Download as pdf or txt
You might also like
- A Linear-quadratic-Gaussian Control Algorithm For Sulphide Ore GrindingDocument8 pagesA Linear-quadratic-Gaussian Control Algorithm For Sulphide Ore Grindingjsotofmet4918No ratings yet
- A N Experimental Study An Isothermal System: Song M. DouglasDocument7 pagesA N Experimental Study An Isothermal System: Song M. DouglasGustavo Gabriel JimenezNo ratings yet
- Circulating LoadDocument6 pagesCirculating LoadDaniela Maria Bernal EscobarNo ratings yet
- Floquet Modal Analysis of A Teetered-Rotor Wind Turbine: Karl StolDocument8 pagesFloquet Modal Analysis of A Teetered-Rotor Wind Turbine: Karl StolAnonymous UoHUagNo ratings yet
- Linear State-Feedback Control of A Boost Converter For Large-Signal StabilityDocument7 pagesLinear State-Feedback Control of A Boost Converter For Large-Signal StabilityAMIR SOHAILNo ratings yet
- Dynamic Modeling and Optimization of Batch Crystallization ProcessesDocument6 pagesDynamic Modeling and Optimization of Batch Crystallization Processesishwarya rNo ratings yet
- La Commande Par Mode Glissant 02Document5 pagesLa Commande Par Mode Glissant 02imene BouguetofNo ratings yet
- Dynamics and Identification of A Binary Distillation ColumnDocument11 pagesDynamics and Identification of A Binary Distillation ColumnMMHFNo ratings yet
- Adaptive Control of Uncertain Gear Transmission Servo Systems With Deadzone NonlinearityDocument9 pagesAdaptive Control of Uncertain Gear Transmission Servo Systems With Deadzone Nonlinearitysaleh1978No ratings yet
- Operability of Chemical Reactors: Multiplicity Behavior of A Jacketed Styrene Polymerization ReactorDocument50 pagesOperability of Chemical Reactors: Multiplicity Behavior of A Jacketed Styrene Polymerization Reactorfirdoshkhan715No ratings yet
- Polymerization Reactor Control: W. HarmonDocument6 pagesPolymerization Reactor Control: W. HarmonRawlinsonNo ratings yet
- Minerals Engineering: C.W. Steyn, C. SandrockDocument11 pagesMinerals Engineering: C.W. Steyn, C. SandrockMario Alejandro Leon GaticaNo ratings yet
- Parametric Study of Unsteady-State #Ow Modulation in Trickle-Bed ReactorsDocument11 pagesParametric Study of Unsteady-State #Ow Modulation in Trickle-Bed ReactorsFarah Talib Al-sudaniNo ratings yet
- AR - Part IIDocument18 pagesAR - Part IIDeepshikhaSinghNo ratings yet
- Fuzzy Predictive Control of A Solar Power PlantDocument11 pagesFuzzy Predictive Control of A Solar Power PlantFernando Acevedo FernandezNo ratings yet
- Membrane Reactors For Catalytic Series and Series-Parallel ReactionsDocument10 pagesMembrane Reactors For Catalytic Series and Series-Parallel ReactionsrukwavuNo ratings yet
- Valenzuela 1993Document12 pagesValenzuela 1993Diego MonteNo ratings yet
- Feasible Products in Batch Reactive Distillation: Zhe Guo, Mudassir Ghufran, and Jae W. LeeDocument12 pagesFeasible Products in Batch Reactive Distillation: Zhe Guo, Mudassir Ghufran, and Jae W. LeeRaúl AponteNo ratings yet
- Control Engineering Practice Volume 1 Issue 6 1993 OllDocument9 pagesControl Engineering Practice Volume 1 Issue 6 1993 OllAhmed AbassNo ratings yet
- The Dynamic Behavior of Continuous Solution Polymerization Reactors - Vii. Experimental Study of A Copolymerization ReactorDocument22 pagesThe Dynamic Behavior of Continuous Solution Polymerization Reactors - Vii. Experimental Study of A Copolymerization ReactoraarothermelNo ratings yet
- A Method For Assessing Membrane Fouling in Pilot-And Full-Scale SystemsDocument7 pagesA Method For Assessing Membrane Fouling in Pilot-And Full-Scale SystemsShakeel ur Rehman LashariNo ratings yet
- Safe Design and Operation of Fluidized-Bed Reactors: Choice Between Reactor ModelsDocument22 pagesSafe Design and Operation of Fluidized-Bed Reactors: Choice Between Reactor ModelsKarenRosioMoreiraCruzNo ratings yet
- Tie 2006 878309Document11 pagesTie 2006 878309kimoNo ratings yet
- Disturbance Models For Offset-Free Model-Predictive Control - Very ImportnatDocument12 pagesDisturbance Models For Offset-Free Model-Predictive Control - Very Importnatrawand ehssanNo ratings yet
- A Control Scheme For Packed Bed Reactors Having A Changing Catalyst Activity Profile. I: On-Line Parameter Estimation and Feedback ControlDocument20 pagesA Control Scheme For Packed Bed Reactors Having A Changing Catalyst Activity Profile. I: On-Line Parameter Estimation and Feedback Controlکبری ادریس رسولNo ratings yet
- 2001 Frequency-Domain Analysis of Three-Phase Linear Current Regulators PDFDocument10 pages2001 Frequency-Domain Analysis of Three-Phase Linear Current Regulators PDFdhirajlovesmaaNo ratings yet
- Lode 2003Document14 pagesLode 2003Ionut BanuNo ratings yet
- A New Robust Weight Update For Cerebellar Model Articulation Controller Adaptive Control With Application To Transcritical Organic Rankine CyclesDocument13 pagesA New Robust Weight Update For Cerebellar Model Articulation Controller Adaptive Control With Application To Transcritical Organic Rankine CyclesDalia MuraddNo ratings yet
- Gac Wedge EaaiDocument14 pagesGac Wedge EaaijinxichangeNo ratings yet
- Fuzzy Swing-Up and Fuzzy Sliding-Mode Balance Control For A Planetary-Gear-Type Inverted PendulumDocument11 pagesFuzzy Swing-Up and Fuzzy Sliding-Mode Balance Control For A Planetary-Gear-Type Inverted PendulumKuldeep KumarNo ratings yet
- Discrete-Time Variable Structure Controller With A Decoupled Disturbance Compensator and Its Application To A CNC ServomechanismDocument10 pagesDiscrete-Time Variable Structure Controller With A Decoupled Disturbance Compensator and Its Application To A CNC ServomechanismFernando OrnelasNo ratings yet
- Steady-State Analyses For Reactive Distillation Control: An MTBE Case StudyDocument10 pagesSteady-State Analyses For Reactive Distillation Control: An MTBE Case Studymiguel angel hernandez osorioNo ratings yet
- 01 - Visualization of The Controller States of An Autogenous Mill From Time Series DataDocument9 pages01 - Visualization of The Controller States of An Autogenous Mill From Time Series DataVictorNo ratings yet
- Processes 07 00615Document13 pagesProcesses 07 00615Adnan Ahmed ChahalNo ratings yet
- Analysis of Simulated Moving Bed Reactors-Cristino MiglioriniDocument6 pagesAnalysis of Simulated Moving Bed Reactors-Cristino MiglioriniShaikh RazzakNo ratings yet
- A Sensorless Kalman Filter-Based Active Damping Technique For Grid-Tied VSI With LCL FilterDocument10 pagesA Sensorless Kalman Filter-Based Active Damping Technique For Grid-Tied VSI With LCL FilternamngoclhuNo ratings yet
- Objective: Presenting Author: Santosh Shinde 1 1Document2 pagesObjective: Presenting Author: Santosh Shinde 1 1santvssNo ratings yet
- 1998 - Minemura Et Al. - Prediction of Air-Water Two-Phase Flow Performance of A Centrifugal Pump Based On One-Dimensional Two-Fluid ModelDocument8 pages1998 - Minemura Et Al. - Prediction of Air-Water Two-Phase Flow Performance of A Centrifugal Pump Based On One-Dimensional Two-Fluid ModelCesar AlataNo ratings yet
- Reduced-Order Modeling of Inverter-Based Generation Using Hybrid Singular PerturbationDocument8 pagesReduced-Order Modeling of Inverter-Based Generation Using Hybrid Singular PerturbationM8ow6fNo ratings yet
- 2006 Wang Sliding ModeDocument8 pages2006 Wang Sliding ModeCumhur ÖzbaşNo ratings yet
- Of ForDocument6 pagesOf ForDhanesh SambariyaNo ratings yet
- Design of Robust Controllers For Gas Turbine Engines: D. E. Moellenhotf S. Vittal RaoDocument7 pagesDesign of Robust Controllers For Gas Turbine Engines: D. E. Moellenhotf S. Vittal RaoMehrshad GhasemabadiNo ratings yet
- Simulation IEEEDocument21 pagesSimulation IEEEPablo Jose Prieto EntenzaNo ratings yet
- Feedback Linearization of Active Magnetic Bearings Current-Mode Implementation (Min Chen and Carl R. Knospe, Member, IEEE)Document8 pagesFeedback Linearization of Active Magnetic Bearings Current-Mode Implementation (Min Chen and Carl R. Knospe, Member, IEEE)Vu MinhNo ratings yet
- Austin and BrameDocument14 pagesAustin and BrametjatonlineNo ratings yet
- Analysis and Validation of A Run-Of-Mine Ore Grinding Mill Circuit Model For Process ControlDocument15 pagesAnalysis and Validation of A Run-Of-Mine Ore Grinding Mill Circuit Model For Process ControlHubert Ventura HinostrozaNo ratings yet
- Average and Small-Signal Modeling of Self-Oscillating Flyback Converter With Applied Switching DelayDocument8 pagesAverage and Small-Signal Modeling of Self-Oscillating Flyback Converter With Applied Switching DelayMohamed HaddadNo ratings yet
- Dynamics of Flexible Manipulator Arms Alternative Derivation, Verification, and Charasteristics For ControlDocument10 pagesDynamics of Flexible Manipulator Arms Alternative Derivation, Verification, and Charasteristics For ControlParthPatelNo ratings yet
- Rough-Granular Approach For Impulse Fault Classification of Transformers Using Cross-Wavelet TransformDocument8 pagesRough-Granular Approach For Impulse Fault Classification of Transformers Using Cross-Wavelet TransformDebojyoti MukherjeeNo ratings yet
- Lucca Et Al-2008-Macromolecular Symposia PDFDocument7 pagesLucca Et Al-2008-Macromolecular Symposia PDFAhmadNo ratings yet
- Stephan 1991Document13 pagesStephan 1991mero zghloulNo ratings yet
- Ierarchical Control of IcrogridsDocument1 pageIerarchical Control of IcrogridsvainateyagoldarNo ratings yet
- Control - of - Rotary - Inverted - Pendulum - Using - Model-FrDocument9 pagesControl - of - Rotary - Inverted - Pendulum - Using - Model-FrSebastian ReyesNo ratings yet
- Dynamic Operation of Chemical Reactors Friend or FoeDocument9 pagesDynamic Operation of Chemical Reactors Friend or FoeSteve Wan100% (1)
- Modeling of Fixed Bed Catalytic Reactors: Computers & Chemical Engineering December 1985Document12 pagesModeling of Fixed Bed Catalytic Reactors: Computers & Chemical Engineering December 1985sergioln001No ratings yet
- Fluid Phase Equilibria: Younas Dadmohammadi, Solomon Gebreyohannes, Brian J. Neely, Khaled A.M. GasemDocument9 pagesFluid Phase Equilibria: Younas Dadmohammadi, Solomon Gebreyohannes, Brian J. Neely, Khaled A.M. GasemDianaMorenoNo ratings yet
- Modelling and Dynamics of An Extractive Distillation ColumnDocument10 pagesModelling and Dynamics of An Extractive Distillation Columnsalvatore raffaNo ratings yet
- State Space Model Predictive Control of A Reactive Distillation ProcessDocument14 pagesState Space Model Predictive Control of A Reactive Distillation Processanuj1166No ratings yet
- Electrical Circuits with Variable Parameters: Including Pulsed-Control SystemsFrom EverandElectrical Circuits with Variable Parameters: Including Pulsed-Control SystemsNo ratings yet
- Classical Approach to Constrained and Unconstrained Molecular DynamicsFrom EverandClassical Approach to Constrained and Unconstrained Molecular DynamicsNo ratings yet
- 3574.01-PDC-001 Process Design Criteria Rev GDocument10 pages3574.01-PDC-001 Process Design Criteria Rev GBUDI HARIANTONo ratings yet
- Review No 157Document7 pagesReview No 157M.IBRAHEEMNo ratings yet
- 12 Machinery EbookDocument135 pages12 Machinery EbookPimen AjjahNo ratings yet
- Chapter 11 - ComminutionDocument49 pagesChapter 11 - ComminutionalnemangiNo ratings yet
- SAG & AG Mill Article - Mining Monthly - June10Document8 pagesSAG & AG Mill Article - Mining Monthly - June10Peluche de PapelNo ratings yet
- CaterpillarDocument3 pagesCaterpillarmeghatvNo ratings yet
- Material Mix Control PDFDocument5 pagesMaterial Mix Control PDFserkalemtNo ratings yet
- Hammer MillDocument8 pagesHammer MillMohamad Abdul RayaNo ratings yet
- Reducing Prehydration Article - C044 - Thomas Detellis PDFDocument6 pagesReducing Prehydration Article - C044 - Thomas Detellis PDFJohn GiannakopoulosNo ratings yet
- Case StudyDocument38 pagesCase Studyfitsum tesfaye0% (1)
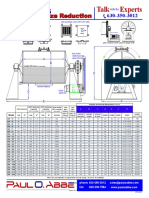
- Ball Mill Capacity Dimensions Paul o AbbeDocument2 pagesBall Mill Capacity Dimensions Paul o AbbeAnonymous QLRaOLNo ratings yet
- Combined Impact and Attrition MethodDocument7 pagesCombined Impact and Attrition MethodBernadette Beltran33% (3)
- SAPDocument78 pagesSAPSalman SaleemNo ratings yet
- ViewPageProof APT 2296Document10 pagesViewPageProof APT 2296Vasant HiremathNo ratings yet
- 20140324090225532ff4a1c4f18Document7 pages20140324090225532ff4a1c4f18MansarNo ratings yet
- PROCESS Description 2Document9 pagesPROCESS Description 2Nabeel SiddiqueNo ratings yet
- Training Report On Thermal Power Plant, Panki KanpurDocument30 pagesTraining Report On Thermal Power Plant, Panki Kanpurravi800150% (2)
- The Starkey Test Revisited Rev19 - Private - DistributionDocument19 pagesThe Starkey Test Revisited Rev19 - Private - DistributionCarlos Cjuno BustamanteNo ratings yet
- Cement Industry: Manufacturing Process of Portland Cement Raw MaterialsDocument11 pagesCement Industry: Manufacturing Process of Portland Cement Raw Materialsد.حاتممرقهNo ratings yet
- Reference List of Pape & Olbertz Schaltgeräte Und Widerstände GMBHDocument30 pagesReference List of Pape & Olbertz Schaltgeräte Und Widerstände GMBHAndre Juanda100% (1)
- Processing Options For Gold-TelluridesDocument8 pagesProcessing Options For Gold-TelluridesLuis Miguel La TorreNo ratings yet
- Tanzania Gold MinesDocument42 pagesTanzania Gold MinesEngineer Gilay Kilay Shamika100% (1)
- Mahindra Navistar Transportation ProjectDocument67 pagesMahindra Navistar Transportation ProjectRoshan Mondekar0% (1)
- Application of Electrical Drives in Cement Industry: Harshit Patel (171113021) 3 Year EEE Dept. Mobile No: +91 9131471858Document30 pagesApplication of Electrical Drives in Cement Industry: Harshit Patel (171113021) 3 Year EEE Dept. Mobile No: +91 9131471858harshit patel100% (1)
- Roller Mill Dolomit.: MDDP / MDDQDocument6 pagesRoller Mill Dolomit.: MDDP / MDDQEmanuel Mindinero100% (1)
- Second Year Chemical Engineering SyllabusDocument26 pagesSecond Year Chemical Engineering SyllabusSuchitra BandiNo ratings yet
- Process Mineralogical Investigations in Concentrator at Rampura AguchaDocument4 pagesProcess Mineralogical Investigations in Concentrator at Rampura AguchaminingnovaNo ratings yet
- Ballbal DirectDocument14 pagesBallbal DirectGonzalo LopezNo ratings yet
- Pocket Guide To Air Line DistributionDocument44 pagesPocket Guide To Air Line DistributionMarcos Aldana Villalda100% (2)
- New Entry November - December - 2014Document43 pagesNew Entry November - December - 2014Mooeez BellaamineNo ratings yet