, 2002 7:47 AM
3
Dynamics
of Structures
3.1 Introduction
3.2 Single-Degree-of-Freedom System
Equation of Motion · Solution of the Equation of Motion
· Evaluation of Damping in SDOF Systems · Response to
Impulsive Loads · Approximate Analysis of Impulsive-Load
Response · Duhamel Integral · Response to Periodic Loading
3.3 Multidegree-of-Freedom Systems
Equations of Motion · Vibration Mode Shapes and Frequencies
· Modal Equations of Motion · Earthquake Response Analysis
Jorma K. Arros · Nonlinear Analysis
ABS Consulting Defining Terms
Oakland, CA References
3.1 Introduction
The essence of earthquake effects on structures is the dynamic nature of earthquake loading. This section
provides an overview of the dynamics of structures, as a foundation for succeeding sections.
Mechanics as a branch of physics is subdivided into statics and dynamics. Statics studies systems in
static equilibrium, i.e., in a state where the system internal forces counterbalance external forces acting
on the system. Static refers to the fact that the state of the system and the applied forces do not vary in
time; they are time-independent. Dynamics is the study of systems subject to time-varying applied forces.
As a consequence of the time variability of the applied forces, the system’s internal forces and its state
(defined in terms of displacement and deformation) also vary with time — the system’s response involves
motion. While a static problem has a single time-independent solution, the solution of a dynamic problem
involves a description of the system’s state at every time point within the period of study. The appearance
of inertia effects associated with mass in motion is another key distinction of dynamic problems.
Structural dynamics can be considered as the study of a body or structure in dynamic equilibrium.
The mathematical expression of this equilibrium is the equation of motion. While the static equilibrium
equation expresses the balance between the structure’s internal forces and externally applied forces, the
equation of motion expresses the equilibrium of internal and external force terms (which are exactly the
same as in the static equilibrium equation) and the mass inertia and damping effects. As the inertia term
involves the second derivative and the damping term the first derivative of the displacement with respect
to time, the equation of motion is a second-order differential equation with constant coefficients. Theory
© 2003 by CRC Press LLC
0068_C03_fm Page 2 Tuesday, July 30, 2002 8:32 AM
3-2 Earthquake Engineering Handbook
for this type of differential equation is well established in mathematics and provides ready tools, both
analytic and numerical, for solution of structural dynamics problems.
This chapter begins the discussion with the dynamics of a single-degree-of-freedom (SDOF) system
in Section 3.2. Dynamics of multidegree-of-freedom (MDOF) systems is discussed in Section 3.3. Typical
aspects of dynamic analysis specific to earthquakes are discussed in Section 3.3.4, while dynamic analysis
of nonlinear systems is reviewed briefly in Section 3.3.5. The discussion of dynamics in this chapter
specifically addresses response of structures to seismic ground motion.
3.2 Single-Degree-of-Freedom System
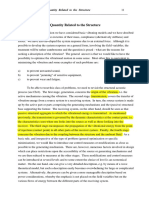
This section examines the single-degree-of-freedom (SDOF) system sketched in Figure 3.1. The SDOF
system consists of a rigid block with mass m, elastic weightless spring with stiffness k, and a viscous
damper c. The mass block of the SDOF system can move only in translation along a single line, with the
displacement from the initial, static equilibrium position, denoted as variable u, completely defining its
position. Time-varying load p(t) acts on the mass block, causing the dynamic response.
3.2.1 Equation of Motion
The equation of motion is derived by expressing the equilibrium of all forces acting on the mass. As
shown in Figure 3.1, the forces acting in the direction of the displacement degree of freedom include the
applied load p(t) and three forces resulting from the motion: inertia f1, damping fD , and the elastic
spring force fS. The equilibrium of these forces is written as:
f1 + f D + fS = p (t ) (3.1)
Each of the forces represented on the left side of this equation is a function of the displacement u, or
of its derivatives as follows.
Per d’Alembert’s principle, the inertia force is:
f1 = mu˙˙ (3.2)
Viscous damping force:
f D = cu˙ (3.3)
Spring force:
fS = ku (3.4)
FIGURE 3.1 Single-degree-of-freedom system and a free body diagram of the mass block.
© 2003 by CRC Press LLC
0068_C03_fm Page 3 Tuesday, August 13, 2002 7:48 AM
Dynamics of Structures 3-3
By substituting Equations 3.2, 3.3, and 3.4 in Equation 3.1, the equation of motion of the SDOF system
is written as:
mu˙˙ + cu˙ + ku = p (t ) (3.5)
3.2.1.1 Equation of Motion for Support Excitation Loading
Instead of the time-varying applied force, dynamic loading to a system may be caused by motion of its
support points. The motion forced by an earthquake on a building foundation, illustrated in Figure 3.2,
is an example of such a loading. The horizontal ground motion relative to the fixed reference axis is
indicated by the displacement ug.
As in Equation 3.1, equilibrium of forces for this system may be written:
f1 + f D + fS = p (t ) (3.6)
where the damping and elastic forces may be expressed as in Equations 3.3 and 3.4, except that the
expressions are now in terms of the relative displacement ur , i.e., displacement relative to a frame of
reference attached to the support points that are moving relative to the reference axis. The inertia force
in this case is given by:
f1 = mu˙˙t (3.7)
where ut represents the total displacement of the mass from the reference axis and is equal to the sum
of the relative displacement and the ground motion:
ut = ur + u g (3.8)
Substituting for the inertia, damping, and elastic forces in Equation 3.6 yields:
mu˙˙t + cu˙ r + kur = 0 (3.9)
Substituting Equation 3.8 in Equation 3.9 yields:
mu˙˙r + cu˙ r + kur = −mu˙˙g (t ) ≡ peff (t ) (3.10)
FIGURE 3.2 (a) Support point excitation and (b) the free body diagram of the mass.
© 2003 by CRC Press LLC
0068_C03_fm Page 4 Tuesday, July 30, 2002 8:32 AM
3-4 Earthquake Engineering Handbook
In this equation, peff (t) denotes the effective support excitation loading. By comparing Equations 3.5
and 3.10, it can be concluded that the relative motion of the system, ur(t), excited by support point
motion üg(t), will be the same as the total motion of a fixed base system, u(t), acted upon by a force
equal to peff (t) = –müg(t).
3.2.2 Solution of the Equation of Motion
To determine the response, u(t), of the SDOF system, the equation of motion is solved using either
analytical or numerical methods. The choice of method may depend on the following considerations:
• Whether the problem is linear or nonlinear — nonlinear problems typically call for numerical
solutions.
• Type of loading function, certain types of loading being more tractable analytically than others.
For example, representation of an actual earthquake acceleration history analytically is not prac-
tical, and a numerical solution is called for.
• Level of accuracy of the solution desired. Analytical solutions are typically in terms of exact closed-
form formulas or in terms of infinite series, such as Fourier series, that achieve any level of desired
accuracy by inclusion of an adequate number of the series terms. Solutions derived using numerical
methods are typically approximate, but often adequate for practical problems.
In some cases solution in the frequency domain, instead of the time domain, is preferred. Conceptually
this approach consists of:
1. Transforming the loading function p(t) (or –müg[t] ≡ peff [t]) to the frequency domain via the
Fourier transformation
2. Obtaining the Fourier transformation of the response
3. Performing the inverse Fourier transform (i.e., back to the time domain) to obtain the response u(t)
Fourier analysis became quite practical with the advent of the fast Fourier transform (FFT) several
decades ago.
The analytical solution of the equation of motion is discussed in Section 3.2.2, numerical time history
analysis procedures are discussed in Section 3.3.4.2, and solution in the frequency domain is introduced
in Section 3.2.7.1
As for any linear differential equation, the complete, general solution is the sum of complementary
solution uc(t) and the particular solution up(t), i.e.,
u (t ) = uc (t ) + u p (t ) (3.11)
Since the equation of motion is a second-order differential equation, the complementary solution has
two constants of integration that are evaluated based on the initial conditions, i.e., u(0) and u· (0).
The complementary solution is the solution of the homogeneous equation, i.e., the equation of motion
with the right-hand side set equal to zero:
mu˙˙ (t ) + cu˙ (t ) + ku (t ) = 0 (3.12)
Motions that satisfy Equation 3.12, with no forcing function, are referred to as free vibrations. The
solution of Equation 3.12, as of any linear homogeneous ordinary differential equation with constant
coefficients, is of the form:
u (t ) = Ce st (3.13)
Substituting this into Equation 3.12, and after dividing by Cest, leads to the characteristic equation:
ms 2 + cs + k = 0 (3.14)
© 2003 by CRC Press LLC
0068_C03_fm Page 5 Tuesday, July 30, 2002 8:32 AM
Dynamics of Structures 3-5
Using the notation:
k
ω2 = (3.15)
m
s is solved:
2
c c
s=− ± −ω
2
(3.16)
2m 2m
It is evident from Equation 3.16 that the nature of the solution will depend on the damping value c.
If c > 2mω, s will be real valued, but if c < 2mω, s will be a complex number. How this affects the response
will be explored in the following sections.
3.2.2.1 Undamped Free Vibrations
If the system is undamped, i.e., if c = 0, s becomes, by Equation 3.16:
s = ±iω (3.17)
and the response given by Equation 3.13 is:
u (t ) = C1e iωt + C 2e − iωt (3.18)
As both of the terms on the right-hand side, irrespective of the values C1 and C2, are solutions to
Equation 3.12 and the equation is linear, the sum is also a solution. As we are looking for the general
solution, both terms are included.
By utilizing Euler’s equation:
e ± iωt = cos ωt ± i sin ωt (3.19)
The result may be written in the form:
u (t ) = A sin ωt + B cos ωt (3.20)
This type of motion is called a simple harmonic motion. The quantity ω is the natural angular
velocity of the undamped system (sometimes also referred to as the natural angular frequency) and is
related to natural frequency f as:
ω
f = (3.21)
2π
The reciprocal of f is called the natural period T:
2π 1
T= = (3.22)
ω f
Constants A and B are determined based on the initial conditions: the displacement u(0) = B and
·
velocity u(0) = Aωt at time t = 0, resulting in:
u˙ (0)
u (t ) = sin ωt + u (0) cos ωt (3.23)
ω
Figure 3.3 illustrates this solution.
© 2003 by CRC Press LLC
0068_C03_fm Page 6 Tuesday, July 30, 2002 8:32 AM
3-6 Earthquake Engineering Handbook
FIGURE 3.3 Undamped free vibration.
By utilizing the relationships of the trigonometric sine and cosine functions, the motion u(t) of
Equation 3.23 can be recast into:
u (t ) = R cos (ωt − θ) (3.24)
The response is given by the real part, or horizontal projection, of the two rotating vectors. Thus, the
amplitude of motion is given by the resultant:
u˙ (0)
2
[u (0)]
2
R= + (3.25)
ω
and the phase angle by:
u˙ (0)
θ = tan −1 (3.26)
ωu(0)
3.2.2.2 Damped Free Vibrations
If the oscillator is damped, i.e., c > 0, three different types of motion are possible, depending on whether
the value of the term under the square root in the expression for s (Equation 3.16):
2
c c
s=− ± −ω
2
(3.16)
2m 2m
is zero, negative, or positive, as discussed in the following.
3.2.2.2.1 Critical Damping
The value of c that makes the value of the term under the square root in Equation 3.16 equal to zero is
called the critical damping, cc, i.e.,
c c = 2 mω (3.27)
At critical damping, the value of s in Equation 3.16 becomes:
cc
s=− = −ω (3.28)
2m
© 2003 by CRC Press LLC
0068_C03_fm Page 7 Tuesday, July 30, 2002 8:32 AM
Dynamics of Structures 3-7
so that the response is given by:
u (t ) = (C1 + C 2t ) e − ωt (3.29)
which is easily verified by substituting in Equation 3.12. By imposing the initial conditions the response
is written as:
[ ]
u (t ) = u (0) (1 + ωt ) + u˙ (0) t e − ωt (3.30)
It is readily observed from Equation 3.30 that the critically damped response does not involve oscil-
lations about the zero deflection point and the displacement returns to zero in accordance with the
exponential decay term. Critical damping is the smallest amount of damping that keeps a SDOF system
from oscillating during free response.
3.2.2.2.2 Underdamped Systems
If the damping is less than critical, i.e., c < 2mω, it is customary to express the damping as a ratio to the
critical damping value:
c c
ξ= = (3.31)
c c 2 mω
where ξ is called the damping ratio. Substituting Equation 3.31 into Equation 3.16 leads to:
s = −ξω ± (ξω)2 − ω 2 (3.32)
By using the notation ω D = ω 1 − ξ 2 Equation 3.32 can be rewritten as:
s = −ξω ± iω D (3.33)
ωD is called the damped vibration frequency. Note that for typical structures damping ratios rarely exceed
about 10% (ξ < 0.10), and ωD differs very little from the undamped natural frequency.
By substituting to Equation 3.13, the response is written as:
(
u (t ) = e − ξωt C1e iωDt + C 2e − iωDt ) (3.34)
By using Euler’s equation, the response can be written in the form:
u(t ) = e −ξωt (A sin ω Dt + B cos ω Dt ) (3.35)
The second term in Equation 3.35 is of the same form as the simple harmonic motion of the undamped
oscillator, Equation 3.20, except now at the damped, slightly lower frequency. The first term in Equation
3.35 indicates exponential attenuation of the oscillations. Constants of integration A and B are again
·
determined based on the initial conditions u(0) and u(0) as before.
3.2.2.3 Harmonic Loading
The particular solution is a solution that satisfies the equation of motion with the loading included on
the right-hand side of the equation, Equation 3.5:
mu˙˙ (t ) + cu˙ (t ) + ku (t ) = p (t )
© 2003 by CRC Press LLC
0068_C03_fm Page 8 Tuesday, July 30, 2002 8:32 AM
3-8 Earthquake Engineering Handbook
The particular solution is particular to the loading function. As the first case, the response of the SDOF
system to a harmonic forcing function is studied. The equation of motion is written as:
mu˙˙ (t ) + cu˙ (t ) + ku (t ) = p0 sin ω pt (3.36)
where p0 is the amplitude and ωp the angular velocity of the loading.
3.2.2.3.1 Non-Damped SDOF System
Again, damping is first assumed to be zero, i.e., the equation of motion is written as:
mu˙˙ (t ) + ku (t ) = p0 sin ω pt (3.37)
The complementary solution of this equation is the free-vibration response of Equation 3.20.
In this case, the particular solution can be found by “guessing” that the solution is in the form of
harmonic motion, i.e.,
u p (t ) = C sinω pt (3.38)
By substituting this “trial” solution in Equation 3.37, C is solved as:
p0 1
C= (3.39)
( )
2
k 1− ω ω
p
and the particular solution is:
p0 1
u p (t ) = sin ω p t (3.40)
k 1− ω ω 2
p ( )
The general solution is the combination of the complementary solution, Equation 3.20, and the
particular solution, Equation 3.40:
p0 1
u (t ) = uc (t ) + u p (t ) = A sin ωt + B cos ωt + sin ω pt (3.41)
( )
2
k 1− ω ω
p
Again, constants A and B are solved based on initial conditions. For the specific case of a system that
·
is initially at rest, i.e., u(0) = 0 and u(0) = 0, the constants are readily solved as:
p0 ω p ω 1
A=−
( )
2
k 1− ωp ω (3.42)
B=0
and the expression for the response becomes:
u (t ) =
p0 1
(sin ω t − ω ω sin ωt ) (3.43)
( )
2 p p
k 1− ω ω
p
Note that the first term on the right-hand side of Equation 3.43, p0 /k, is the displacement, ust , which
force p0 would cause if applied statically. The rest of the right-hand side of Equation 3.43 is termed the
© 2003 by CRC Press LLC
0068_C03_fm Page 9 Tuesday, August 13, 2002 11:04 AM
Dynamics of Structures 3-9
response ratio, R(t), and expresses the momentary ratio of the total displacement to the static displace-
ment, i.e.,
u (t ) u (t )
R(t ) = = (3.44)
ust p0 k
3.2.2.3.2 Damped SDOF System
Next, the response of a SDOF system with damping is considered. The equation of motion, Equation
3.36, is:
mu˙˙ (t ) + cu˙ (t ) + ku (t ) = p0 sin ω pt (3.36)
Dividing by m, and using notation of Equation 3.31, i.e., c/m = 2ξω, leads to:
p0
u˙˙ (t ) + 2ξωu˙ (t ) + ω 2u (t ) = sin ω pt (3.45)
m
The complementary solution of this equation is the damped free-vibration response given by Equation
3.35 (assuming that the structure is less than critically damped, as is the case for all practical structures):
uc (t ) = e −ξω t ( A sin ω Dt + B cos ω Dt ) (3.46)
The particular solution can be found by substituting in Equation 3.45 the following “trial” solution:
u p (t ) = C1 sin ω pt + C 2 cos ω pt (3.47)
(or, alternatively, up (t) = C3 sin (ωp t – θ). Note that, in general, the response of a damped system is not
in phase with the loading.)
Coefficients C1 and C2 (or, alternatively, C3 and θ) can be solved readily by equating (1) those terms
that multiply sin ωpt and (2) those terms that multiply cos ωpt. The general solution is the combination
of the complementary solution, Equation 3.35, and the particular solution, Equation 3.47. After denoting
ωp/ω = α, the general solution is written as:
u (t ) = e −ξωt ( A sin ω Dt + B cos ω Dt ) +
p0
(
1
)
k 1 − α 2 2 + (2ξα )2 [( )
1 − α 2 sin ω pt − 2ξα cos ω pt ] (3.48)
As before, the constants A and B could be evaluated based on the initial conditions. However, as the
complementary solution is attenuated by the exponential function e−ξωt, and therefore typically diminishes
quickly, the exact determination of the complementary solution is often not called for. Also, consistent
with the fact that it typically diminishes quickly, the complementary solution is often referred to as the
transient response. The second term in Equation 3.48 does not diminish with time and is referred to as
the steady-state response. The steady-state response involves harmonic motion at a frequency equal to
that of the applied loading but out of phase with it as indicated by the presence of both the sin ωpt and
cos ωp t terms.
By manipulation of the trigonometric terms, the steady-state response of Equation 3.48 can be cast
to the following alternative form, directly indicating magnitude R and phase angle θ:
(
u (t ) = R sin ω pt − θ ) (3.49)
© 2003 by CRC Press LLC
0068_C03_fm Page 10 Tuesday, July 30, 2002 8:32 AM
3-10 Earthquake Engineering Handbook
where
−1/ 2
p0
( )
1 − α 2 + (2 ξα )
2 2
R= (3.50)
k
2 ξα
θ = tan −1 (3.51)
1 − α2
The ratio of the response amplitude, R, to the static displacement, p0/k, caused by the static application
of force p0 is the dynamic amplification factor, D:
−1/ 2
R
( )
= 1 − α 2 + (2αξ)
2 2
D≡ (3.52)
p0 k
Figure 3.4 shows plots of the dynamic amplification factor as a function of ωp/ω for various levels of
damping.
3.2.2.3.3 Response at Resonance
The condition where the frequency of harmonic loading is equal to the undamped natural frequency of
an oscillator, i.e., α = 1, is called resonance. We readily observe from Figure 3.4 that the peak steady-
state response occurs near the resonance frequency for lightly damped systems and at slightly decreasing
frequency ratios with increasing damping. Based on Equations 3.43 and 3.44, the response ratio of an
undamped system grows to infinity when the frequency ratio α = 1. Equation 3.52 indicates that for a
damped system at resonance, the dynamic amplification factor is inversely proportional to the damping
ratio:
1
Dα =1 = (3.53)
2ξ
FIGURE 3.4 Dynamic amplification factor for harmonic force at varying damping levels.
© 2003 by CRC Press LLC
0068_C03_fm Page 11 Tuesday, July 30, 2002 8:32 AM
Dynamics of Structures 3-11
As indicated above, Dα = 1 of Equation 3.53 is not exactly the maximum value of the amplification
factor, but is close to it. The actual maximum value can be easily determined by using basic differential
calculus. The frequency ratio that maximizes D is found by setting the first differential of the expression
in Equation 3.52 with respect to α equal to zero, resulting in:
α peak = 1 − 2 ξ 2 (3.54)
and the corresponding peak response is:
1
Dmax = (3.55)
2 ξ 1 − ξ2
For typical levels of damping, the difference between Equation 3.55 and the simpler Equation 3.53 is
negligible.
3.2.3 Evaluation of Damping in SDOF Systems
Typically, mass and stiffness properties of structures can be determined adequately for engineering
purposes based on measurements and standard analysis procedures. In many respects, determination of
the damping in a structure is a more complicated phenomenon, and the typical assumed viscous damping
is often a crude representation of the energy dissipation mechanisms that are responsible for the decay
of dynamic response. Damping is inherent in the free vibration of any material, the level of damping
depending on the material — that is, damping is a material property. The elements of a building are
constructed of a multitude of materials and connected to each other in various ways. For small amplitude
oscillations with low level elastic strains prevailing, the material damping is an essential component of
the overall building damping. With increasing oscillation amplitude, phenomena such as small inelastic
(hysteretic) deformations in the connections and concrete cracking start occurring. This introduces
additional damping, while the overall building response may still be linear. Eventually, when amplitudes
are large enough, significant material nonlinear, inelastic response occurs within the main structural
elements, with associated energy dissipation resulting in additional damping. Thus, the level of damping
increases with increasing response amplitude. Table 3.1 shows typically recommended damping values
for different types of construction.
The significance of the approximations inherent in damping modeling depends on the type of problem
at hand. In general, the level of damping in very short duration dynamic phenomena, e.g., blast and
impact problems, has small influence on the response. On the other hand, as illustrated by the discussion
above of the steady-state response to harmonic loading, damping may be very essential in “controlling”
response at frequencies close to resonance.
TABLE 3.1 Typical Recommended Modal Damping Ratiosa
Structure Type Stress Level 1b Stress Level 2b
Welded and friction-bolted steel structures 0.02 0.04
Bearing-bolted steel structures 0.04 0.07
Prestressed concrete structures 0.02 0.05
Reinforced concrete structures 0.04 0.07
a Fraction of critical damping.
b At stress level 1, member forces are generally less than about one half ultimate strength for
concrete and less than about one half yield capacity for steel. At stress level 2, a majority of the
primary load-resisting member forces are more than about half ultimate strength for concrete
and more than half yield capacity for steel. Damping values higher than stress level 2 values are
generally appropriate for structures responding well into their nonlinear range.
© 2003 by CRC Press LLC
0068_C03_fm Page 12 Tuesday, August 13, 2002 7:48 AM
3-12 Earthquake Engineering Handbook
Where proper estimation of damping is important, experimental methods may be useful in determin-
ing the damping ratio. Three simple methods to estimate damping based on measurements are introduced
in the following.
3.2.3.1 Free-Vibration Amplitude Decay
Consider the damped SDOF response expressed by Equation 3.35:
u(t ) = e −ξωt (A sin ω Dt + B cos ω Dt ) (3.35)
It is evident that rate of decay of the oscillatory response reflects the level of damping, suggesting that if
the decay rate can be measured, the level of damping can be determined. Recognizing that for low to
moderate damping levels, ωD ≈ ω, and consequently TD ≈ T, the ratio from one peak value to the next,
un/un+1 (or any two response values one period apart), are related as:
2π
ξ T
un / un+1 = e ξωT = e T = e 2 πξ (3.56)
from which the damping ratio can be solved as:
ln(un / un+1)
ξ= (3.57)
2π
and if the peaks are measured m cycles apart, i.e., un and un+m, an estimate of the damping ratio can be
computed from:
ln(un / un+m )
ξ= (3.58)
2mπ
The vibrations can be initiated by any convenient method, and only the relative displacement amplitudes
need be measured.
3.2.3.2 Amplification at Resonance
Measurement of amplification at resonance is based on determination of steady-state harmonic response
amplification at (essentially) resonance and requires application of harmonic excitations to the structure
at selected frequencies.
The method is based on the relationship expressed by Equation 3.53, i.e.,
1
Dα =1 = (3.53)
2ξ
From this, the damping ratio can be solved as:
1
ξ= (3.59)
2Dα =1
As was pointed out in Section 3.2.2.3.3, Dα = 1 is not exactly the maximum amplification factor, which
is easier to determine by measurement, since the maximum amplification factor is related to the damping
factor as:
1
Dmax = (3.60)
2ξ 1 − ξ 2
© 2003 by CRC Press LLC
0068_C03_fm Page 13 Tuesday, July 30, 2002 8:32 AM
Dynamics of Structures 3-13
FIGURE 3.5 Frequency-response curve for a moderately damped system.
at a frequency defined by Equation 3.54, i.e.,
ω p = ω 1 − 2ξ 2
For low and moderate damping levels, the square root expression in Equation 3.60 is essentially unity,
and the damping ratio can be expressed as:
1
ξ= (3.61)
2Dmax
The method requires that the frequency-response curve, i.e., the plot of D = D(ωp), for the structure
be constructed by applying a harmonic load at closely spaced frequencies extending up to the resonance
frequency. A typical frequency-response curve for a moderately damped structure is shown in Figure 3.5.
3.2.3.3 Half-Power (Bandwidth) Method
Examination of Equation 3.52 and Figure 3.5 readily reveals that damping affects not only the height of
the peak of the D vs. α curve, but also the width of the peak. The half-power bandwidth method of
estimating damping value is based on a particular relationship between the width of the peak of the D
vs. α curve. Specifically, by using the relationship of Equation 3.52, it can be shown that the difference
between the two frequencies on either side of the peak of the curve, α1 and α2, at which the response
amplitude is reduced to 1 2 times the peak value, is related to the damping ratio as:
ξ≅ 1
2 (α 2 − α1 ) (3.62)
© 2003 by CRC Press LLC
0068_C03_fm Page 14 Tuesday, August 13, 2002 7:49 AM
3-14 Earthquake Engineering Handbook
To illustrate the use of this method of estimating the damping ratio, a horizontal line is shown across
( )
the curve at 1 2 times the resonant-response value. According to Equation 3.62, the difference between
the frequencies at which this line intersects the response curve is equal to twice the damping ratio.
3.2.4 Response to Impulsive Loads
Impulsive or shock loads, consisting of a single short duration pulse, are of great importance in the
design of certain structures. Unlike for longer duration loading, damping usually has little influence on
the response to impulsive load as the maximum response is reached in a very short time. In the following,
response to impulsive loading is illustrated by four example cases: (1) sine wave impulse, (2) rectangular
impulse, (3) decaying triangular impulse, and (4) increasing triangular impulse. In each case, the solution
is divided into two phases: (1) the interval during which the load acts and (2) the following free vibration.
3.2.4.1 Sine-Wave Impulse
During phase I, for 0 ≤ t ≤ t1, the structure is subjected to harmonic loading, starting from rest (Figure 3.6),
and the undamped response, including the transient as well as the steady-state term, is given by Equation 3.43:
u (t ) =
p0 1
k 1 − α2
(
sin ω pt − α sin ωt ) (3.63)
During phase II, for t = t – t1 ≥ 0, the free-vibration motion depends on the displacement u(t1) and
velocity u· (t1) at the end of phase I, and may be expressed as follows (see Equation 3.23):
u˙ (t1 )
u (t ) = sin ωt + u (t1 ) cos ωt (3.64)
ω
umax can be found using the standard approach of differential calculus, i.e., as the value of u at the
point where the first derivative of u(t), i.e., velocity u· (t) is equal to zero.
The computations reveal that if the ratio of the loading and system natural frequency, α = ωp/ω, is
less than 1, umax will occur during phase I, i.e., while the impulsive load is acting. If α >1, umax will occur
during free vibration in phase II with the amplification factor, D, given by:
umax πt
D≡ = 2 sin 1
p0 k T
3.2.4.2 Rectangular Impulse
In the case of the rectangular impulse shown in Figure 3.7, response is again divided into the loading
phase and the subsequent free-vibration phase.
In phase I, the particular solution for a step loading, with 0 ≤ t ≤ t1, is simply:
p0
up = (3.65)
k
The general solution with the integration constants set to satisfy the at-rest initial conditions is easily
found to be:
p0
u (t ) =
k
(1 − cos ωt ) (3.66)
In phase II, the free vibration, with t = t – t1 ≥ 0, is again given by Equation 3.64:
u˙ (t1 )
u (t ) = sin ωt + u (t1 ) cos ωt (3.67)
ω
© 2003 by CRC Press LLC
0068_C03_fm Page 15 Tuesday, July 30, 2002 8:32 AM
Dynamics of Structures 3-15
FIGURE 3.6 Half sine-wave impulse.
FIGURE 3.7 Rectangular impulse.
The maximum response umax can again be found using the approach outlined above for the sine-wave
impulse case, and the amplification factor is as follows:
For
t1 1
≤
T 2
(3.68)
u πt
D ≡ max = 2 sin 1
p0 k T
© 2003 by CRC Press LLC
0068_C03_fm Page 16 Tuesday, July 30, 2002 8:32 AM
3-16 Earthquake Engineering Handbook
and for
t1 1
>
T 2 (3.69)
D=2
3.2.4.3 Decaying Triangular Impulse
Response to the decaying triangular impulse shown in Figure 3.8 is solved again in two steps using the
same approach for the rectangular impulse above.
For phase I, the decreasing triangular loading is p0(1 − t/t1), and the particular solution to this loading is:
p0 t
u p (t ) = 1− (3.70)
k t1
With zero initial conditions, the general solution is:
p0 sin ωt t
u (t ) = − cos ωt − + 1 (3.71)
k ωt1 t1
For phase II, Equation 3.71 and its first derivative at the end of phase I (t = t1) gives:
p0 sin ωt1
u (t1 ) = − cos ωt1 (3.72)
k ωt1
p0ω cos ωt1 1
u˙ (t1 ) = + sin ωt1 − (3.73)
k ωt1 ωt1
which can be substituted into Equation 3.67 to obtain the free-vibration response in phase II.
FIGURE 3.8 Decaying triangular impulse.
© 2003 by CRC Press LLC
0068_C03_fm Page 17 Tuesday, August 13, 2002 7:49 AM
Dynamics of Structures 3-17
The maximum response is found again from the zero-velocity condition. For very short duration
loading (t1/T < 0.4), the maximum response occurs during the free vibrations of phase II; otherwise it
occurs during the loading interval (phase I).
For phase I, during the application of the loading, for 0 ≤ t ≤ t1, with zero initial conditions, the general
solution is:
p0 t sinωt
u (t ) = − (3.74)
k t1 ωt1
During application of loading in phase I, for t = t – t1 ≥ 0, is again given by Equation 3.64, which
after determining u(t1) and u· (t1) at the end of phase I and substitution becomes:
p0 1 sin ωt1
u (t ) = (1 − cos ωt1 ) sin ωt + 1 − cos ωt (3.75)
k ωt1 ωt1
Figure 3.10 shows the dynamic amplification factor D as a function of t1/T for the four idealized
impulsive load shapes.
3.2.5 Approximate Analysis of Impulsive-Load Response
For a short duration impulsive loading, with duration significantly less than the natural period, i.e.,
t1 << T, an approximate expression for the response may be derived based on the equation of motion,
Equation 3.5, and the free-vibration response, Equation 3.67. Rearranging the terms of the equation of
motion and integrating from time zero to t1, and noting that:
t1
∫ 0
˙˙ = m∆u˙
mudt (3.76)
the following results:
∫ [ p (t ) − cu˙ (t ) − ku (t )]dt
t1
m ∆u˙ = (3.77)
0
where ∆u̇ represents the change of velocity from time zero to t1.
The velocity u˙ (t1) and displacement u(t1) developed over the period from time zero to t1 are very
small, the damping and elastic energy terms in Equation 3.77 can be ignored1 and Equation 3.77 rewritten
as:
t1
∫
1
m ∆u˙ = p (t ) dt (3.78)
m 0
The response after the termination of the loading is a free vibration expressed by Equation 3.67:
u˙ (t1 )
u (t ) = sin ωt + u (t1 ) cos ωt (3.79)
ω
1Note that as the left-hand side and the integrated impulse term are of the order of t1, while the integrated term
associated with damping is of the order of t12 and the elastic energy term of the order of t13, the latter two terms
become negligible when t1 approaches zero.
© 2003 by CRC Press LLC
0068_C03_fm Page 18 Tuesday, July 30, 2002 8:32 AM
3-18 Earthquake Engineering Handbook
FIGURE 3.9 Triangular impulse.
FIGURE 3.10 Dynamic amplification factor for four types of impulse loads as a function of t1 /T.
–
where t = t – t1.
· and t ≅ –t, the following approximate relationship
· ) = ∆u,
As u(t1) is negligibly small and velocity u(t1
may be used:
1 t1
u (t ) ≅
mω ∫
0
p (t ) dt sin ωt
(3.80)
© 2003 by CRC Press LLC
0068_C03_fm Page 19 Tuesday, July 30, 2002 8:32 AM
Dynamics of Structures 3-19
FIGURE 3.11 Arbitrary periodic loading.
3.2.6 Duhamel Integral
In the following, an expression for the response to an arbitrary dynamic loading is developed based on
Equation 3.80. The concept is to first derive, based on Equation 3.80, the differential response due to a
differential impulse, acting over an infinitesimal time interval and then, based on an assumption of
linearity, obtain the total response as the summation (integral) of the differential responses. For the
differential time interval dτ, the response is (for t > τ):
p (τ) dτ
du (t ) = sin ω (t − τ) (3.81)
mω
du(t) represents the differential response contribution of the impulse p(τ)dτ to the total response, which
is obtained by integrating Equation 3.81 as:
∫ p (τ) sin ω (t − τ) dτ
1
u (t ) = (3.82)
mω 0
Equation 3.82, known as the Duhamel integral, can be used to obtain the response of an undamped2
SDOF system to any dynamic loading p(t).
3.2.7 Response to Periodic Loading
The following two points are key to the powerful concise representation of SDOF system response to
periodic loading, and the extension to response analysis in the frequency domain:
1. The expression of the periodic loading as a Fourier series.
2. Based on linearity of the equation of motion, the superposition principle can be utilized to
construct the total response as the sum of the responses for each of the terms of the Fourier series.
The Fourier series expression of the periodic function p(t), such as shown in Figure 3.11, is:
∞ ∞
2πn
p (t ) = a0 + ∑
n=1
an cos
Tp
t+ ∑ b sin 2Tπn
n=1
n
p
(3.84)
2 For a damped system, the derivation is identical except that the free-vibration response initiated by the differential
load impulse decays exponentially. The Duhamel integral for a damped SDOF system is:
t
∫ p ( τ) e
1
u (t ) = − ξω(t − τ )
sin ω D (t − τ) dτ (3.83)
mω D 0
© 2003 by CRC Press LLC
0068_C03_fm Page 20 Tuesday, July 30, 2002 8:32 AM
3-20 Earthquake Engineering Handbook
where Tp is the period of the load function and:
Tp
∫
1
a0 = p (t ) dt (3.85)
Tp 0
Tp
2πn
∫
2
an = p (t ) cos t (3.86)
Tp 0 Tp
Tp
2πn
∫
2
bn = p (t ) sin t (3.87)
Tp 0 Tp
The response to the loading of Equation 3.84 is the sum of the responses for each of the terms. The
SDOF response to the type of harmonic (and the constant) terms of Equation 3.84 has been discussed
in the previous sections.
The steady-state response to the constant load component (which is equal to the average load) is the
static deflection, i.e.,
a0
u0 = (3.88)
k
The steady-state response of an undamped SDOF structure for each term of the series is written, by
analogy with Equation 3.40, as follows:
Sine terms:
bn 1
un (t ) = sin nω pt (3.89)
k 1 − αn2
where
nω p nω p
αn = = (3.90)
ω ω
Cosine terms:
an 1
un (t ) = cos nω pt (3.91)
k 1 − αn2
The total response of the undamped system is then expressed as the sum of all the individual responses
above:
1
∞
u (t ) = a0 +
k
∑ 1 −1α (a cos nω t + b sin nω t )
n=1 n
2 n p n p (3.92)
The response of a damped SDOF system subject to the periodic loading of Equation 3.84 is obtained
by using the damped-harmonic-response expressions of the form of Equation 3.48 in lieu of the
undamped-response expressions, Equations 3.89 and 3.91 above.
As a precursor for response analysis in the frequency domain (in the next section), Equations 3.84
through 3.87 are written in exponential form by utilizing Euler’s equation:
e ix = cos x + i sin x (3.93)
© 2003 by CRC Press LLC
0068_C03_fm Page 21 Tuesday, July 30, 2002 8:32 AM
Dynamics of Structures 3-21
and the following two corollary equations:
(
sin x = − 1 2 i e − ix − e − ix ) (3.94)
cos x = 1
2 (e − ix
+ e − ix ) (3.95)
where i is the imaginary unit ( i = – 1 ) . The exponential expression of p(t) is:
p (t ) = ∑c
n=−∞
n exp inω pt ( ) (3.96)
where
( )
Tp
∫
1
cn = p (t ) exp −inω pt dt (3.97)
Tp 0
Note that while cn is complex, in the series of Equation 3.96 all the terms with n ≠ 0 can be arranged
in complex conjugate pairs such that the imaginary parts cancel and the sum is real.
To examine the response in a case where the loading is expressed in the exponential form of Equation
3.96, first consider the response to a single complex term (n = 1) of Equation 3.96:
mu˙˙ (t ) + cu˙ (t ) + ku (t ) = exp iω pt ( ) (3.98)
The steady-state solution can be written in the form:
( ) ( )
u (t ) = H ω p exp iω pt (3.99)
where H(ωp) is found by substituting to Equation 3.98 as:
( )
H ωp = 2
1
−ω p m + iω pc + k
(3.100)
Denoting the frequency ratio by α and the damping ratio by ξ, this becomes:
( ) k ( −α
H ωp = 2
1
+ 2iαξ + 1 )
(3.101)
and for any arbitrary frequency nωp:
( ) k ( −n α
H nω p = 2 2
1
+ 2inαξ + 1 )
(3.102)
By superposition, the total steady-state response is written as:
u (t ) = ∑ H (nω )c exp (inω t )
n=−∞
p n p (3.103)
Note that H(nωp) and H(−nωp) are complex conjugates, as are, consequently, each (+n) and (−n) term
of the summation, and hence the sum is real.
© 2003 by CRC Press LLC
0068_C03_fm Page 22 Tuesday, July 30, 2002 8:32 AM
3-22 Earthquake Engineering Handbook
3.2.7.1 Response Analysis through the Frequency Domain
The concepts of the periodic loading and response outlined above can be further extended by generalizing
the Fourier series to Fourier integrals that are not limited to periodic functions.3
When the loading period is extended to infinity the frequency increment becomes an infinitesimal
dωp and the discrete frequencies become a continuous function. Thus in the limit, the Fourier series
expression for p(t), Equation 3.96, becomes the following Fourier integral:
∞
p (t ) =
1
2π ∫ ω p =− ∞
( ) ( )
c ω p exp iω pt dω p (3.104)
where the harmonic-amplitude function, c(ωp), is given by:
∞
( ) ∫
c ωp =
t =−∞
( )
p (t ) exp −iω pt dt (3.105)
Equations 3.104 and 3.105 are known as a Fourier transform pair and Equation 3.104 can be considered
as an extension of the finite sum of Equation 3.96 to an infinite integral that represents the loading as
an infinite sum of harmonic components. Analogous to Equation 3.103, the response u(t) can be written
(omitting some details) as:
∞
u (t ) =
1
2π ∫ ω p =− ∞
( )( ) ( )
H ω p c ω p exp iω pt dω p (3.106)
Equation 3.106 can be considered as the basic equation for the analysis of response through the frequency
domain.
3.2.7.1.1 Numerical Analysis in the Frequency Domain
For practical problems, the integrals of Equations 3.105 and 3.106 are evaluated numerically. The key
elements in this process are the concept of discrete Fourier transform (DFT) and the fast Fourier
transform (FFT) numerical technique used for evaluating the DFTs.
The DFT converts the integrals of Equations 3.105 and 3.106 back to finite series and thereby invokes
the periodicity assumption. However, the period can be taken sufficiently long, and the number of terms
in the series sufficiently high, as to not pose an unwanted limitation on the accuracy of the solution of
the practical problem.
The selected load period, Tp , defines the lowest frequency that can be captured in the analysis, i.e.,
2π
ω p = ∆ω p = (3.107)
Tp
The load period is divided into N equal time increments ∆t = Tp/N, and the load is defined for the
discrete times tm = m∆t and frequencies ωpn = n∆ωp. The exponential term in Equation 3.104 can be
written:
( )
(
exp iω pnt m = exp in∆ω pm∆t = exp 2πi
nm
N
) (3.108)
3 For the Fourier integral to exist, the only condition for the loading function is that the following integral must
be finite: ∞
∫−∞
p (t ) dt
© 2003 by CRC Press LLC
0068_C03_fm Page 23 Tuesday, July 30, 2002 8:32 AM
Dynamics of Structures 3-23
and Equation 3.104 is discretized as:
N −1
∆ω p
p (t m ) =
2π ∑ c (ω ) exp 2πi nm
n=0
pn
N
(3.109)
where the highest frequency to be included is set at (N − 1) ∆ωp .
The discrete expression for the amplitude function c(ωpn) is obtained as:
N −1
( )
c ω pn = ∆t ∑ p (t m ) exp −2πi nm
N
(3.110)
m=0
Equations 3.109 and 3.110 are the DFT pair corresponding to the continuous integral transforms of
Equations 3.104 and 3.105.
3.2.7.1.2 Fast Fourier Transform Analysis
In the current practice of frequency domain analysis, the sums in the DFT equations are computed
utilizing the powerful FFT technique. The details of this method are beyond the scope of this discussion,
and the reader is referred to the many texts on this topic [e.g., Newland, 1975; Clough and Penzien, 1975].
3.3 Multidegree-of-Freedom Systems
A structure can be modeled and its response analyzed using a SDOF model if the mass is essentially
concentrated at a single point that can move, translate, or rotate only in one direction, or if the system
is constrained in such a way as to permit only a single mode of displacement. In general, the mass of a
larger building or structure is distributed throughout the structure and can move in many ways. A realistic
description of the dynamic response of such systems generally requires the use of a number of independent
displacement coordinates, and modeling of the system as a multidegree-of-freedom (MDOF) system.
Dynamic analysis of such MDOF systems is discussed in the following sections.
3.3.1 Equations of Motion
The MDOF analysis procedure is illustrated by examining the dynamic response of the idealized two-
story building shown in Figure 3.12. The mass of the structure is assumed to be concentrated at the floor
levels, which are further assumed to be rigid and displace in one translational direction only. Thus, the
dynamic behavior of this structure is completely defined by the two-story displacements u1(t) and u2(t).
The equation of motion of any story can be derived from the expression of dynamic equilibrium of
all of the forces acting on the story mass, including the inertia, damping, and elastic forces that result
from the motion, and the externally applied force. The equations of equilibrium for the two stories can
be written as follows (using notation analogous to the SDOF case):
FI1 + FD1 + FS1 = P1 (t ) (3.111)
FI2 + FD2 + FS2 = P2 (t ) (3.112)
or equivalently in vector form:
FI + FD + FS = P (t ) (3.113)
© 2003 by CRC Press LLC
0068_C03_fm Page 24 Tuesday, July 30, 2002 8:32 AM
3-24 Earthquake Engineering Handbook
FIGURE 3.12 Two-degree-of-freedom system.
The inertia forces are given simply as the product of the story mass and the story acceleration, which
may be represented in matrix form as:
FI M1 0 u˙˙1
FI = 1 = (3.114)
FI2 0 M 2 u˙˙2
or simply:
FI = Mu˙˙ (3.115)
in which FI is the inertia force vector, ü is the acceleration vector, and M is the mass matrix.
It is important to note in Equation 3.114 that the inertia force corresponding to any degree of freedom
depends only on the acceleration in that degree of freedom. Such mass description is referred to as
lumped mass and the mass matrix is diagonal. In general, the mass matrix for a MDOF system is not
necessarily diagonal. For example, if the mass matrix is developed using the consistent mass matrix finite
element formulation, the mass matrix will not be diagonal and inertia coupling will be introduced
between the displacement coordinates. In some cases, the lack of mass coupling is desirable, and the
lumped mass representation is used in many practical analyses.
The elastic forces in Equations 3.111 and 3.112 are expressed as:
FS = Ku (3.116)
where Fs is the elastic force vector, u is the displacement vector, and K is the stiffness matrix of the
structure. The stiffness matrix K is generally not diagonal. The off-diagonal terms indicate that elastic
forces for a given coordinate depend on displacements of the other coordinates; there is stiffness coupling
between the coordinates. In practical applications, the stiffness matrix is most commonly constructed
using computer programs based on the finite element method.
Conceptually, the damping forces in Equations 3.111 and 3.112 can be expressed as:
FD = Cu˙ (3.117)
In the practical methods developed for MDOF analysis, individual elements of the damping matrix are
not computed based on “local” damping properties in the vicinity of the associated degrees of freedom.
Instead, damping is usually expressed in terms of damping ratios as discussed in Sections 3.2.2.2.2 and 3.2.3.1.
© 2003 by CRC Press LLC
0068_C03_fm Page 25 Tuesday, August 13, 2002 7:50 AM
Dynamics of Structures 3-25
FIGURE 3.13 Two-degree-of-freedom system with base excitation.
Substituting Equations 3.115 through 3.117 to Equation 3.113, the equations of dynamic equilibrium
may be written in matrix form as:
Mu˙˙ + Cu˙ + Ku = P t () (3.118)
Equation 3.118 represents the equations of motion of an arbitrary structural system having any number
of degrees of freedom. The similarity of this matrix equation to the corresponding SDOF equation
(Equation 3.5) is noteworthy.
3.3.1.1 Equation of Motion for Support Excitation Loading
Figure 3.13 illustrates the case where the dynamic loading is due to support excitation. The horizontal
ground motion relative to the fixed reference axis is indicated by the displacement ug. Instead of Equation
3.115, the inertia force for this case is given by:
FI = Mu˙˙ t (3.119)
i.e., for each mass point, the inertia force is the product of the mass and the total, absolute acceleration,
which can be written as:
u˙˙ t = u˙˙ + u˙˙ g (3.120)
In the above example each mass point has only one translational degree of freedom and each of the
two elements of vector üg is simply üg(t), that is, the ground acceleration time history. In a more general
case each mass point has more than one degree of freedom, e.g., all three translations and three rotations.
In the general case the ground acceleration vector is written as:
)
u˙˙ g = I u˙˙g (3.121)
)
where I defines the direction of the support excitation and consists of ones for those degrees of freedom
in the direction of excitation, and zeros otherwise.
After moving the ground motion acceleration terms to the right-hand side, the equation of motion
for support excitation becomes:
)
Mu˙˙ + Cu˙ + Ku = −MI u˙˙g (t ) (3.122)
© 2003 by CRC Press LLC
0068_C03_fm Page 26 Tuesday, August 13, 2002 7:50 AM
3-26 Earthquake Engineering Handbook
On the left-hand side, the acceleration ˙u̇ , velocity u̇, and displacement u are relative to the fixed base.
)
Therefore, the term Mü does not represent the full inertial loading on the mass points [ M (u˙˙ + I u˙˙g )
does], while Cü and Ku do represent the full damping and elastic forces acting on the mass points.
It is worth noting that the solution of Equation 3.122 for the relative displacement vector is the) same
as the solution of Equation 3.118, in this case for total displacement vector, for P (t ) = Peff (t ) = − MI u˙˙g (t ).
This is illustrated in Figure 3.13. Note that the “effective” inertia force acts at every mass point.
3.3.2 Vibration Mode Shapes and Frequencies
As for an SDOF system, the first step in finding the solution of the MDOF system equation of motion
is to study undamped free vibrations, i.e., damping and applied loads of Equation 3.118 set to zero:
Mu˙˙ + Ku = 0 (3.123)
Postulating that a solution can be found as harmonic motion with all the degrees of freedom moving
in phase, the displacement vector is written as:
u = ϕ sinωt (3.124)
where ϕ represents the amplitude vector of the vibratory motion and ω is the circular frequency.
By differentiating Equation 3.124 twice with respect to time, the acceleration vector is:
u˙˙ = −ω 2ϕ sin ωt (3.125)
Substituting Equations 3.124 and 3.125 into Equation 3.123 and canceling the sin ωt term leads to:
−ω 2Mϕ + Kϕ = 0 (3.126)
or rearranging:
(K − ω M) ϕ = 0
2
(3.127)
Equation 3.127 is a form of an eigenvalue problem. An eigenvalue problem associated with square
matrices of dimension n typically has n solutions, each consisting of an eigenvalue ωi2 and the eigenvector
ϕi , referred to as a mode shape in structural dynamics.
Before proceeding to discuss the response of the MDOF system, the properties of the mass and stiffness
matrices are briefly explored in the following section.
3.3.2.1 On Properties of Mass and Stiffness Matrix
The mass and stiffness matrices of a MDOF system have characteristics that have a strong bearing on
the mathematical analysis of the dynamic response of these systems. Some of these characteristics are
identified in the following, but a detailed discussion of these aspects is beyond the scope of this summary
presentation.
1. Both stiffness and mass matrices for linear elastic systems are symmetric.
2. Mass matrices are positive definite and stiffness matrices are positive semidefinite, i.e.,
ϕT Mϕ > 0 for every ϕ ≠ 0 (3.128)
and
ϕT Kϕ ≥ 0 for every ϕ ≠ 0 (3.129)
© 2003 by CRC Press LLC
0068_C03_fm Page 27 Tuesday, August 13, 2002 7:50 AM
Dynamics of Structures 3-27
Another important property of the eigensolutions is the orthogonality of the eigenvectors with respect
to both the mass and stiffness matrices M and K. This orthogonality property is expressed mathematically
by the following two equations:
T
ϕ i Mϕ j = 0 (3.130)
and
T
ϕ i Kϕ j = 0 (3.131)
Furthermore, the n orthogonal eigenvectors are linearly independent, and consequently any and all
vectors of the n-space can be constructed as a linear combination of these eigenvectors, i.e., any displace-
ment vector u can be expressed as:
u (t ) = ∑ ϕ η (t ) = Φη(t )
i =1
i i (3.132)
where Φ is a matrix containing the vectors ϕi (i 1, … n) as its columns and η can be considered a
generalized coordinate vector.
3.3.3 Modal Equations of Motion
A solution of Equation 3.127:
(K − ω M) ϕ = 0 2
(3.133)
is termed a natural mode of vibration and is defined by an eigenvalue ωi, termed the natural angular
frequency, and the corresponding eigenvector ϕi, termed the natural mode shape. It is readily observed
from Equation 3.133 that any eigenvector multiplied by a constant is also an eigenvector, hence the
magnitude of the eigenvector is not unique. However, it is customary to normalize the model shape
vectors with respect to the mass matrix such that:
T
ϕ i Mϕ i = 1 (3.134)
When the eigenvectors are arranged to a square matrix, with the vectors as the columns of the matrix,
the following relationships are written based on Equation 3.134 and the orthogonality properties:
ΦT MΦ = I (3.135)
ΦT KΦ = Ω (3.136)
where Ω is a diagonal matrix with the ωi values as the diagonal entries.
Next we express the equations of motion of the multidegree system in terms of the modal coordinates.
By differentiating Equation 3.132, the velocity and acceleration vectors are written as:
u˙ = Φη˙ (t ) (3.137)
˙˙ (t )
u˙˙ = Φη (3.138)
© 2003 by CRC Press LLC
0068_C03_fm Page 28 Tuesday, July 30, 2002 8:32 AM
3-28 Earthquake Engineering Handbook
Substituting into Equation 3.118 results in:
˙˙ + CΦη˙ + KΦη = P (t )
MΦη (3.139)
Multiplying Equation 3.139 with ΦT from the left results in:
˙˙ + ΦT CΦη˙ + ΦT KΦη = ΦT P (t )
ΦT MΦη (3.140)
Based on the orthogonality conditions of Equations 3.130 and 3.131, the first and third terms of the
left-hand side are diagonal matrices. If we further assume that same type of orthogonality conditions
also applies to the damping matrix, i.e., that:
T
ϕ i Cϕ j = 0 (3.141)
the normal coordinate equation of motion may be written more conveniently by introducing the following
symbols for the generalized coordinate properties of each mode i:
T
˙˙ i + ϕ i Cϕ i η˙ i + ϕ i Kϕ i ηi = ϕ i P (t )
ϕ i Mϕ i η
T T T
(3.142)
˙˙ i + Ci* η˙ i + K i* ηi = Pi* (t )
M i* η (3.143)
T
Generalized mass: M i* = ϕ i Mϕ i (3.144)
T
Generalized damping: Ci* = ϕ i Cϕ i (3.145)
T
Generalized stiffness: K i* = ϕ i Kϕ i (3.146)
Generalized loading: Pi* (t ) = ϕ i P (t )
T
(3.147)
Thus, by expressing the equations of motion, Equation 3.118, in terms of the modal coordinates, the
system of n coupled equations have been decoupled to n independent equations of motion that can be
written as:
Pi* (t )
˙˙ i + 2ξi ω i η˙ i + ω i2 ηi =
η i = 1,..., n (3.148)
M i*
These n independent equations of motion are of exactly the same form as the SDOF equation of
motion discussed above. Each of the equations in Equation 3.148 can be solved for the modal coordinate
ηi(t) using methods discussed in Section 3.2.2. The modal coordinates can then be combined to obtain
the displacement vector u per Equation 3.132.
The method of solving the MDOF equation of motion by transforming the problem to the modal
coordinate system, solving the uncoupled equations, and finally superposing the modal contributions is
referred to as the modal superposition method.
3.3.3.1 Rayleigh Proportional Damping
An assumption was made above that the damping matrix C has similar orthogonality properties as the
mass and stiffness matrices. If the damping matrix is represented as Rayleigh proportional damping,
i.e., as a linear combination of the mass and stiffness matrices:
C = a0M + a1K (3.149)
© 2003 by CRC Press LLC
0068_C03_fm Page 29 Tuesday, July 30, 2002 8:32 AM
Dynamics of Structures 3-29
FIGURE 3.14 Rayleigh damping.
then the damping matrix does possess the same orthogonality properties as the mass and stiffness
matrices, i.e.,
T
ϕ i Cϕ j = 0 (3.150)
Using notations of Equations 3.144 through 3.146, damping of the ith mode is expressed as:
Ci* = a0 M i* + a1K i* = a0 M i* + a1ω i2 M i* (3.151)
and as for the SDOF system, the damping ratio for mode i is written as:
Ci*
ξi = (3.152)
2M i*ω i
Substituting Equation 3.151 in Equation 3.152, the damping ratio becomes:
a0 1 a1
ξi = + ω (3.153)
2 ωi 2 i
Equation 3.153 indicates that the contribution from the mass related damping term is inversely
proportional to frequency, while the contribution from the stiffness related term is proportional to
frequency. Figure 3.14 shows the Rayleigh damping variation with natural frequency.
The coefficients a0 and a1 can be determined from specified damping ratios at two independent modes
k and l. Expressing Equation 3.153 for these two modes will lead to the following equations:
a0 1 a1
ξk = + ω (3.154)
2 ωk 2 k
a0 1 a1
ξl = + ω (3.155)
2 ωl 2 l
a0 and a1 can be solved as:
2ω kω l
a0 = ξ (3.156)
ωk + ωl
© 2003 by CRC Press LLC
0068_C03_fm Page 30 Tuesday, July 30, 2002 8:32 AM
3-30 Earthquake Engineering Handbook
2
a1 = ξ (3.157)
ωk + ωl
Note that at frequencies between ωk and ωl, damping is less than ξ. In practical problems, the
parameters ξ, ωk, and ωl should be set such that all the modes with significant contribution to the response
are assigned reasonable damping ratio values. Especially when used in nonlinear analysis for systems
where motions resembling rigid-body motion may occur, mass proportional damping is to be used with
caution, as unreasonably high damping may result.
3.3.4 Earthquake Response Analysis
In the case where the loading is earthquake ground motion, the right-hand side of the equation is written
as in Equation 3.122:
)
Peff (t ) = −MI u˙˙g (t ) (3.158)
)
where I defines the direction of the support excitation and consists of ones for those degrees of freedom
in the direction of excitation, and zeros otherwise.
Substituting Equation 3.158 for P(t) in Equation 3.140, the generalized effective earthquake load vector
is written as:
)
Peff* (t ) = − ΦMI u˙˙g (t ) (3.159)
which for mode i gives:
)
Peff* , i (t ) = −ϕTi MI u˙˙g (t ) (3.160)
By defining
) a participation factor for mode i for earthquake excitation in the direction defined by the
vector I as:
)
βi = ϕTi MI
the equation of motion for mode i of a multidegree system becomes:
˙˙ i + 2ξi ω i η˙ i + ω i2 ηi = − βi* u˙˙g (t )
η
Mi
The response of the ith mode can be expressed in terms of the Duhamel integral:
βi 1 t
ηi (t ) =
∫ u˙˙ (τ)e sin ω i (t − τ) dτ
− ξ i ω i (t − τ )
(3.161)
M i* ω i 0
g
By denoting the integral as Ui(t):
∫ u˙˙ (τ)e
1
U i (t ) = − ξ i ω i (t − τ )
sin ω i (t − τ) dτ (3.162)
ωi 0
g
The ith modal coordinate response can be written as:
βi
ηi (t ) = U (t ) (3.163)
M i* i
© 2003 by CRC Press LLC
0068_C03_fm Page 31 Tuesday, July 30, 2002 8:32 AM
Dynamics of Structures 3-31
The complete displacement of the structure at time t is then obtained by superposing the contribution
of all modes evaluated at this time by Equation 3.132 as:
u (t ) = ∑ ϕ η (t ) = Φη(t )
i =1
i i (3.132)
Typically, the modes with the lowest natural frequencies contribute most to the overall response, (1)
as the participation factors of these modes for earthquake excitation are high in comparison to those of
the higher modes, and (2) due to the presence of ωi in the denominator of the Duhamel integral (Equation
3.161). Therefore, an adequate approximation of the response is often obtained by including only a
number of the lowest modes in the summation of Equation 3.132. The method of MDOF earthquake
response analysis outlined above, culminating in superposition of modal responses, is referred to as the
modal superposition method. While the time integration of modal responses was formulated above in
terms of analytic functions, the time integration could be, and in practice usually is, performed using
numerical time integration methods that are discussed in Section 3.3.4.2.
3.3.4.1 Response Spectrum Analysis
The response spectrum method allows an approximate determination of the maximum response of an
MDOF system without performing a time history analysis, e.g., without employing the modal superpo-
sition method of the previous section or the direct time history analysis discussed in Section 3.3.4.2.
Response spectrum analysis consists of three steps:
1. Modal analysis, i.e., determination of the natural modes of vibration and the associated frequencies
as outlined in Section 3.3.3
2. Determination of the maximum response in each mode, “modal response,” included in the analysis;
this involves determination of maximum value of the modal coordinate, ηimax, over the duration
of the earthquake loading for each mode
3. Combination of the modal responses to obtain approximate maximum response
The maximum modal response for mode i, ηimax , can be expressed (see Equation 3.163) in terms of
the displacement response spectrum, Sd (ωi)(see Chapter 4):
βi
ηimax = S (ω ) (3.164)
M i* d i
The (relative) displacement vector uimax associated with the maximum peak response of mode i, i.e.,
ηimax, is:
βi
u imax = ϕ i ηimax = ϕ i S (ω ) (3.165)
M i* d i
Maximum values of response quantities such as relative displacement, element forces, and reaction
forces due to response in mode i can readily be determined based on the deformation defined by uimax.
In general, the maximum response uimax does not occur at the same point in time for all the modes
i = 1, …, n, and any combination of the modal maxima can only be an approximation of the actual
maximum response. A relatively simple and practical method, supported to an extent by probabilistic
considerations, for computing approximate total maximum response quantities is the square-root-of-
the-sum-of-the-squares (SRSS) procedure. If qimax is the maximum value of a response quantity, e.g., an
element shear force, due to mode i, an approximate total maximum of this quantity due to responses in
all modes included in the analysis, i = 1, …, N, is computed as:
© 2003 by CRC Press LLC
0068_C03_fm Page 32 Tuesday, July 30, 2002 8:32 AM
3-32 Earthquake Engineering Handbook
qmax = ∑q
i =1
2
imax (3.166)
Several other schemes of combining modal responses have been developed, for example, the complete
quadratic combination (CQC) rule (see Chopra [2001] for details), some of them particularly to predict
total response more accurately than the SRSS procedure in situations where the system has closely spaced
modes (i.e., some of the natural frequencies are very close to each other).
A key benefit of the response spectrum method is the ability to obtain a generally good approximation
of the earthquake response of a multidegree structure without having to perform a full-time history
analysis. The method is a standard feature in various structural analysis software packages. Response
spectra for design purposes are specified in the design codes and response spectra for major earthquakes
are customarily computed from accelerogram records and made available for public use.
3.3.4.2 Numerical Time Integration
The Duhamel integral is a useful conceptual tool and can be used to obtain a closed-form solution of
the equation of motion in cases where the integrand has an analytic integral function. In cases where an
analytic integral function cannot be developed, the integral can be evaluated numerically based on
approximation of the definite integral by a summation utilizing any of the classical summation rules,
e.g., the trapezoidal or Simpson’s rules.
In practice, however, step-by-step numerical integration schemes derived by expressing the relation-
ships between displacement and its time derivatives, velocity, and acceleration, utilizing approximate
discretized (with respect to time) expressions, and substituting these to the equation of motion, are most
commonly used. The Newmark family of time integration methods illustrates these numerical schemes.
The Newmark family contains as special cases many widely used methods. The method is based on the
following formulas:
Mu˙˙ t + ∆t + Cu˙ t + ∆t + Kut + ∆t = Pt + ∆t (3.167)
∆t 2
u t + ∆t = u t + u˙ t ∆t +
2
[
(1 − 2β)u˙˙ t + 2βu˙˙ t +∆t ] (3.168)
[
u˙ t + ∆t = u˙ t + ∆t (1 − γ ) u˙˙ t + γu˙˙ t + ∆t ] (3.169)
where u t , u˙ t , and u˙˙ t are approximations of u (t ), u˙ (t ), and u˙˙ (t ), respectively. Equations 3.167, 3.168, and
3.169 can be thought of as three equations for three unknowns, u t + ∆t , u˙ t + ∆t , and u˙˙ t + ∆t , assuming that
u t , u˙ t , and u˙˙ t are known from the previous step. By solving ˙u̇ t +∆t from Equation 3.168 in terms of u t +∆t ,
then substituting for ˙u̇ t +∆t in Equation 3.169, expressions are obtained for ˙u̇ t +∆t and u̇ t +∆t in terms of
u t +∆t as:
1
2 ( t + ∆t
− ut ) −
1 1
u˙˙ t + ∆t = u u˙ t − − 1 u˙˙ t (3.170)
β∆t β∆t 2β
u˙ t + ∆t = u˙ t + ∆t (1 − γ )u˙˙ t + γ∆tu˙˙ t + ∆t (3.171)
When these expressions are substituted in Equation 3.167, the resulting equation can be written as:
K *u t + ∆t = Pt*+ ∆t (3.172)
© 2003 by CRC Press LLC
0068_C03_fm Page 33 Tuesday, July 30, 2002 8:32 AM
Dynamics of Structures 3-33
where
1 γ
K* = M+ C +K (3.173)
β∆t 2 β∆t
and
1 1 1
Pt*+ ∆t = Pt + ∆t + M u + u˙ t + − 1 u˙˙ t +
β∆t β∆t 2β
2 t
(3.174)
γ γ ∆t γ
C ut + − 1 u˙ t + − 2 u˙˙
β∆t β 2 β t
The response can be solved step by step using the above equations starting from the initial conditions
u 0 , u˙ 0 , and u˙˙ 0 and over the period of time of interest. Convergence to the true solution requires that a
sufficiently short time step, ∆t, be used. The specific choice of values for the parameters β and γ affect
the accuracy and stability of the algorithm. A method is called unstable for a given time step size if the
solution, ut , grows out of bounds at some point even if the true solution, u(t), does not. It can be shown
that when:
γ ≥ 0.50 (3.175)
the method defined by Equations 3.170 through 3.174 is stable provided that the time step is less than
the threshold value that can be expressed in the form:
∆t ≤ αTmin (3.176)
where Tmin is the period of the highest natural mode of the system (and α is a coefficient that depends
on β and γ as well as on damping). The constraint imposed by Equation 3.176 may lead to a far shorter
time step than required to adequately resolve the low modes that dominate the response, and thereby
potentially cause an unreasonable computational burden.
A method that is stable only when a condition for the time step, of the type of Equation 3.176, is
satisfied is conditionally stable and a method that is stable regardless of time step size is unconditionally
stable.
If, in addition to the condition of Equation 3.175, coefficient β satisfies the condition:
β ≥ 0.25 ( γ + 0.5)
2
(3.177)
the method is unconditionally stable.
As in most seismic analyses of building structures, the low modes dominate the response, high modes
contributing negligibly to element forces, the number of modes necessary to be included in the analysis
to achieve reasonable accuracy is typically much less than the total number of degrees of freedom (i.e.,
total number of equations). Therefore, it is highly desirable not to be subject to the time step restriction
of Equation 3.176, which typically would force a much shorter time step than necessary to accurately
integrate the dominant low modes.
Table 3.2 provides the β and γ values, and the stability conditions for three widely used methods of
the Newmark family. In this table, the average acceleration and linear acceleration methods are indicated
as implicit. The term implicit refers to the fact that the equation of motion, Equation 3.167 (and
consequently Equation 3.172), is written at time t + ∆t and as the matrix K* multiplying the unknown
vector ut + ∆t is nondiagonal (as it includes the generally nondiagonal K, as well as C, which is nondiagonal
© 2003 by CRC Press LLC
0068_C03_fm Page 34 Tuesday, July 30, 2002 8:32 AM
3-34 Earthquake Engineering Handbook
TABLE 3.2 Properties of Selected Numerical Time Integration Algorithms
of the Newmark Family
∆t
Method Type β γ TMIN
Average acceleration Implicit 1/4 1/2 ∞
Linear acceleration Implicit 1/6 1/2 0.5513
Central difference Explicit 0 1/2 0.3183
if coeffcient a1 of Rayleigh damping [Equation 3.149] is positive), obtaining ut + ∆t involves solution of
coupled equations.
In Table 3.1 the central difference method is indicated as explicit. This refers to the fact that (1) when
Equation 3.167 (and subsequently Equation 3.172) is written for time step t, and (2) with the indicated
values of β = 0 and γ =1/2, üt and u· t become, using Equations 3.170 and 3.171:
u t + ∆t − 2u t + u t − ∆t
˙u̇ t = (3.178)
∆t 2
u t + ∆t − u t − ∆t
u̇ t = (3.179)
2∆t
and (3) M (and C if present) is diagonal, the matrix K* multiplying the unknown vector ut + ∆t is diagonal
(the nondiagonal K only multiplying the known ut [see Equation 3.180 below]), and consequently the
equations are uncoupled, leading to fast solution for each time step:
1 1 2 1 1
2 M+ C u = Pt − K − 2 M u t − 2 M − C u (3.180)
∆t 2∆t t + ∆t ∆t ∆t 2∆t t − ∆t
When time integration is used for nonlinear problems with the stiffness matrix varying over time, the
reduction in the amount of computations, in comparison to implicit methods, is significant. Countering
the benefit of simple fast solution per time step is the requirement for short time step imposed by
conditional stability. Problems for which use of explicit methods are particularly beneficial, or in many
cases mandatory, are nonlinear problems that involve one or more of the following characteristics:
1. Large deformations
2. Large rotations
3. Contact/impact with or without sliding
These types of problems often require the use of very short time steps in any case to achieve reasonable
accuracy and, therefore, the condition for short time step imposed by the stability condition is not a
burden.
As is typical of numerical methods, the numerical time integration algorithms are approximate.
However, like any generally acceptable numerical algorithm, a properly implemented time integration
scheme is convergent, i.e., the computed solution approaches the exact value when time step size
approaches zero (i.e., ut → u(t) when ∆t → 0). For the time integration algorithms introduced above,
the errors in the computed response can be categorized as period elongation and amplitude decay.
Figure 3.15 illustrates these errors for a case where a free vibration response is integrated numerically.
Typically, the implicit methods elongate the period while the explicit central difference method reduces
the period relative to the exact value. Typically, all the methods except the Newmark constant average
acceleration method (i.e., β = 1/4 and γ = 1/2) cause amplitude decay that can be thought of as numerical
damping, which adds to any damping included explicitly in the model, e.g., through Rayleigh damping.
© 2003 by CRC Press LLC
0068_C03_fm Page 35 Tuesday, July 30, 2002 8:32 AM
Dynamics of Structures 3-35
FIGURE 3.15 Amplitude decay and period elongation.
By shortening the time step, these errors can be limited to any desired level. For the Newmark family of
implicit methods, it is generally recommended that time step be limited to:
∆t ≈ 0.05Tcut −off (3.181)
where Tcut-off is the period of the highest mode required to be resolved with a reasonable level of accuracy
in order to capture the response adequately. With the central difference method, any time step that
satisfies the stability condition typically results in adequate accuracy of the computed response for most
practical problems.
3.3.5 Nonlinear Analysis
Linear analysis implies that the properties of the system — stiffness, damping, and mass — are not
dependent on the response variables of displacement, velocity or acceleration, or time — that is, the
properties of the system are constant with time. Consequently, the coefficients (matrices for MDOF)
multiplying the unknown displacement, velocity, or acceleration (vectors for MDOF) are constant.
As the level of loading and response increase, at some point the assumption of system properties
remaining constant is no longer valid. For example, the stiffness properties may change as a result of
material strains growing large enough to cause yielding or other nonlinear behavior, changes in stiffness
due to change in geometry resulting from large deformation or rotation, or contact/impact to neighboring
structures as displacements increase.
The superposition principle, which is inherent both in the Duhamel integral and in the mode super-
position method of MDOF systems, is not valid for nonlinear systems. The existence of the orthogonal
natural modes of vibration of an MDOF system, which allow decoupling of the equations of motion in
the mode superposition method, is tied to the linearity assumption. Consequently, the only method
generally suitable for analysis of nonlinear response is a direct step-by-step time integration. (Direct refers
to the fact the numerical algorithm is applied “directly” to the “original” matrix equation of motion of
an MDOF system, not to a system converted to modal coordinates.) The concept in the step-by-step
integration is that the response is solved.
To enable the proper consideration of the changing properties during the solution of a nonlinear
problem, the solution is performed in small incremental steps adjusting the properties at the beginning
of each step based on the deformation and stress in the beginning of each step. The length of the step is
selected such that adequate accuracy in tracking the time-varying load, capturing the dynamic aspects of
the response, and capturing the changes in properties is achieved. (In static nonlinear analysis, the step-
by-step incremental procedure is also required to allow incorporation of the change in properties with
the increasing load, in this case without reference to time and without the damping and inertia effects.)
© 2003 by CRC Press LLC
0068_C03_fm Page 36 Tuesday, August 13, 2002 7:50 AM
3-36 Earthquake Engineering Handbook
FIGURE 3.16 Nonlinear internal force–displacement relationship and tangent stiffness.
In the dynamic analysis of building structures, the mass matrix is generally assumed to be constant.
In many nonlinear building time-history analyses, it is convenient and in most cases adequate to model
damping with the Rayleigh proportional damping, Equation 3.149:
C = αM + βK (3.149)
where the stiffness matrix K is the original elastic stiffness matrix. It is important to note that nonlinear
modeling may introduce damping mechanisms in addition to the damping effected through the C matrix.
For example, elements with material descriptions including plasticity, as well as nonlinear link, cable,
and contact elements may introduce hysteretic deformation behavior that results in energy dissipation.
Care has to be exercised not to overestimate damping by “double counting” the energy dissipation through
the combined effect of nonlinear element behavior and damping with the global damping matrix C.
To introduce the nonlinear effects due to material nonlinear behavior, geometric nonlinearity, and
contact/impact, we first denote the structure internal force vector by fint, which for a linear elastic system
can be written as:
f int = Ku (3.182)
Assume that the displacements increase to a point beyond which response is nonlinear. Beyond this
point, the change in the internal force vector, ∆f int, due to a small additional displacement increment,
∆u, can be written as:
∆f int = K T ∆u (3.183)
where KT is the tangent stiffness matrix. (The superscript T denotes tangent, not transpose, of the matrix
K.) The elements of the matrix are defined by:
∂fi int
kijT = (3.184)
∂u j
Figure 3.16 illustrates nonlinear internal force and tangent stiffness.
Denoting the value of f int at time t by f int
t , and the change in displacement vector u from time t to time
t + ∆t by ∆ut + ∆t, the value of f int at t + ∆t can be written as:
+ ∆t = ft
ftint + KtT ∆u t + ∆t
int
(3.185)
© 2003 by CRC Press LLC
0068_C03_fm Page 37 Monday, August 19, 2002 12:31 PM
Dynamics of Structures 3-37
where KTt is the tangent stiffness matrix at time t, and ∆ut + ∆t “updates” ut to ut + ∆t , i.e.,
u t + ∆t = u t + ∆u t + ∆t (3.186)
Substitution of the term ftint
+∆t
for the elastic nodal force vector Kut + ∆t in Equation 3.167 leads to:
Mu˙˙ t + ∆t + Cu˙ t + ∆t + ftint
+ ∆t = Pt + ∆t (3.187)
Direct time integration algorithms, such as those represented by the Newmark family, can be readily
adopted for use in nonlinear analysis. Using the Newmark Equations 3.170 and 3.171 for üt + ∆t and u· t + ∆t ,
respectively, and substituting expression 3.185 for ftint
+∆t
leads to:
˜ ∆u
t + ∆t = Pt + ∆t
*
K t (3.188)
where, when parameters β and γ are assigned values 1/4 and 1/2, respectively (i.e., the constant average
acceleration method is used):
4 2
K̃t = M + C + KtT (3.189)
∆t 2
∆t
4
Pt*+ ∆t = Pt + ∆t − ftint + M u˙ t + u˙˙ t + Cu˙ t (3.190)
∆t
Once ∆ut + ∆t is solved from Equation 3.188, ut + ∆t is computed from Equation 3.186. Because the
tangent stiffness was evaluated at ut (not at ut + ∆t) the solution is approximate. Often iterations are
required to achieve sufficient accuracy. One widely used iteration procedure is the modified Newton
iteration, which is formulated by replacing Equation 3.186 with:
u (t k+)∆t = u t(k+−∆1t) + ∆u t(k+)∆t (3.191)
and
u t(0+)∆t = u t (3.192)
where k is the iteration counter.
This results in slight modification of Equation 3.188, which is now written for the unknown ∆u(t k+)∆t :
˜ ∆u (k ) = P *
K (3.193)
t t + ∆t t + ∆t
The coefficient matrix K̃ t is unchanged, while the right-hand side Pt*+∆t is modified to:
4
( 4
)
Pt*+ ∆t = Pt + ∆t − ftint(k −1) − M 2 u (t k+−∆1t) − u t − u˙ t − u˙˙ t −
∆t ∆t
(3.194)
2
C
∆t
( )
u (t k+−∆1t) − u t − u˙ t
For each iteration, acceleration and velocity are computed from the following equations (Equations
3.170 and 3.171 with u (t +∆
k)
t
, Equation 3.191, substituted for ut + ∆t , and β and γ equal to 1/4 and 1/2,
respectively):
© 2003 by CRC Press LLC
0068_C03_fm Page 38 Tuesday, July 30, 2002 8:32 AM
3-38 Earthquake Engineering Handbook
u˙˙ (t k+)∆t =
4
∆t 2 ( ) 4
u (t k+−∆1t) + ∆u t(k+)∆t − u t − u˙ t − u˙˙ t
∆t
(3.195)
u˙ (t k+)∆t =
2
( )
u (k −1) + ∆u t(k+)∆t − u t − u˙ t
∆t t + ∆t
(3.196)
Defining Terms
Angular velocity — A measure of rotational speed, for which the typical unit is radians/second.
Characteristic equation — The polynomial equation resulting from substitution of an exponential trial
solution to a differential equation.
Complementary solution — Solution of the homogeneous differential equation; includes the coeffi-
cients of integration that are defined based on initial conditions.
Conditional stability — A numerical time integration method is conditionally stable if it is stable only
for a time step size shorter than some threshold value; otherwise it is unconditionally stable.
Convergence — A numerical time integration method is convergent if the computed solution
approaches the exact value when time step size approaches zero (i.e., ut → u(t) when ∆t → 0).
Critical damping — The lowest level of damping at which the free response will not involve oscillations
across the zero displacement condition.
Damping — Energy dissipation mechanism that leads to decay of the response; often modeled by linear
viscous dashpot.
Damping ratio — Ratio of damping to critical damping.
Diagonal — Property of a matrix, where only the diagonal terms (i.e., terms in which row and column
numbers are equal) are non-zero.
Direct method — A numerical time integration method that operates directly on the “original” MDOF
equations of motion, i.e., not on the “transformed” uncoupled modal equations of motion.
Discrete Fourier transform — A discretized approximation of the Fourier transform integral.
Duhamel integral — An analytic integral expression that yields the response of an SDOF system to an
arbitrary loading function.
Dynamic amplification factor — Ratio of the maximum displacement response amplitude to the static
displacement.
Eigenvalue problem — In MDOF dynamics context, a set of n simultaneous homogeneous linear equa-
tions for n unknowns that only has a solution for certain values (the eigenvalues) of a parameter.
The solution of an eigenproblem consists of the eigenvalue and the associated eigenvector.
Elastic spring — A spring that follows the same force-displacement curve for loading and unloading.
Explicit — In an explicit time integration method, only the diagonal mass matrix multiplies the
unknown displacement vector to be solved for the next time step; does not involve solution of
coupled equations.
Fast Fourier transform — A numerical technique for computation of the Fourier transform; utilizes
the discrete Fourier transform in the process.
Fourier series — A representation of a periodic function as a (generally infinite) series of sine and cosine
terms.
Fourier transform — A generalization of Fourier series to nonperiodic functions, the infinite series
becoming infinite integral expressions.
Free vibrations — Vibration of a system with no loading applied, after the system has been set in motion
by some means.
General solution — The complete solution of a differential equation, consisting of the complementary
solution and the particular solution.
Homogeneous equation — The version of a differential equation with the right-hand side, i.e., the
loading term, set to zero.
© 2003 by CRC Press LLC
0068_C03_fm Page 39 Tuesday, July 30, 2002 8:32 AM
Dynamics of Structures 3-39
Implicit — In an implicit time integration method, the (nondiagonal) stiffness matrix multiplies the
unknown (displacement or acceleration) vector to be solved for the next time step; involves
solution of coupled equations.
Impulsive load — A short duration (relative to natural period) loading consisting of a single “spike.”
Inertia — The tendency of mass to maintain its momentum (both linear and angular momentum).
Linear — In a linear system, multiplication of the input, e.g., applied force, by a constant results in the
response being multiplied by the same constant. L(·) is linear if L(u) = f ⇒ L(αu) = αf.
Linearly independent — Vectors ϕi are linearly independent if
n
∑ α ϕ = 0 implies that every α = 0.
i =1
i i i
Lumped mass — A discretized representation, in a diagonal mass matrix, of the generally continuous
distributed mass inertia (translational and/or rotational) of a MDOF system with no inertia
coupling between degrees of freedom.
Mode shape — Often referred to as a natural mode of vibration, is an eigenvector (see eigenvalue
problem) of the eigenvalue problem of structural dynamics.
Multiple degree of freedom (MDOF) — System with multiple mass points; description of motion
requiring use of multiple displacement variables.
Natural angular frequency — Synonym for natural angular velocity.
Natural angular velocity — The angular velocity obtained as a solution of the characteristic equation
of an undamped system.
Natural frequency — Number of cycles per second, obtained by dividing natural angular frequency by
2π.
Natural period — The inverse of natural frequency.
Nonlinear — A system is nonlinear if it is not linear.
Numerical damping — Associated with most numerical time integration methods and causes ampli-
tude decay in the computed free vibration response of an undamped system.
Orthogonal — Vectors ϕi and ϕj are orthogonal with respect to matrix M if ϕiT Mϕ ϕj = 0.
Particular solution — Solution of the differential equation with the loading term on the right-hand
side of the equation.
Periodic loading — A loading history function with a particular pattern repeating at constant intervals,
i.e., P(t + ∆) = P(t), where ∆ is the period.
Positive definite — Matrix M is positive definite if ϕT Mϕϕj > 0 for every ϕ ≠ 0.
Positive semidefinite — Matrix K is positive semidefinite if ϕT Kϕ ϕj ≥ 0 for every ϕ ≠ 0.
Rayleigh proportional damping — Rayleigh proportional damping is of the form C = a0 M + a1 K.
Resonance — The condition where the frequency of the harmonic loading is equal to the undamped
natural frequency of the system.
Response ratio — The momentary ratio of the total displacement to the static displacement.
Response spectrum — A representation of the maximum value of a response parameter, such as accel-
eration or displacement, over the duration of earthquake loading as a function of frequency ω
for a given earthquake and damping level. For an acceleration response spectral ordinate Sa (ω)
is the maximum acceleration experienced by the mass of the SDOF system that has a natural
frequency of ω during the earthquake loading.
Response spectrum method — An approximate method of earthquake response analysis based on
modal superposition and response spectrum concepts.
Simple harmonic motion — Undamped motion described by a sine or cosine function with oscillations
at the natural frequency.
Single-degree-of-freedom (SDOF) — System with a single mass point whose motion can be described
with a single displacement variable.
© 2003 by CRC Press LLC
0068_C03_fm Page 40 Tuesday, July 30, 2002 8:32 AM
3-40 Earthquake Engineering Handbook
Solution in the frequency domain — Refers to solution of the equation of motion by performing a
Fourier transform of the loading, finding the Fourier transform of the solution, and obtaining
the solution (i.e., the displacement function) through the inverse Fourier transform. In practice
the computations are implemented using the fast Fourier transform algorithm.
Stability — A numerical time integration method is unstable if at some time point the computed
response grows without bounds even if the exact solution does not; otherwise it is stable.
Steady-state response — The particular solution of a damped system to periodic loading.
Tangent stiffness — A “local” approximate linearized stiffness at a given deformation state during non-
linear response.
Transient response — The complementary solution for a damped system that decays exponentially and
is typically relevant only in the “beginning” of the response.
References
Bathe, K.-J. 1982. Finite Element Procedures in Engineering Analysis, Prentice-Hall, New York.
Biggs, J.M. 1964. Introduction to Structural Dynamics, McGraw-Hill, New York.
Chopra, A.N. 2001. Dynamics of Structures, 2nd ed., Prentice-Hall, New York.
Clough, R.W. and Penzien, J. 1975. Dynamics of Structures, McGraw-Hill, New York.
Harris, C.M. 1988. Shock and Vibration Handbook, McGraw-Hill, New York.
Hughes, T.J.R. 1987. The Finite Element Method, Linear Static and Dynamic Finite Element Analysis,
Prentice-Hall, New York.
Meirovitch, L. 1975. Elements of Vibration Analysis, McGraw-Hill, New York.
Newland, D.E. 1975. An Introduction to Random Vibrations and Spectral Analysis, Longman, New York.
Wiegel, R.L. 1970. Earthquake Engineering, Prentice-Hall, New York.
© 2003 by CRC Press LLC
You might also like
- Magbook General Science - Poonam SinghDocument273 pagesMagbook General Science - Poonam Singhmanish100% (2)
- Advancements in Solving Ballistic Equations Involving Quadratic DragDocument21 pagesAdvancements in Solving Ballistic Equations Involving Quadratic DragElliott WallNo ratings yet
- Equations of MotionDocument6 pagesEquations of MotionDharshan KofiNo ratings yet
- 3.2 Force Balance and Moment-Balance Methods: F DX DTDocument1 page3.2 Force Balance and Moment-Balance Methods: F DX DTMuhammad Junaid KhanNo ratings yet
- Chapter 3Document17 pagesChapter 3Usha GautamNo ratings yet
- CHAPTER 3-Stiffness MatrixDocument17 pagesCHAPTER 3-Stiffness MatrixMahesh BisuralNo ratings yet
- Vibration Theory Ch3Document22 pagesVibration Theory Ch3rmartinson8No ratings yet
- Dynamics 1Document12 pagesDynamics 1nicholasomodingNo ratings yet
- Chapter 3 Response of Structures To DynaDocument61 pagesChapter 3 Response of Structures To DynaSayyadh Rahamath BabaNo ratings yet
- Lecture 3 Particle Kinetics OKDocument48 pagesLecture 3 Particle Kinetics OKAeon ReignNo ratings yet
- The Direct Stiffness Method: Assembly and SolutionDocument14 pagesThe Direct Stiffness Method: Assembly and SolutionShubhankar BhowmickNo ratings yet
- Lecture 3 Particle Kinetics OKDocument48 pagesLecture 3 Particle Kinetics OKTất ThànhNo ratings yet
- Mohamed Wael 191383Document9 pagesMohamed Wael 191383amr01212086953No ratings yet
- Of Freedom. For Example A Simple Pendulum Consisting of An Inextensible String That IsDocument37 pagesOf Freedom. For Example A Simple Pendulum Consisting of An Inextensible String That IsLucia Antonius100% (1)
- Energy Dissipated in Viscous DampingDocument8 pagesEnergy Dissipated in Viscous Dampingfarhang_tNo ratings yet
- Node Nodal Degrees of Freedom: 1. The Definition of The Finite Element Method (FEM)Document32 pagesNode Nodal Degrees of Freedom: 1. The Definition of The Finite Element Method (FEM)KomarudinNo ratings yet
- CH03Document22 pagesCH03Stephen FortisNo ratings yet
- Spin Softening N Stress StiffeningDocument23 pagesSpin Softening N Stress StiffeningaruatscribdNo ratings yet
- Structural Dynamics and Earthquake EngineeringDocument76 pagesStructural Dynamics and Earthquake EngineeringGerman ToledoNo ratings yet
- PDF Dynamic Analysis of StructuresDocument43 pagesPDF Dynamic Analysis of StructuresChegue BureNo ratings yet
- Torsional Vibration RotorDocument59 pagesTorsional Vibration Rotordaongocha108100% (1)
- Compendium 3Document5 pagesCompendium 3m.jovanoskaNo ratings yet
- Mathematical Simulation of Damping Oscillation On Motorcycle SuspensionDocument10 pagesMathematical Simulation of Damping Oscillation On Motorcycle Suspensionاحمد محمدNo ratings yet
- Capitulo 4 - Elasticidad Bidimensional PDFDocument55 pagesCapitulo 4 - Elasticidad Bidimensional PDFCristian David BravoNo ratings yet
- SCIA5202Document67 pagesSCIA52022BA19CV059 Rakshita SarangmathNo ratings yet
- 03 CH 3 Numerical SolutionsDocument41 pages03 CH 3 Numerical SolutionslaithNo ratings yet
- 2000 MOUSSA - Evolution of Natural Frequencies in Tensegrity SystemsDocument17 pages2000 MOUSSA - Evolution of Natural Frequencies in Tensegrity SystemsDaniel MartinsNo ratings yet
- Motion and Dynamics: 3.1 Making Sense of Dynamic EquilibriumDocument6 pagesMotion and Dynamics: 3.1 Making Sense of Dynamic EquilibriumnasirfahimNo ratings yet
- Dynamic Analysis of StructuresDocument57 pagesDynamic Analysis of StructuresYollanda LorenzaNo ratings yet
- Chapter 3-Theory-of-Elasticity-PG-Course PDFDocument10 pagesChapter 3-Theory-of-Elasticity-PG-Course PDFephNo ratings yet
- Types of Response and VibrationsDocument40 pagesTypes of Response and VibrationsGaluh Ayu PNo ratings yet
- CHPT 3 - Development of Truss EquationsDocument69 pagesCHPT 3 - Development of Truss Equationsfatih reyhanNo ratings yet
- 3 Continuous-Time Structural SystemsDocument24 pages3 Continuous-Time Structural SystemsstefanNo ratings yet
- A Comparative Study Between Codes of Spectrum For A Single Degree of Freedom (SDOF) System in Two Different Hazardous RegionsDocument24 pagesA Comparative Study Between Codes of Spectrum For A Single Degree of Freedom (SDOF) System in Two Different Hazardous RegionsParvathy KrishnaNo ratings yet
- Energy and Work: All External Work Supplied To A Real Structural System Is Stored or Dissipated As EnergyDocument16 pagesEnergy and Work: All External Work Supplied To A Real Structural System Is Stored or Dissipated As Energycomenzi8131No ratings yet
- Ess Model Mechs YsDocument7 pagesEss Model Mechs YsJeyaram kumar0% (1)
- Vibration FinalDocument20 pagesVibration FinaljaysamNo ratings yet
- CE 181 Waves ch3Document16 pagesCE 181 Waves ch3Nick Jhonatan Moreno MorenoNo ratings yet
- UNIT - 4effect - of - Dampingchapter - 4 - DocDocument14 pagesUNIT - 4effect - of - Dampingchapter - 4 - DocDr. M.V.Krishna RaoNo ratings yet
- LW1 Test ExampleDocument4 pagesLW1 Test ExampleBalta AndreiNo ratings yet
- Paper36 ViscousVersusStructuralDampingDocument7 pagesPaper36 ViscousVersusStructuralDampingCindy WangNo ratings yet
- Types of Damping 1. Viscous DampingDocument6 pagesTypes of Damping 1. Viscous DampingZandro GagoteNo ratings yet
- Dinamika Struktur Dan RekgemDocument19 pagesDinamika Struktur Dan Rekgemsaktibadut012No ratings yet
- Mechanics of Machines Iii-Final Course MaterialsDocument39 pagesMechanics of Machines Iii-Final Course MaterialsKaren DavisNo ratings yet
- Principles of Mechanics: Chap. 5Document17 pagesPrinciples of Mechanics: Chap. 5Daniel RomeroNo ratings yet
- Module 2 Kinetics of A Particle-Force and AccelerationDocument72 pagesModule 2 Kinetics of A Particle-Force and AccelerationHuy VũNo ratings yet
- Mechatronics: Learning Resources Unit Wise Compiled by Dr. A. P. Sathiyagnanam Assistant ProfessorDocument111 pagesMechatronics: Learning Resources Unit Wise Compiled by Dr. A. P. Sathiyagnanam Assistant Professornilanjan_kar_2No ratings yet
- Passive Tuned Mass Damper For Seismic Protection: Septimiu-George Luca and Cristian PastiaDocument10 pagesPassive Tuned Mass Damper For Seismic Protection: Septimiu-George Luca and Cristian PastiaIngeniero Emmanuel RodriguezNo ratings yet
- Assignment StaticDocument24 pagesAssignment StaticSuhayl AzminNo ratings yet
- Calculo de Fuerzas en Los NodosDocument19 pagesCalculo de Fuerzas en Los NodosFredyNo ratings yet
- Equations of Motion of Basic Dynamic SystemDocument13 pagesEquations of Motion of Basic Dynamic SystemBabar AliNo ratings yet
- Theory of VibrationDocument30 pagesTheory of VibrationCharles OndiekiNo ratings yet
- Chapter 3 Waves in An Elastic Whole Space Equation of Motion of A SolidDocument16 pagesChapter 3 Waves in An Elastic Whole Space Equation of Motion of A SolidpaivensolidsnakeNo ratings yet
- Script DynamicsDocument13 pagesScript DynamicsUMARNo ratings yet
- Obtaining Stresses and Strains From Ods Data:) T (X&) T (X&Document7 pagesObtaining Stresses and Strains From Ods Data:) T (X&) T (X&ho-faNo ratings yet
- Finite Element AnalysisDocument9 pagesFinite Element Analysishas960No ratings yet
- Lecture Notes - Linear Elasticity TheoryDocument43 pagesLecture Notes - Linear Elasticity Theoryzcapg17No ratings yet
- 5 External Reliability: Robustness Analysis Final ReportDocument23 pages5 External Reliability: Robustness Analysis Final ReportMul YaniNo ratings yet
- Chapter 3. Introduction To Molecular Vibrations 3.1 OverviewDocument6 pagesChapter 3. Introduction To Molecular Vibrations 3.1 OverviewpranavNo ratings yet
- Full Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?From EverandFull Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?No ratings yet
- PHYSICAL SCIENCE MODULE 4-EditedDocument24 pagesPHYSICAL SCIENCE MODULE 4-Editedshay.dedoroyNo ratings yet
- Chapter 10 BookletDocument28 pagesChapter 10 BookletMIhaela CorcheNo ratings yet
- 3 MEC420 - Kinetics of Particles - Force - AccDocument39 pages3 MEC420 - Kinetics of Particles - Force - AccBella MNo ratings yet
- The Principle of EquivalenceDocument23 pagesThe Principle of EquivalenceAnonymous 8buGHsNo ratings yet
- MECH2210 Lecture NotesDocument39 pagesMECH2210 Lecture NotesKeith WellsNo ratings yet
- Forces and MotionDocument42 pagesForces and MotionJulius Memeg PanayoNo ratings yet
- The SUVAT Equations and Their Derivation - StudyWellDocument6 pagesThe SUVAT Equations and Their Derivation - StudyWellAl KotNo ratings yet
- SUVAT - PracticeDocument2 pagesSUVAT - Practicemike simsonNo ratings yet
- Computer-Aided Analysis of Mechanical SystemsDocument388 pagesComputer-Aided Analysis of Mechanical SystemsChristian Cruzado100% (2)
- Wbsu Math SyallabusDocument59 pagesWbsu Math SyallabusShreyaskar DasNo ratings yet
- ME-100 Engineering Mechanics Course Outline PDFDocument2 pagesME-100 Engineering Mechanics Course Outline PDFRameez HayatNo ratings yet
- Seta D 23 02149Document34 pagesSeta D 23 02149Paúl ZambranoNo ratings yet
- Motion ProblemsDocument3 pagesMotion ProblemsMarielle Catral100% (1)
- P21-M SC - PHYSICSDocument120 pagesP21-M SC - PHYSICSRADHAKRISHNANNo ratings yet
- Lagrangian MethodDocument50 pagesLagrangian MethodrajuNo ratings yet
- Dynamics and Relativity 1Document3 pagesDynamics and Relativity 1Teddy AmazonNo ratings yet
- Lab # 2Document6 pagesLab # 2Muhammad FarzanNo ratings yet
- Chapter 17: Planar Kinetics of A Rigid Body: Force and AccelerationDocument137 pagesChapter 17: Planar Kinetics of A Rigid Body: Force and AccelerationsritaranNo ratings yet
- 114 Robotics: Control, Sensing, Vision, and IntelligenceDocument12 pages114 Robotics: Control, Sensing, Vision, and IntelligenceMiguel Angel Tovar EstradaNo ratings yet
- 5 - Unsteady Flow in Rivers Pp. 122-157Document37 pages5 - Unsteady Flow in Rivers Pp. 122-157Anonymous 87xpkIJ6CFNo ratings yet
- Chapter 1 Introduction 2013 Flight Dynamics PrinciplesDocument11 pagesChapter 1 Introduction 2013 Flight Dynamics PrinciplesMinseung KuNo ratings yet
- The Meanings of Physics Equations and Physics EducDocument8 pagesThe Meanings of Physics Equations and Physics EducLola TomasNo ratings yet
- Hamiltonian For A Relativistic ParticleDocument6 pagesHamiltonian For A Relativistic ParticlekillaforeveahNo ratings yet
- Worksheet No. 4 Kinematic Equations of Motion 1 QuestionnaireDocument2 pagesWorksheet No. 4 Kinematic Equations of Motion 1 QuestionnaireAlfredo L. CariasoNo ratings yet
- Syllabus For IIT JAM 2015 - Joint Admission TestDocument9 pagesSyllabus For IIT JAM 2015 - Joint Admission TestXtremeInfosoftAlwarNo ratings yet
- مذكرة شرح Physics - فيزياء لغات للصف الاول الثانوى لمدارس اللغات-الامتحان التعليمىDocument20 pagesمذكرة شرح Physics - فيزياء لغات للصف الاول الثانوى لمدارس اللغات-الامتحان التعليمىRania Gamal Fouad100% (1)
- Solving Practical Engineering Mechanics Problems: DynamicsDocument185 pagesSolving Practical Engineering Mechanics Problems: DynamicsKamlesh Kamlesh Etwaro100% (1)
- Teacher Guide For Applied Science - Physics (Civil Group)Document30 pagesTeacher Guide For Applied Science - Physics (Civil Group)SagarBhiwandikarNo ratings yet