Download as pdf or txt
You might also like
- EE Correlation 1 PDFDocument111 pagesEE Correlation 1 PDFElenne Mendoza Mortel EvoraNo ratings yet
- Lesson Plan Inverse ProportionDocument1 pageLesson Plan Inverse ProportionJonathan Robinson100% (5)
- Lec13 PDFDocument7 pagesLec13 PDFanilNo ratings yet
- Fourier Transform, in 1D and in 2DDocument110 pagesFourier Transform, in 1D and in 2DMaram ShbairNo ratings yet
- 12 Fourier T XenDocument129 pages12 Fourier T Xenthuandvt97No ratings yet
- The Derivative of A Tensor-Valued Function of A Tensor : ANNE HOGER (Carnegie-Mellon University)Document15 pagesThe Derivative of A Tensor-Valued Function of A Tensor : ANNE HOGER (Carnegie-Mellon University)Emil SánchezNo ratings yet
- April 27, 2006 10:13 Book Trim Size For 9in X 6in FieldDocument10 pagesApril 27, 2006 10:13 Book Trim Size For 9in X 6in FieldShridhar MathadNo ratings yet
- EEM 306 Introduction To Communications: Department of Electrical and Electronics Engineering Anadolu UniversityDocument22 pagesEEM 306 Introduction To Communications: Department of Electrical and Electronics Engineering Anadolu UniversityHaroonRashidNo ratings yet
- Chap 4Document42 pagesChap 4Arthur StivanelloNo ratings yet
- On Double Laplace Transform and Double Sumudu TransformDocument6 pagesOn Double Laplace Transform and Double Sumudu TransformAJER JOURNALNo ratings yet
- Annals of MathematicsDocument19 pagesAnnals of MathematicsFadly NurullahNo ratings yet
- On The Increase Rate of Random Fields From Space On Unbounded DomainsDocument14 pagesOn The Increase Rate of Random Fields From Space On Unbounded DomainsJose Rafael CruzNo ratings yet
- EC403 Analog CommunicationDocument53 pagesEC403 Analog CommunicationMnshNo ratings yet
- Linear System and BackgroundDocument24 pagesLinear System and BackgroundEdmilson_Q_FilhoNo ratings yet
- Covariances of ARMA ProcessesDocument9 pagesCovariances of ARMA ProcessesRyan TeehanNo ratings yet
- F &2ax Da .: and Other Phenomena Are DiscussedDocument7 pagesF &2ax Da .: and Other Phenomena Are DiscussedAmit Kurmar SharmaNo ratings yet
- Letters Of: Ysical Review Fractal BaseDocument4 pagesLetters Of: Ysical Review Fractal BaseChandrasekaran SaravanakumarNo ratings yet
- Dynamics of Double Pipe Heat Exchangers: Explicit Time Domain SolutionsDocument8 pagesDynamics of Double Pipe Heat Exchangers: Explicit Time Domain SolutionsMohamed HasnaouiNo ratings yet
- Random Vector 2Document39 pagesRandom Vector 2NamdevNo ratings yet
- Window Fourier and Wavelet Transforms. Properties and Applications of WaveletsDocument23 pagesWindow Fourier and Wavelet Transforms. Properties and Applications of WaveletsAnshul SharmaNo ratings yet
- 1 Classical MechanicsDocument12 pages1 Classical MechanicsCHA N D sherNo ratings yet
- Chapter 2 Stationarity, Spectral Theorem, Ergodic Theorem (Lecture On 01-07-2021) - STAT 243 - Stochastic ProcessDocument4 pagesChapter 2 Stationarity, Spectral Theorem, Ergodic Theorem (Lecture On 01-07-2021) - STAT 243 - Stochastic ProcessProf. Madya Dr. Umar Yusuf MadakiNo ratings yet
- From Classical To Quantum Field Theory (Davison Soper)Document12 pagesFrom Classical To Quantum Field Theory (Davison Soper)Rosemary Muñoz100% (2)
- Some Mean Square Integral Inequalites Involving The Beta Function and Generalized Convex Stochatic ProcessesDocument10 pagesSome Mean Square Integral Inequalites Involving The Beta Function and Generalized Convex Stochatic ProcessesJORGE ELIECER HERNANDEZ HERNANDEZNo ratings yet
- Random Processes: Saravanan Vijayakumaran Sarva@ee - Iitb.ac - inDocument10 pagesRandom Processes: Saravanan Vijayakumaran Sarva@ee - Iitb.ac - inSonu kumarNo ratings yet
- CH 4 Part 1 SignalDocument8 pagesCH 4 Part 1 SignalSakib KabirNo ratings yet
- Journal of Algebra: Dongwen Liu, Yongchang ZhuDocument16 pagesJournal of Algebra: Dongwen Liu, Yongchang ZhuLuis FuentesNo ratings yet
- DWT and Tree ViewDocument22 pagesDWT and Tree ViewHind AlmisbahiNo ratings yet
- Probabilistic Structural Dynamics: Parametric vs. Nonparametric ApproachDocument39 pagesProbabilistic Structural Dynamics: Parametric vs. Nonparametric Approachejzuppelli8036No ratings yet
- Exercises Digital Signal ProcessingDocument51 pagesExercises Digital Signal ProcessingDC GreenNo ratings yet
- Chapter 2 - Lecture SlidesDocument74 pagesChapter 2 - Lecture SlidesJoel Tan Yi JieNo ratings yet
- Fujii 2 PDFDocument17 pagesFujii 2 PDFKidNo ratings yet
- An Introduction To Rough PathsDocument59 pagesAn Introduction To Rough PathsAriel MorgensternNo ratings yet
- MCMC: Metropolis Hastings AlgorithmDocument5 pagesMCMC: Metropolis Hastings AlgorithmTamás MákosNo ratings yet
- Partial DifferentiationDocument9 pagesPartial Differentiationsanoj kumarNo ratings yet
- Chapter 3: The Image, Its Mathematical and Physical BackgroundDocument53 pagesChapter 3: The Image, Its Mathematical and Physical BackgroundjeysamNo ratings yet
- 08 Bej137Document39 pages08 Bej137christoumpingfotsoNo ratings yet
- Dynamical Equations For Optimal Nonlinear Filtering: DX F (X, T) DT + W2 (X, T) DZDocument12 pagesDynamical Equations For Optimal Nonlinear Filtering: DX F (X, T) DT + W2 (X, T) DZhenrydclNo ratings yet
- Chiral DynamicsDocument18 pagesChiral Dynamicsharishyam kumarNo ratings yet
- Notes On Spectral MethodsDocument18 pagesNotes On Spectral MethodsrosoportNo ratings yet
- Chapter 3 Random Variable and Mathematical ExpectationDocument42 pagesChapter 3 Random Variable and Mathematical ExpectationAssimi DembéléNo ratings yet
- Slides 1Document20 pagesSlides 1siNo ratings yet
- The Plasma Dispersion Function: The Hilbert Transform of the GaussianFrom EverandThe Plasma Dispersion Function: The Hilbert Transform of the GaussianRating: 5 out of 5 stars5/5 (1)
- Chapter 2 - Lecture NotesDocument20 pagesChapter 2 - Lecture NotesJoel Tan Yi JieNo ratings yet
- PQT FormulaDocument13 pagesPQT FormulalogeshnandaNo ratings yet
- MIT8 324F10 Lecture11Document5 pagesMIT8 324F10 Lecture11Ayham ziadNo ratings yet
- Evaluation of Various Wiener Integrals by Use of Certain Sturm-Liouville Differential EquationsDocument18 pagesEvaluation of Various Wiener Integrals by Use of Certain Sturm-Liouville Differential EquationssjjarviNo ratings yet
- A Study of Linear Combination of Load EfDocument16 pagesA Study of Linear Combination of Load EfngodangquangNo ratings yet
- Harmonic Sections - Cotangent PDFDocument9 pagesHarmonic Sections - Cotangent PDFهشام الهنديNo ratings yet
- On Finite Hankel Transformation of Generalized Functions: L. S. DubeDocument14 pagesOn Finite Hankel Transformation of Generalized Functions: L. S. DubeIsaac SalinasNo ratings yet
- Finite Difference Modelling of The Full Acoustic Wave Equation in Matlab (REFERENCES)Document9 pagesFinite Difference Modelling of The Full Acoustic Wave Equation in Matlab (REFERENCES)Mikael Yuan EstuariwinarnoNo ratings yet
- A Numerical Algorithm Based On Rbfs For Solving An Inverse Source ProblemDocument10 pagesA Numerical Algorithm Based On Rbfs For Solving An Inverse Source ProblemAnibal Coronel PerezNo ratings yet
- International Geogebra Conference For Southeast Europe January 15-16, Novi Sad, SerbiaDocument15 pagesInternational Geogebra Conference For Southeast Europe January 15-16, Novi Sad, Serbiacarlos9leoNo ratings yet
- EE603 Class Notes John StensbyDocument34 pagesEE603 Class Notes John StensbyAman GuptaNo ratings yet
- A Short Introduction To Distribution Theory: 1 The Classical Fourier IntegralDocument16 pagesA Short Introduction To Distribution Theory: 1 The Classical Fourier IntegralJuan ZapataNo ratings yet
- T R F R T R: To Seismology Exercise 2Document1 pageT R F R T R: To Seismology Exercise 2UdhamNo ratings yet
- FLP L2 PDFDocument27 pagesFLP L2 PDFParhamNo ratings yet
- Differential Geometry For Physicists - Lecture4 - Manuel HohmannDocument9 pagesDifferential Geometry For Physicists - Lecture4 - Manuel HohmannSalim DávilaNo ratings yet
- Procesos EstacionariosDocument10 pagesProcesos Estacionariosdaniel18acNo ratings yet
- Chapter 5 Functions of Random VariablesDocument29 pagesChapter 5 Functions of Random VariablesAssimi DembéléNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Microsoft Word - 10 Ankur Jain 212-217Document6 pagesMicrosoft Word - 10 Ankur Jain 212-217Kamalesh BhowmikNo ratings yet
- 05 ChapterDocument27 pages05 ChapterKamalesh BhowmikNo ratings yet
- Seismic Performance of Tuned Mass Dampers With Uncertain ParametersDocument21 pagesSeismic Performance of Tuned Mass Dampers With Uncertain ParametersKamalesh BhowmikNo ratings yet
- Optimal Design of Tuned Mass Dampers Subjected To Continuous Stationary Critical ExcitationDocument11 pagesOptimal Design of Tuned Mass Dampers Subjected To Continuous Stationary Critical ExcitationKamalesh BhowmikNo ratings yet
- Application of Tuned Mass Dampers To Control Vibrations of Composite Floor SystemsDocument9 pagesApplication of Tuned Mass Dampers To Control Vibrations of Composite Floor SystemsKamalesh BhowmikNo ratings yet
- Practical Design of MDOF Structures With SupplemenDocument7 pagesPractical Design of MDOF Structures With SupplemenKamalesh BhowmikNo ratings yet
- Solution Manual For Calculus 11Th Edition by Larson and Edwards Isbn 9781337275347 Full Chapter PDFDocument36 pagesSolution Manual For Calculus 11Th Edition by Larson and Edwards Isbn 9781337275347 Full Chapter PDFbenjamin.smith112100% (15)
- Hardin Middle School Math Cheat SheetsDocument64 pagesHardin Middle School Math Cheat SheetsaaronNo ratings yet
- Classical Mechanics 4Document34 pagesClassical Mechanics 4Prabhat RayNo ratings yet
- Latihan 2 SMN3093 Calculus IDocument1 pageLatihan 2 SMN3093 Calculus IArvind RaveeNo ratings yet
- Types of NumbersDocument2 pagesTypes of NumbersKenji LogieNo ratings yet
- (Topologically Equivalent MetricsDocument2 pages(Topologically Equivalent MetricsTamoor AkhtarNo ratings yet
- iGCSE Edexcel Maths Jan 22 Paper 1HR QPDocument32 pagesiGCSE Edexcel Maths Jan 22 Paper 1HR QParcreanderNo ratings yet
- Chapter 05 Pictorial SketchingDocument36 pagesChapter 05 Pictorial SketchingMuhammad RashidNo ratings yet
- CH 5 - Arithmetic ProgressionsDocument24 pagesCH 5 - Arithmetic ProgressionsAarna GroverNo ratings yet
- Maths - Race#09Document2 pagesMaths - Race#09ayush hhhNo ratings yet
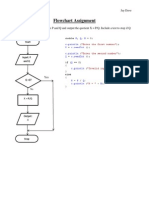
- Jay Dave Flowchart AssignmentDocument5 pagesJay Dave Flowchart Assignmentapi-225496804No ratings yet
- 8 2 Polar GraphsDocument3 pages8 2 Polar GraphsRaisa RashidNo ratings yet
- 1.3 Gauss Elimination MethodDocument6 pages1.3 Gauss Elimination Methodshravan mandalNo ratings yet
- DMW TheoremDocument13 pagesDMW TheoremwzcandyismNo ratings yet
- Improper IntegralsDocument28 pagesImproper Integralshyma kadakatlaNo ratings yet
- Delhi Public School Secunderabad, Nacharam: Holiday Assignment Science StreamDocument11 pagesDelhi Public School Secunderabad, Nacharam: Holiday Assignment Science StreamaethercodmNo ratings yet
- Algone62022 ExamDocument24 pagesAlgone62022 Exammitboyusa17No ratings yet
- Mathematics P2 May-June 2019 EngDocument16 pagesMathematics P2 May-June 2019 EngTshego LeotwaneNo ratings yet
- Phy 105 Problem Set 1 Solutions 2012Document9 pagesPhy 105 Problem Set 1 Solutions 2012pbrowning9416No ratings yet
- MATH10 Lesson 3Document47 pagesMATH10 Lesson 3Bea OroNo ratings yet
- Transient Loads On HalfspaceDocument10 pagesTransient Loads On HalfspaceJosh PompierNo ratings yet
- 2010 Gerak Gempur Perak Amath 1Document0 pages2010 Gerak Gempur Perak Amath 1Carolyn Chang Boon ChuiNo ratings yet
- Limits and ContinuityDocument41 pagesLimits and Continuityrofi modiNo ratings yet
- Differential Equations (MA 1150) : SukumarDocument52 pagesDifferential Equations (MA 1150) : SukumarMansi NanavatiNo ratings yet
- MultiGrid Method (CFD) by AttaDocument18 pagesMultiGrid Method (CFD) by AttaAtta ur RehmanNo ratings yet
- Kvs Maths Hy Question 22 23Document4 pagesKvs Maths Hy Question 22 23Rohit KumarNo ratings yet
- SAM3001 CFD End Sem Question MO 2020Document1 pageSAM3001 CFD End Sem Question MO 2020Ashok PriyadarshiNo ratings yet
- POLYMATH TutorialChemical Reaction Engineering PDFDocument8 pagesPOLYMATH TutorialChemical Reaction Engineering PDFAfifah SabriNo ratings yet