Download as pdf or txt
You might also like
- Retie - English 2008-FinalDocument168 pagesRetie - English 2008-FinalJuan David SanchezNo ratings yet
- Performance Enhancement of Grid Connected Wind Energy Conversion SystemsDocument6 pagesPerformance Enhancement of Grid Connected Wind Energy Conversion Systemskanda71No ratings yet
- Cardenas (2001)Document11 pagesCardenas (2001)jhonatanNo ratings yet
- Synchronization of Asynchronous Wind Turbines: IEEE Power Engineering Review June 2002Document9 pagesSynchronization of Asynchronous Wind Turbines: IEEE Power Engineering Review June 2002Ersi AgoNo ratings yet
- Variable Speed Drive Modelling of Wind Turbine Permanent Magnet Synchronous GeneratorDocument6 pagesVariable Speed Drive Modelling of Wind Turbine Permanent Magnet Synchronous GeneratorMichael SaandNo ratings yet
- Dynamical Sliding Mode Power Control of Wind Driven Induction GeneratorsDocument7 pagesDynamical Sliding Mode Power Control of Wind Driven Induction GeneratorsRiad ToufoutiNo ratings yet
- Analysis of Thyristor Controlled Induction Motors Based VVCFDocument4 pagesAnalysis of Thyristor Controlled Induction Motors Based VVCFDipti NagareNo ratings yet
- Harmonic Analysis of DFIG Wind TurbineDocument11 pagesHarmonic Analysis of DFIG Wind TurbineInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Wind Generation SystemDocument9 pagesWind Generation SystemShreya BagariaNo ratings yet
- Modeling Wind Turbines in Power System Dynamics Simulations: February 2001Document6 pagesModeling Wind Turbines in Power System Dynamics Simulations: February 2001EdgardoKatReyesNo ratings yet
- Mitigation of Sub Synchronous Oscillations in ADocument7 pagesMitigation of Sub Synchronous Oscillations in ARamesh GosuNo ratings yet
- Aggregated Wind Park Models For Analyzing Power System DynamicsDocument10 pagesAggregated Wind Park Models For Analyzing Power System Dynamicsmohamed faisalNo ratings yet
- Variable-Speed Wind Power Generation UsingDocument8 pagesVariable-Speed Wind Power Generation Usingsrinu240000100% (1)
- Synchronous Inertia Control For Wind TurbinesDocument8 pagesSynchronous Inertia Control For Wind TurbinesStefania OliveiraNo ratings yet
- Wind Turbine Using Doubly Fed Induction Generator Systems For Wind TurbinesDocument3 pagesWind Turbine Using Doubly Fed Induction Generator Systems For Wind Turbinesanil kasotNo ratings yet
- Stator Field Oriented Control of Doubly-Excited Induction Machine in Wind Power Generating SystemDocument4 pagesStator Field Oriented Control of Doubly-Excited Induction Machine in Wind Power Generating Systemvenktesh22No ratings yet
- 291 GarciaDocument6 pages291 GarciaRizkiNo ratings yet
- CP 2011 0188Document6 pagesCP 2011 0188ALI BOUKHRISSNo ratings yet
- Automatically Regulated C.V.T. in Wind PDFDocument12 pagesAutomatically Regulated C.V.T. in Wind PDFمهيمن فالح حمدNo ratings yet
- Power Converter Control Circuits For Two-Mass Vibratory Conveying System With Electromagnetic DriveDocument15 pagesPower Converter Control Circuits For Two-Mass Vibratory Conveying System With Electromagnetic DrivemNo ratings yet
- Investigation of Wind Farm On Power System Voltage Stability Based On Bifurcation TheoryDocument4 pagesInvestigation of Wind Farm On Power System Voltage Stability Based On Bifurcation TheoryArmando MaloneNo ratings yet
- Linear PM Generator System For Wave Energy Conversion in The AWSDocument7 pagesLinear PM Generator System For Wave Energy Conversion in The AWSعبدالله نعمان آلزبيديNo ratings yet
- Fuzzy Logic Control of Matrix-Converter-Based WECS in Order To Performance ImprovementDocument6 pagesFuzzy Logic Control of Matrix-Converter-Based WECS in Order To Performance ImprovementChetan GhatageNo ratings yet
- Modelling and Simulation of Tidal Current Turbine With Permanent Magnet Synchronous GeneratorDocument9 pagesModelling and Simulation of Tidal Current Turbine With Permanent Magnet Synchronous GeneratorIgnaceRakotozandryNo ratings yet
- Wind Turbine Modelling 1Document8 pagesWind Turbine Modelling 1Reda AlHamwiNo ratings yet
- Subsynchronous Resonance AnalysisDocument4 pagesSubsynchronous Resonance AnalysisijaertNo ratings yet
- Fixed-Speed Wind-Generator and Wind-Park Modeling For Transient Stability StudiesDocument7 pagesFixed-Speed Wind-Generator and Wind-Park Modeling For Transient Stability StudiesVenkatesh KollisettiNo ratings yet
- 5 Modeling and Control of Variable Speed Wind Turbine Drive System DynamicsDocument11 pages5 Modeling and Control of Variable Speed Wind Turbine Drive System DynamicsnguyenngocbanNo ratings yet
- 2011 Khameneifar2011Document6 pages2011 Khameneifar2011NameNo ratings yet
- General Diesel Turbines: A Algorithm AccurateDocument7 pagesGeneral Diesel Turbines: A Algorithm AccurateMelissa HolmesNo ratings yet
- Resposta de Inércia de Geradores Eólicos de Ímã Permanente Baseados em Conversor de Potência TotalDocument8 pagesResposta de Inércia de Geradores Eólicos de Ímã Permanente Baseados em Conversor de Potência TotalDaniel reisNo ratings yet
- Subsynchronous Resonance Analysis: Types OF SSR InteractionDocument4 pagesSubsynchronous Resonance Analysis: Types OF SSR InteractionBhavik PrajapatiNo ratings yet
- Maximization of Power For Wind Energy ProductionDocument6 pagesMaximization of Power For Wind Energy ProductionInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Energies 12 01907Document25 pagesEnergies 12 01907Sesetti GourisankarNo ratings yet
- 63 554173 PDFDocument9 pages63 554173 PDFCastañeda ValeriaNo ratings yet
- Renewable EnergyDocument9 pagesRenewable EnergyMahmoud Jaber Al-KiswaniNo ratings yet
- Wells Turbine For Wave Energy ConversionDocument7 pagesWells Turbine For Wave Energy ConversionAa AnimationsNo ratings yet
- Tip Speed Ratio Control of A 200 KW VAWT With Synchronous Generator and Variable DC VoltageDocument9 pagesTip Speed Ratio Control of A 200 KW VAWT With Synchronous Generator and Variable DC VoltageWinggi ArafanaldyNo ratings yet
- Slootweg2 Pessm 01 PDFDocument6 pagesSlootweg2 Pessm 01 PDFStefania OliveiraNo ratings yet
- Chapters 3Document54 pagesChapters 3Jspmani2040No ratings yet
- Analysis of The Dynamics of A Wind-Turbine Water-Pumping SystemDocument14 pagesAnalysis of The Dynamics of A Wind-Turbine Water-Pumping SystemRiad TifaNo ratings yet
- Voltage Regulation of Variable Speed Wind Turbine Using MATLAB/SimulinkDocument4 pagesVoltage Regulation of Variable Speed Wind Turbine Using MATLAB/SimulinkArshad Nawaz KhattakNo ratings yet
- 4.simulation An Asynchronous Generator and PGS Modeling Use RLCs by ConvertersDocument4 pages4.simulation An Asynchronous Generator and PGS Modeling Use RLCs by Converterssamikshyadas415No ratings yet
- Aees P4Document5 pagesAees P4Profil FaksNo ratings yet
- Zhang - 2017 - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 199 - 012124Document7 pagesZhang - 2017 - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 199 - 012124reachyourdreams30No ratings yet
- Design and Implementation of Power Electronic Converters in Wind Turbine SystemDocument8 pagesDesign and Implementation of Power Electronic Converters in Wind Turbine Systembhawna guptaNo ratings yet
- Self Tuning Control of Wind Turbine Using Neural Network IdentifierDocument13 pagesSelf Tuning Control of Wind Turbine Using Neural Network IdentifierAlla SapronovaNo ratings yet
- Research On Flywheel Energy Storage System For Power QualityDocument4 pagesResearch On Flywheel Energy Storage System For Power Qualitymuhamad otongNo ratings yet
- Vector Controlled Induction Machines For Stand-Alone Wind Energy ApplicationsDocument8 pagesVector Controlled Induction Machines For Stand-Alone Wind Energy Applicationssatyam swarup dubeyNo ratings yet
- Adjustable Speed Constant Frequency Energy Generation With Doubly-Fed Induction MachinesDocument7 pagesAdjustable Speed Constant Frequency Energy Generation With Doubly-Fed Induction MachinesGennaroNo ratings yet
- Kou, Klein, Beckman - 1998 - A Method For Estimating The Long-Term Performance of Direct-Coupled PV Pumping SystemsDocument8 pagesKou, Klein, Beckman - 1998 - A Method For Estimating The Long-Term Performance of Direct-Coupled PV Pumping SystemsMohd Faisal JalilNo ratings yet
- 2011 Current Contributions From Type 3 and Type 4 Wind Turbine Generators During FaultsDocument6 pages2011 Current Contributions From Type 3 and Type 4 Wind Turbine Generators During FaultsAbhishekAnandNo ratings yet
- A Novel Method of Frequency Regulation in MicrogridDocument11 pagesA Novel Method of Frequency Regulation in MicrogridAayesha AhmedNo ratings yet
- MEDPOWER2010 Paper 150Document6 pagesMEDPOWER2010 Paper 150rao saniNo ratings yet
- MEDPOWER2010 Paper 150 PDFDocument6 pagesMEDPOWER2010 Paper 150 PDFrao saniNo ratings yet
- Renewable Energy: M. Jafarian, A.M. RanjbarDocument6 pagesRenewable Energy: M. Jafarian, A.M. RanjbarsalmanassriNo ratings yet
- Analytical ModelDocument10 pagesAnalytical ModelMicky ArthurNo ratings yet
- Back-To-Back Converter Design and Control For Synchronous Generator-Based Wind TurbinesDocument8 pagesBack-To-Back Converter Design and Control For Synchronous Generator-Based Wind TurbinesBinh NgoNo ratings yet
- Power System Stabilization by Synchronous Condenser With Excitation ControlDocument6 pagesPower System Stabilization by Synchronous Condenser With Excitation ControlLuc JeanNo ratings yet
- Design and Implementation of Matrix Converter To Reduce The Effects of Wind Speed Fluctuations in PMSG Wind Turbine Generation SystemDocument4 pagesDesign and Implementation of Matrix Converter To Reduce The Effects of Wind Speed Fluctuations in PMSG Wind Turbine Generation SystemChetan GhatageNo ratings yet
- Research Online Research OnlineDocument63 pagesResearch Online Research OnlineEngrImranKhanNo ratings yet
- Dynamic Modelling of A Wind FarmDocument21 pagesDynamic Modelling of A Wind FarmEngrImranKhanNo ratings yet
- Dynamic Modelling and Control Design ofDocument45 pagesDynamic Modelling and Control Design ofEngrImranKhanNo ratings yet
- 2-Stability and Reliability Improvement in Solar Wind Hybrid Power System With Battery Energy Storage StationDocument9 pages2-Stability and Reliability Improvement in Solar Wind Hybrid Power System With Battery Energy Storage StationEngrImranKhanNo ratings yet
- Excitation of Isolated Three-Phase Induction Generator by A Single CapacitorDocument7 pagesExcitation of Isolated Three-Phase Induction Generator by A Single CapacitorEngrImranKhanNo ratings yet
- Problem 04 - Bernoulli's Energy Theorem - Advance Engineering Mathematics ReviewDocument1 pageProblem 04 - Bernoulli's Energy Theorem - Advance Engineering Mathematics ReviewimrancenakkNo ratings yet
- Geometri Analitik - Latihan Chapter 1.3Document5 pagesGeometri Analitik - Latihan Chapter 1.3Fiki Nafilah HusnaNo ratings yet
- WO 2008/103130 Al: International BureauDocument12 pagesWO 2008/103130 Al: International BureauGanar QuinielaNo ratings yet
- Rocket Vehicle Loads and Airframe DesignDocument27 pagesRocket Vehicle Loads and Airframe DesignNigel MutambanengweNo ratings yet
- Properties of Hard Concrete PresentationDocument17 pagesProperties of Hard Concrete PresentationKannan KandappanNo ratings yet
- Partial DischargeDocument11 pagesPartial DischargeDavid_Allen_007100% (1)
- Review of The Literature On The Use of Rice Husk Ash As A Sustainable Filler Substitute in Hot Rubber Asphalt Mixtures For Road Pavements' Wearing CourseDocument7 pagesReview of The Literature On The Use of Rice Husk Ash As A Sustainable Filler Substitute in Hot Rubber Asphalt Mixtures For Road Pavements' Wearing Coursekiwaallan3No ratings yet
- ME 118 Material Science Finals BAUTISTA BSME3BDocument2 pagesME 118 Material Science Finals BAUTISTA BSME3Bjethro ganeloNo ratings yet
- MST185 Manual SMLDocument44 pagesMST185 Manual SMLGreg MeyerNo ratings yet
- Sabik Marine-Datasheet m660 2020Document2 pagesSabik Marine-Datasheet m660 2020purchasingNo ratings yet
- Transformer ProtectionDocument27 pagesTransformer ProtectionYogesh Mittal100% (2)
- 16 Faraday's Law of InductionDocument11 pages16 Faraday's Law of InductionRose Eden CantoNo ratings yet
- Measuring Ultrashort Laser Pulses I: Autocorrelation: 1D Phase RetrievalDocument42 pagesMeasuring Ultrashort Laser Pulses I: Autocorrelation: 1D Phase RetrievalNadia Al-RoshdeeNo ratings yet
- LCR MeterDocument2 pagesLCR Meterhungphuc2010No ratings yet
- Mathematical - Modeling - For - Integrated - Three-Phase - C (Matlab-Simulink)Document13 pagesMathematical - Modeling - For - Integrated - Three-Phase - C (Matlab-Simulink)Luis ZapataNo ratings yet
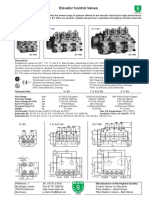
- Elevator Control Valves: EN ISO 9001Document6 pagesElevator Control Valves: EN ISO 9001Jibjab7No ratings yet
- Well Integrity Logs: Downhole Casing InspectionDocument10 pagesWell Integrity Logs: Downhole Casing InspectionAG YNo ratings yet
- Connection Design ManualDocument34 pagesConnection Design ManualAlaa AssiNo ratings yet
- Latihan 1: (Konsep Belajar TOEFL Dari NOL)Document8 pagesLatihan 1: (Konsep Belajar TOEFL Dari NOL)Widya TriwulanNo ratings yet
- HiggsDocument31 pagesHiggsJacques SmeetsNo ratings yet
- Installation and Operating Instruction: Gas Burner WG10 /1-D ZM-LNDocument112 pagesInstallation and Operating Instruction: Gas Burner WG10 /1-D ZM-LNdarrel gimoteaNo ratings yet
- Dos 1-Lec 2 Properties of Concrete and SteelDocument48 pagesDos 1-Lec 2 Properties of Concrete and SteelPrasoon Prasenan PNo ratings yet
- Circuit Construction: Assignment 3Document45 pagesCircuit Construction: Assignment 3ali morisyNo ratings yet
- New RVRDocument22 pagesNew RVRakshithaNo ratings yet
- NFPA 77 Tabla Energía de Ignición MínimaDocument2 pagesNFPA 77 Tabla Energía de Ignición Mínimajoako1156No ratings yet
- Multistage Coil GunDocument29 pagesMultistage Coil GunlykaonasNo ratings yet
- Mt105a 2023 Pass Paper No TipsDocument5 pagesMt105a 2023 Pass Paper No Tipslosika.mosupiNo ratings yet
- Ultramax DatasheetDocument2 pagesUltramax DatasheetMehmet ÇakırNo ratings yet
- Parts Catalog: Ir C3200 SeriesDocument178 pagesParts Catalog: Ir C3200 SeriesЕвгений100% (1)