Download as pdf or txt
You might also like
- Electrical Circuits and Circuit AnalysisDocument147 pagesElectrical Circuits and Circuit AnalysisGuruKPO100% (3)
- Quantitative Modeling and Simulation of Single-Electron TransistorDocument7 pagesQuantitative Modeling and Simulation of Single-Electron TransistorAnonymous kw8Yrp0R5rNo ratings yet
- Maintenance Handbook On Transformer of 3 Phase Electric Locomotive PDFDocument59 pagesMaintenance Handbook On Transformer of 3 Phase Electric Locomotive PDFLokendraNo ratings yet
- Self Running Free Energy Device Muller Motor Generator Romerouk Version1 1Document25 pagesSelf Running Free Energy Device Muller Motor Generator Romerouk Version1 1Hydrostatic0013100% (5)
- The Elusive Memristor: Properties of Basic Electrical CircuitsDocument24 pagesThe Elusive Memristor: Properties of Basic Electrical CircuitsKapil BhardwajNo ratings yet
- MemristorDocument30 pagesMemristorjoseph458No ratings yet
- Seminar Report ON Memristor: Guru Nanak Dev University, AmritsarDocument28 pagesSeminar Report ON Memristor: Guru Nanak Dev University, AmritsarnipuntandanNo ratings yet
- MemristorDocument18 pagesMemristorNaveed BashirNo ratings yet
- Design of Memristor: A Paper Presentation OnDocument12 pagesDesign of Memristor: A Paper Presentation Onnightking_1No ratings yet
- A Seminar ReportDocument30 pagesA Seminar ReportSanthanu Surendran100% (1)
- Problem StatementDocument11 pagesProblem StatementprathameshNo ratings yet
- MemristoriDocument12 pagesMemristorirb2598No ratings yet
- Review MemristorDocument8 pagesReview Memristorparth2991No ratings yet
- Raju DocuDocument27 pagesRaju DocuRaju Goud RajuNo ratings yet
- Java For WebDocument5 pagesJava For Webmit111No ratings yet
- Me M ResistorDocument9 pagesMe M ResistorNitya SiddagangappaNo ratings yet
- Ak Electronic Devices Unit 1Document8 pagesAk Electronic Devices Unit 1Shirin RazdanNo ratings yet
- Basic Concept of ElectricityDocument8 pagesBasic Concept of Electricityvamps sierNo ratings yet
- Basic Electrical Engineering Theory 2020-21Document177 pagesBasic Electrical Engineering Theory 2020-21Mohit PatilNo ratings yet
- Electron Devices and Circuits 2 Marks Q ADocument30 pagesElectron Devices and Circuits 2 Marks Q AVenkat ManiNo ratings yet
- Midterm AssignmentDocument7 pagesMidterm AssignmentEzekiel BrizuelaNo ratings yet
- Definition:: By: Arjun C MemristorDocument19 pagesDefinition:: By: Arjun C Memristorrakshith_kr_1No ratings yet
- Magnetic Flux: ' Between The Terminals Is A Function of The Amount of Electric Charge Q' That Has PassedDocument27 pagesMagnetic Flux: ' Between The Terminals Is A Function of The Amount of Electric Charge Q' That Has PassedravitejapotuNo ratings yet
- p240 MemristorDocument5 pagesp240 MemristorGopi ChannagiriNo ratings yet
- Design of Hspice Model For Dual-Doped Memristor: Electronics and Communication EngineeringDocument6 pagesDesign of Hspice Model For Dual-Doped Memristor: Electronics and Communication EngineeringAshish JainNo ratings yet
- Unesco - Eolss Sample Chapters: Electric and Magnetic Circuits and FieldsDocument9 pagesUnesco - Eolss Sample Chapters: Electric and Magnetic Circuits and Fieldstobechukwuevarestus9No ratings yet
- Two-Element Dc-Driven Series LRC Circuits: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDocument8 pagesTwo-Element Dc-Driven Series LRC Circuits: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic WinNo ratings yet
- Unesco - Eolss Sample Chapters: Network AnalysisDocument8 pagesUnesco - Eolss Sample Chapters: Network AnalysisGangadharaNo ratings yet
- Basic ElectronicsDocument47 pagesBasic ElectronicsPolyn LopezNo ratings yet
- 1P2 Circuit Analysis I Notes Moore PDFDocument68 pages1P2 Circuit Analysis I Notes Moore PDFTeddyNo ratings yet
- Miller 1990 Modeling Ferr CapacitorsDocument10 pagesMiller 1990 Modeling Ferr CapacitorsFroy MartinezNo ratings yet
- Transmission Line NotesDocument140 pagesTransmission Line NotesAlessandro FantinoNo ratings yet
- 3rd Term PhysicsDocument14 pages3rd Term Physicssaidu musaNo ratings yet
- ELECTRON DEVICES AND CIRCUITS: 2 Marks Q & ADocument28 pagesELECTRON DEVICES AND CIRCUITS: 2 Marks Q & Ag jagadeesan83% (6)
- 3RD Term S1 PhysicsDocument14 pages3RD Term S1 PhysicsMARYQUEEN AMARACHUKWUNo ratings yet
- Witricity Seminar ReportDocument8 pagesWitricity Seminar ReportMohammed MusifNo ratings yet
- MemristorDocument12 pagesMemristorkrish2601scribdNo ratings yet
- 3RD TERM SS1 PHYSICS Scheme of WorkDocument15 pages3RD TERM SS1 PHYSICS Scheme of Workloveandreverb100% (1)
- Chapter 12: Electrical Properties: Charge Carriers and ConductionDocument22 pagesChapter 12: Electrical Properties: Charge Carriers and ConductionJovan LlaneraNo ratings yet
- Variable-Range Hopping in Quasi-One-Dimensional Electron CrystalsDocument18 pagesVariable-Range Hopping in Quasi-One-Dimensional Electron CrystalsAjayaKumarKavalaNo ratings yet
- Circuit AnalysisDocument22 pagesCircuit AnalysisDHANUSH Racer100% (2)
- Vel's University: Unit 1Document6 pagesVel's University: Unit 1Arun KumarNo ratings yet
- E109 - AgustinDocument25 pagesE109 - AgustinSeth Jarl G. AgustinNo ratings yet
- Memristor: The Missing Link Discovered: AcknowledgementDocument25 pagesMemristor: The Missing Link Discovered: Acknowledgement9999igiNo ratings yet
- Measuring The Specific Contact Resistance of Contacts To Semiconductor NanowiresDocument6 pagesMeasuring The Specific Contact Resistance of Contacts To Semiconductor NanowiresJaka Sembung GolokNo ratings yet
- Chemical Capacitance and ImplicationDocument11 pagesChemical Capacitance and Implicationadriand13No ratings yet
- Kirchhoff's Voltage Law Corrected For Radiating Circuits: Vitor Lara, Kaled DechoumDocument5 pagesKirchhoff's Voltage Law Corrected For Radiating Circuits: Vitor Lara, Kaled Dechoumjessicakh aNo ratings yet
- Physics: Senior Secondary School: ThirdDocument32 pagesPhysics: Senior Secondary School: ThirdAdio Babatunde Abiodun CabaxNo ratings yet
- Beeie Lecture - NotesDocument210 pagesBeeie Lecture - Notesmuru54321No ratings yet
- The Genesis of Molecular ElectronicsDocument33 pagesThe Genesis of Molecular ElectronicsTripathiNirupamaNo ratings yet
- GR Bee PPTS Unit - I To IvDocument205 pagesGR Bee PPTS Unit - I To IvSri HarshaNo ratings yet
- Surface Charges and Fields of Simple Circuits: Norris W. PreyerDocument5 pagesSurface Charges and Fields of Simple Circuits: Norris W. PreyerAzra H.No ratings yet
- 1st Sem Basic ElectricalDocument98 pages1st Sem Basic ElectricalkmanikecNo ratings yet
- Modeling of Three Phase Autotransformer For Short Circuit StudiesDocument8 pagesModeling of Three Phase Autotransformer For Short Circuit Studiesbubo28No ratings yet
- 2 Introduction To Microwave Circuits and Transmission Line TheoryDocument15 pages2 Introduction To Microwave Circuits and Transmission Line TheoryYohannes NakachewNo ratings yet
- Syllabus UEE001 ELECTRICAL ENGINEERINGDocument2 pagesSyllabus UEE001 ELECTRICAL ENGINEERINGWarden Hostel GNo ratings yet
- CBSE Class 10 Science Revision Notes Chapter - 12 ElectricityDocument12 pagesCBSE Class 10 Science Revision Notes Chapter - 12 ElectricityApoorva HinduNo ratings yet
- The Missing Memristor Found'Document5 pagesThe Missing Memristor Found'AmmuNo ratings yet
- An Adaptive Window Function Based Memristor ModelDocument5 pagesAn Adaptive Window Function Based Memristor ModelAmmuNo ratings yet
- A Memristor Model With Peicewise Window FunctionDocument6 pagesA Memristor Model With Peicewise Window FunctionAmmuNo ratings yet
- Ventilatorspecs 2020 Covid 19 OutbreakDocument3 pagesVentilatorspecs 2020 Covid 19 OutbreakAmmuNo ratings yet
- Basic Ecg PP Tall SlidesDocument15 pagesBasic Ecg PP Tall SlidesAmmuNo ratings yet
- V. Kaznacheev - Kozyrev MirrorsDocument28 pagesV. Kaznacheev - Kozyrev MirrorsKalpa235No ratings yet
- Isolated Bipolar Modular Multilevel DC-DC Converter With Self-Balancing Capability For Interconnection of MVDC and LVDC GridsDocument15 pagesIsolated Bipolar Modular Multilevel DC-DC Converter With Self-Balancing Capability For Interconnection of MVDC and LVDC GridsAshish kumar N HNo ratings yet
- Basic Electrical Engineering 1st-year-LMDocument76 pagesBasic Electrical Engineering 1st-year-LMkunal beheraNo ratings yet
- A Material With A Wider Hysteresis Loop HasDocument4 pagesA Material With A Wider Hysteresis Loop HaspktienNo ratings yet
- High-Pass and Low-Pass Filters: Fig. 1: Experimental Set-UpDocument5 pagesHigh-Pass and Low-Pass Filters: Fig. 1: Experimental Set-UpsemabayNo ratings yet
- Automatic Coil WinderDocument27 pagesAutomatic Coil WinderWil Nelson100% (1)
- A Technical Report On Transformer After Visiting A Transformer Repairing CenterDocument4 pagesA Technical Report On Transformer After Visiting A Transformer Repairing CenterrakeshNo ratings yet
- Analogies: Analogies Give Engineers Insight!Document13 pagesAnalogies: Analogies Give Engineers Insight!Soma GopalakrishnaNo ratings yet
- Axial - Ux Permanent-Magnet Machine Modeling, Design, Simulation and AnalysisDocument26 pagesAxial - Ux Permanent-Magnet Machine Modeling, Design, Simulation and Analysisantriksh mahajan100% (1)
- The Electrical ExperimenterDocument15 pagesThe Electrical ExperimenterKostya MarhaiNo ratings yet
- Delta FerriteDocument9 pagesDelta FerritealadinsaneNo ratings yet
- Design and Implementation of Luo Converter For Electric Vehicle ApplicationsDocument5 pagesDesign and Implementation of Luo Converter For Electric Vehicle ApplicationsseventhsensegroupNo ratings yet
- Short Wave Diathermy Lecture 2013Document69 pagesShort Wave Diathermy Lecture 2013Faisal Qureshi100% (3)
- Intorduction To Power Engineering - 4 GeneratorsDocument26 pagesIntorduction To Power Engineering - 4 Generatorssyedsalmanali91No ratings yet
- Solenoid Coil K.35/16 To VDE 0580: Description Function Application Caution: To Avoid Overheating The Coil MayDocument2 pagesSolenoid Coil K.35/16 To VDE 0580: Description Function Application Caution: To Avoid Overheating The Coil MayЕвгений ШкарупеловNo ratings yet
- AC Chapter-22 PDFDocument32 pagesAC Chapter-22 PDFsjahsnjNo ratings yet
- VCO 900 MHZ - 1 PDFDocument2 pagesVCO 900 MHZ - 1 PDFpu2ypvNo ratings yet
- 4A, 21V 500Khz Synchronous Step-Down Converter: General Description FeaturesDocument14 pages4A, 21V 500Khz Synchronous Step-Down Converter: General Description FeaturesRakesh SutharNo ratings yet
- Very Simple 9v Tesla Coil - Instructables PDFDocument16 pagesVery Simple 9v Tesla Coil - Instructables PDFpolikarpaNo ratings yet
- PHY098 Topic1.6.4 Chapter21 Arda&SyikinDocument21 pagesPHY098 Topic1.6.4 Chapter21 Arda&SyikinDAYANG NURHAIZA AWANG NORAWINo ratings yet
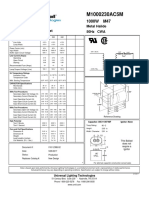
- M1000230AC5MDocument1 pageM1000230AC5MPlant Site KMI-KJANo ratings yet
- DER EE DE-5000 English User ManualDocument19 pagesDER EE DE-5000 English User ManualRenatoBašić100% (2)
- @NEETpassionate AIATS 3 (2021)Document41 pages@NEETpassionate AIATS 3 (2021)duraibiotechNo ratings yet
- Answer Key - Pgcil nr1Document50 pagesAnswer Key - Pgcil nr1Sakshi RastogiNo ratings yet
- Introscan BrochureDocument6 pagesIntroscan BrochuremartinnagelwNo ratings yet
- Man4359b Punch2ch ManDocument72 pagesMan4359b Punch2ch ManAntonio Perez PerezNo ratings yet
- DC GeneratorsDocument22 pagesDC GeneratorsRajendra Prasad SanapalaNo ratings yet
- 1 2 Chapter1 Basic Concept of EM w1Document12 pages1 2 Chapter1 Basic Concept of EM w1Paramaet TamNo ratings yet