Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- An Efficient Regenerative Braking System Based On Battery Supercapacitor For Electric Hybrid and Plug-In Hybrid Electric Vehicles With BLDC MotorDocument15 pagesAn Efficient Regenerative Braking System Based On Battery Supercapacitor For Electric Hybrid and Plug-In Hybrid Electric Vehicles With BLDC MotorsathishNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Suresh 2019Document20 pagesSuresh 2019sathishNo ratings yet
- A Novel Single-Input Dual-Output ThreeLevel DC-DC ConverterDocument11 pagesA Novel Single-Input Dual-Output ThreeLevel DC-DC ConvertersathishNo ratings yet
- Droop Control of Bi-Directional DC-DC Converter For Improved Voltage Regulation and Load Sharing in DC MicrogridDocument16 pagesDroop Control of Bi-Directional DC-DC Converter For Improved Voltage Regulation and Load Sharing in DC MicrogridsathishNo ratings yet
- Applied Sciences: Artificial Intelligence-Based Controller For DC-DC Flyback ConverterDocument22 pagesApplied Sciences: Artificial Intelligence-Based Controller For DC-DC Flyback Convertersathish100% (1)
- Emperor Penguins ColonyDocument16 pagesEmperor Penguins ColonysathishNo ratings yet
- Sliding Mode Control Based On Fractional Order Calculus For DC-DC ConvertersDocument15 pagesSliding Mode Control Based On Fractional Order Calculus For DC-DC ConverterssathishNo ratings yet
- Chakrabarti 2019Document46 pagesChakrabarti 2019sathishNo ratings yet
- Applied SciencesDocument18 pagesApplied SciencessathishNo ratings yet
- Journal of King Saud University - Engineering Sciences: Montadher S. Shaker, Asaad A. KraidiDocument7 pagesJournal of King Saud University - Engineering Sciences: Montadher S. Shaker, Asaad A. KraidisathishNo ratings yet
- Research Article: Fuzzy Second-Order Sliding Mode Control Design For A Two-Cell DC-DC ConverterDocument9 pagesResearch Article: Fuzzy Second-Order Sliding Mode Control Design For A Two-Cell DC-DC ConvertersathishNo ratings yet
- 7.fabrication of Adaptive Cruise ControlDocument2 pages7.fabrication of Adaptive Cruise ControlsathishNo ratings yet
- 6.fabrication of Pedal Operating Podride CarDocument2 pages6.fabrication of Pedal Operating Podride CarsathishNo ratings yet
- 1.fabrication of Borewell Pipe Removing MachineDocument2 pages1.fabrication of Borewell Pipe Removing MachinesathishNo ratings yet
- 12.design and Fabrication of Manual Mixer Grinder MachineDocument2 pages12.design and Fabrication of Manual Mixer Grinder MachinesathishNo ratings yet
- 11.fabrication of Bike TrolleyDocument1 page11.fabrication of Bike TrolleysathishNo ratings yet
- Sazz ConverterDocument251 pagesSazz ConvertersathishNo ratings yet
- A 97.0% Maximum Efficiency, Fast Response, Low Voltage Ripple KY Boost Converter For Photovoltaic ApplicationDocument5 pagesA 97.0% Maximum Efficiency, Fast Response, Low Voltage Ripple KY Boost Converter For Photovoltaic ApplicationsathishNo ratings yet
- M15 1 2 7 2014 PDFDocument8 pagesM15 1 2 7 2014 PDFsathishNo ratings yet
- Electric BikeDocument20 pagesElectric Bikesathish100% (1)
- Sources of Biomedical Signals, Basic Medical Instrumentation SystemDocument2 pagesSources of Biomedical Signals, Basic Medical Instrumentation SystemsathishNo ratings yet
- Preventa XPS Universal - XPSUAT13A3ACDocument8 pagesPreventa XPS Universal - XPSUAT13A3ACgeocaustasNo ratings yet
- Energy Audit Field ReportDocument5 pagesEnergy Audit Field ReporttaksasNo ratings yet
- Eaton Ats Breaker Design Guide Ca140003enDocument27 pagesEaton Ats Breaker Design Guide Ca140003enJeyakumarNo ratings yet
- TCD 23: Run CPU SPEC Data Sum Error TCD 24: Run CPU Communication Data Sum Error TCD - 023 TCD - 024Document1 pageTCD 23: Run CPU SPEC Data Sum Error TCD 24: Run CPU Communication Data Sum Error TCD - 023 TCD - 024Daniel GatdulaNo ratings yet
- Bass BL10-100X: General SpecificationsDocument1 pageBass BL10-100X: General SpecificationsDaniel MambuscayNo ratings yet
- Ch7 Frequency Response PDFDocument50 pagesCh7 Frequency Response PDFtareq omarNo ratings yet
- Wireless Power Transfer Circuit and Its WorkingDocument4 pagesWireless Power Transfer Circuit and Its Workingpetchimuthu87No ratings yet
- Rotation 1-3kVA User Manual BORRI V2Document28 pagesRotation 1-3kVA User Manual BORRI V2gozzer25100% (1)
- Computer Network Lab: Presented By: Md. Fahad Bin ZamalDocument62 pagesComputer Network Lab: Presented By: Md. Fahad Bin ZamalTanvir Zaman AsifNo ratings yet
- Bus Ele Cat 10506 HSFDocument100 pagesBus Ele Cat 10506 HSFnurriedayatNo ratings yet
- Canalis KN Kna160ab4Document2 pagesCanalis KN Kna160ab4Glenn Midel Delos SantosNo ratings yet
- Nihon Kohden Meb 9400 Service ManualDocument112 pagesNihon Kohden Meb 9400 Service ManualJavier Alejandro Camacho CamachoNo ratings yet
- CENTENNIAL COLLEGE Program Availability List For JAN 2022 Intake 28.09Document13 pagesCENTENNIAL COLLEGE Program Availability List For JAN 2022 Intake 28.09tejasNo ratings yet
- FG2C/FG3C: Function GeneratorDocument44 pagesFG2C/FG3C: Function GeneratorSteven DonosoNo ratings yet
- Gysmi Tig 160 HFDocument6 pagesGysmi Tig 160 HFAugustoferreira Ferreira100% (1)
- Electrical InstallationDocument9 pagesElectrical InstallationIvan BuhiinzaNo ratings yet
- Akx 14Document116 pagesAkx 14Edgard DelRio100% (1)
- Alwasy Step Ahead in TechnologyDocument6 pagesAlwasy Step Ahead in TechnologyDxFxNo ratings yet
- BSX Ifm 10thDocument360 pagesBSX Ifm 10thGeorge FărcașNo ratings yet
- Spell Kit ManualDocument40 pagesSpell Kit ManualDavid CuadradoNo ratings yet
- Fast Radix-2 Algorithm For The Discrete Hartley Transform of Type IIDocument3 pagesFast Radix-2 Algorithm For The Discrete Hartley Transform of Type IIManish BansalNo ratings yet
- Power Electronics Devices...Document21 pagesPower Electronics Devices...Brian omondiNo ratings yet
- Solar Tracking SystemDocument6 pagesSolar Tracking SystemUncle TravelsNo ratings yet
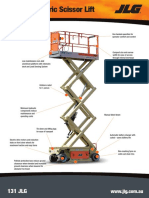
- 2030ES Scissor Lift FlyerDocument2 pages2030ES Scissor Lift FlyerVictor LuqueNo ratings yet
- Generating Insight - Edition 4 - 2013Document16 pagesGenerating Insight - Edition 4 - 2013gilizaniniNo ratings yet
- Service Manual English: Downloaded From Manuals Search EngineDocument177 pagesService Manual English: Downloaded From Manuals Search Enginedante pamungkasNo ratings yet
- IRIS-Code AllDocument10 pagesIRIS-Code AllAhmad FallahiNo ratings yet
- Weg Automation Cfw-09 Users ManualDocument363 pagesWeg Automation Cfw-09 Users ManualSebas GambaNo ratings yet
- Item No. Description UnitDocument2 pagesItem No. Description UnitĐức LêNo ratings yet
- Power System Protection QPDocument2 pagesPower System Protection QPmaniNo ratings yet