Download as pdf or txt
You might also like
- Bayesian Network Based Energy Efficient Ship Motion MonitoringDocument17 pagesBayesian Network Based Energy Efficient Ship Motion MonitoringNurAmeliaMaulidiaNo ratings yet
- Bubble WakeDocument6 pagesBubble WakehelloyvnNo ratings yet
- Development of Usv Autonomy: Architecture, Implementation and Sea TrialsDocument19 pagesDevelopment of Usv Autonomy: Architecture, Implementation and Sea TrialsMara Rebeka HerzogNo ratings yet
- Further Developments of Multi-Purpose Underwater Data Collection Devices Deployed With ROVDocument6 pagesFurther Developments of Multi-Purpose Underwater Data Collection Devices Deployed With ROVmccatysNo ratings yet
- KR JR Ac CNN Ship Type Spie 2016Document12 pagesKR JR Ac CNN Ship Type Spie 2016Sun TheNo ratings yet
- Tech Paper - Edit - F - 1Document15 pagesTech Paper - Edit - F - 1sunil kumarNo ratings yet
- Learn Temp Features MaritimeDocument14 pagesLearn Temp Features MaritimeTiago RibeiroNo ratings yet
- Skymed Merchant VesselDocument5 pagesSkymed Merchant VesselLeoNo ratings yet
- Detection of Ships Moving in A Straight Lin - 2022 - International Journal of NaDocument9 pagesDetection of Ships Moving in A Straight Lin - 2022 - International Journal of NaNguyen Phuc LinhNo ratings yet
- Don't Give Up On The ShipDocument7 pagesDon't Give Up On The ShipWilliam O'NeilNo ratings yet
- The Role of Navigational Aids Such As Radar-ARPA, ECDIS, AIS, Autopilot, On Safe Navigation at SeaDocument3 pagesThe Role of Navigational Aids Such As Radar-ARPA, ECDIS, AIS, Autopilot, On Safe Navigation at SeasergiuserbanNo ratings yet
- Dark Activity Detection in AIS-Based Maritime NetworksDocument6 pagesDark Activity Detection in AIS-Based Maritime Networkskeshavarz.shirazu.ac.irNo ratings yet
- Ship Dynamics For Maritime ISAR Imaging: Sandia ReportDocument32 pagesShip Dynamics For Maritime ISAR Imaging: Sandia Reportsandia_docsNo ratings yet
- Contour Based Reconstruction of Underwater Structures Using Sonar Visual Inertial and Depth SensorDocument6 pagesContour Based Reconstruction of Underwater Structures Using Sonar Visual Inertial and Depth SensorGuilherme OliveiraNo ratings yet
- Collision Avoidance For Vessels Using A Low-Cost Radar SensorDocument6 pagesCollision Avoidance For Vessels Using A Low-Cost Radar SensorPraying BumbleeNo ratings yet
- Basin-Wide Maritime Awareness From Multi-Source Ship Reporting DataDocument9 pagesBasin-Wide Maritime Awareness From Multi-Source Ship Reporting DataTÜLAY ÇOKACARNo ratings yet
- Avalon Satellite System: Singapore Space Challenge 2009Document24 pagesAvalon Satellite System: Singapore Space Challenge 2009vijay120No ratings yet
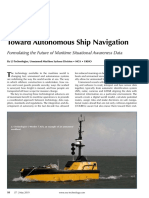
- Toward Autonomous Ship Navigation: Formulating The Future of Maritime Situational Awareness DataDocument5 pagesToward Autonomous Ship Navigation: Formulating The Future of Maritime Situational Awareness DataFlores JohanNo ratings yet
- A Review On Unmanned Surface Vehicles DevelopmentDocument8 pagesA Review On Unmanned Surface Vehicles Developmentwwt1135172086No ratings yet
- Remotesensing 13 03066 v2Document13 pagesRemotesensing 13 03066 v2Kamel MohammedNo ratings yet
- C-SIGMA Article March-April 2011Document4 pagesC-SIGMA Article March-April 2011timh1123No ratings yet
- LoilincolnlabDocument2 pagesLoilincolnlabapi-264154540No ratings yet
- Chapter 3Document16 pagesChapter 3Rameez AliNo ratings yet
- 17 102 GrayDocument18 pages17 102 GrayBasem MohamedNo ratings yet
- (Detectron2) Application of Convolutional Neural Network (CNN) To Recognize Ship StructuresDocument16 pages(Detectron2) Application of Convolutional Neural Network (CNN) To Recognize Ship Structuresbryansantoso8585No ratings yet
- Development of An Artificial Vision System For Underwater VehiclesDocument3 pagesDevelopment of An Artificial Vision System For Underwater Vehicleslox agencyNo ratings yet
- Submarines To Cast Off Their Shackles, Take On New Roles: International Defense Review - March 01, 2002Document24 pagesSubmarines To Cast Off Their Shackles, Take On New Roles: International Defense Review - March 01, 2002mrblaze2000No ratings yet
- BMTDSL Designing SSKs Vidar Confpaper UDTPacific Oct08Document17 pagesBMTDSL Designing SSKs Vidar Confpaper UDTPacific Oct08DUNCAN0420No ratings yet
- Convolutional Neural Network (CNN) Applied To The Risk Analysis of Accidents in Vessels Navigating The Amazon RiversDocument11 pagesConvolutional Neural Network (CNN) Applied To The Risk Analysis of Accidents in Vessels Navigating The Amazon RiversIJAERS JOURNALNo ratings yet
- Review of Autonomous and Remotely Controlled Ships in Maritime SectorDocument13 pagesReview of Autonomous and Remotely Controlled Ships in Maritime Sectorhideki hidekiNo ratings yet
- Unmanned Underwater Vehicles The Future PDFDocument15 pagesUnmanned Underwater Vehicles The Future PDFPavan KumarNo ratings yet
- Mitwr 11010Document9 pagesMitwr 11010Sunil Kumar P GNo ratings yet
- Mecanização e Ou Robotização para Preparo e Inspeção Da Superfície para PinturaDocument8 pagesMecanização e Ou Robotização para Preparo e Inspeção Da Superfície para PinturaBrigida Bastos De AlmeidaNo ratings yet
- Carolyn L. Ramsey, Paul A. Griffiths & Timothy R. Stokes: PovzetekDocument18 pagesCarolyn L. Ramsey, Paul A. Griffiths & Timothy R. Stokes: PovzetekcareerNo ratings yet
- Autonomous Underwater VehicleDocument5 pagesAutonomous Underwater VehicleBiswajit PadhiNo ratings yet
- The Autonomous Underwater Vehicle (AUV) : A Cost-Effective Alternative To Deep-Towed TechnologyDocument5 pagesThe Autonomous Underwater Vehicle (AUV) : A Cost-Effective Alternative To Deep-Towed Technologyaarthi devNo ratings yet
- Autonomous Underwater VehicleDocument6 pagesAutonomous Underwater VehicleKiran Kumar50% (2)
- Uwsn Milcom 2005 PDFDocument7 pagesUwsn Milcom 2005 PDFamit guptaNo ratings yet
- Identifying and Analyzing Safety Critical Maneuvers From High Resolution AIS DataDocument9 pagesIdentifying and Analyzing Safety Critical Maneuvers From High Resolution AIS DataFrancisco PintoNo ratings yet
- SSRN Id2178084Document11 pagesSSRN Id2178084Binit KumarNo ratings yet
- Unmanned Aircraft System For Maritime Operations Automatic Detection SubsystemDocument12 pagesUnmanned Aircraft System For Maritime Operations Automatic Detection SubsystemEduardo RodriguesNo ratings yet
- Trends and Challenges in Unmanned Surface Vehicles (USV) - From Survey To ShippingDocument8 pagesTrends and Challenges in Unmanned Surface Vehicles (USV) - From Survey To ShippingVORTICE ENGINEERING AND CONSTRUCTIONNo ratings yet
- Autonomous Guidance and Navigation Based On The COLREGs Rules and Regulations of Collision AvoidanceDocument13 pagesAutonomous Guidance and Navigation Based On The COLREGs Rules and Regulations of Collision AvoidanceAdrian IonutNo ratings yet
- Underwater Gliders For Ocean Research: PaperDocument12 pagesUnderwater Gliders For Ocean Research: PapermashdakbarNo ratings yet
- Jmse 11 00961 With CoverDocument17 pagesJmse 11 00961 With Covernnouraa178No ratings yet
- Cent Rode MasaDocument11 pagesCent Rode Masamarcelo carroNo ratings yet
- Design and Control of An Unmanned Surface Vehicle For Environmental Monitoring ApplicationsDocument5 pagesDesign and Control of An Unmanned Surface Vehicle For Environmental Monitoring ApplicationsJheifer PaezNo ratings yet
- UUV Final Primer FormattedDocument8 pagesUUV Final Primer FormattedJay ZNo ratings yet
- VLCC - Maneuvering TrialsDocument33 pagesVLCC - Maneuvering TrialsAnonymous UCveMQNo ratings yet
- Autonomous Underwater VehicleDocument9 pagesAutonomous Underwater VehicleManas BajpaiNo ratings yet
- Presented by Imtiaz Ahmed KhanDocument37 pagesPresented by Imtiaz Ahmed KhanImtiaz Ahmed KhanNo ratings yet
- Driscoll 2000Document14 pagesDriscoll 2000Soledad AceitunoNo ratings yet
- Feasibility Study Example 16Document4 pagesFeasibility Study Example 16Diana CojocariNo ratings yet
- Development of An Autonomous Surface Vehicle and Performance Evalu-Ation of Autonomous Navigation TechnologiesDocument11 pagesDevelopment of An Autonomous Surface Vehicle and Performance Evalu-Ation of Autonomous Navigation TechnologiesLUIS ALBERTO SALAZAR CHAVEZNo ratings yet
- Stoploss 74Document4 pagesStoploss 74MuhammadNo ratings yet
- 1 s2.0 S0034425717306193 MainDocument26 pages1 s2.0 S0034425717306193 MainLeoNo ratings yet
- Cmre PR 2017 006Document10 pagesCmre PR 2017 006Sébastien PennecNo ratings yet
- Concept Design of Satellite Communications System For Next Generation Marine Observation - Broadband IP Network Down To UnderwaterDocument7 pagesConcept Design of Satellite Communications System For Next Generation Marine Observation - Broadband IP Network Down To UnderwaterRaj KannanNo ratings yet
- Sea Keeping Analysis For Preliminary DesignDocument10 pagesSea Keeping Analysis For Preliminary DesignTullio OpattiNo ratings yet
- Autonomous Underwater Vehicle: Stealth Technology and Tactical Advancements in Modern Naval WarfareFrom EverandAutonomous Underwater Vehicle: Stealth Technology and Tactical Advancements in Modern Naval WarfareNo ratings yet
- BIM Execution Plan BEP BXP 1702395762Document40 pagesBIM Execution Plan BEP BXP 1702395762Tuyen TranNo ratings yet
- Fault Code: 132 Accelerator Position Sensor: CELECT™-Type Accelerator Pedal or LeverDocument2 pagesFault Code: 132 Accelerator Position Sensor: CELECT™-Type Accelerator Pedal or LeverDung PhamNo ratings yet
- FFFFDocument1 pageFFFFYanetNo ratings yet
- Accessdata FTK Quick Installation Guide: PrerequisitesDocument15 pagesAccessdata FTK Quick Installation Guide: Prerequisitesrizal alghozaliNo ratings yet
- MIDAS Meter Flyer - WebDocument2 pagesMIDAS Meter Flyer - WebMuhammad Fahmmi Bin MahmudNo ratings yet
- Verification of Dual Port RAM Using System Verilog and UVM: A ReviewDocument6 pagesVerification of Dual Port RAM Using System Verilog and UVM: A ReviewIJRASETPublicationsNo ratings yet
- Blockchain Notes.Document8 pagesBlockchain Notes.Hussein IbrahimNo ratings yet
- DC7xD Series Configuration and Instructions V1.3-180630Document17 pagesDC7xD Series Configuration and Instructions V1.3-180630Osama NadeemNo ratings yet
- Architecture Model of Information Technology Infrastructure Based On Service Quality at Government InstitutionDocument10 pagesArchitecture Model of Information Technology Infrastructure Based On Service Quality at Government InstitutionfranciscoNo ratings yet
- Tle-Lesson 3Document33 pagesTle-Lesson 3Sophrina Jazmynrose CruzNo ratings yet
- Bulletin: PULSE Order AnalysisDocument1 pageBulletin: PULSE Order AnalysisBrianna Daniela VARGAS MERMANo ratings yet
- Lab Course File EC 601 DSPDocument17 pagesLab Course File EC 601 DSPPrachi ParasharNo ratings yet
- The Knowledge Vehicle (K-Yan) :: Sustainable Value Creation by DesignDocument21 pagesThe Knowledge Vehicle (K-Yan) :: Sustainable Value Creation by DesignATIUHS KTSNo ratings yet
- Gmail Quick Reference EvalDocument3 pagesGmail Quick Reference EvalsavannaheyzNo ratings yet
- The Core Competence of The CorporationDocument22 pagesThe Core Competence of The CorporationHabtamu GedefawNo ratings yet
- Looking For Real Exam Questions For IT Certification Exams!Document6 pagesLooking For Real Exam Questions For IT Certification Exams!shenoda awNo ratings yet
- Cs61b Homework 1Document7 pagesCs61b Homework 1qbbddoilf100% (1)
- Comandos B2Document3 pagesComandos B2Aurélio FariaNo ratings yet
- DS-NG-6460-002-003 Function Check of All SAS Peripheral Devices Test FormatsDocument3 pagesDS-NG-6460-002-003 Function Check of All SAS Peripheral Devices Test FormatsAhmed RyiadNo ratings yet
- SANY SY80C-9, Excellent Performance With Superior QualityDocument6 pagesSANY SY80C-9, Excellent Performance With Superior QualityANANTH JNo ratings yet
- A Seminar Report On: Cloud Computing With AmazonDocument33 pagesA Seminar Report On: Cloud Computing With Amazonsarayu_sree2No ratings yet
- Thermoelectric RefrigerationDocument30 pagesThermoelectric RefrigerationGideon Uchehara100% (2)
- Brightsign QuickStart GuideDocument5 pagesBrightsign QuickStart GuideHell GirlNo ratings yet
- Notes On Micro Controller and Digital Signal ProcessingDocument70 pagesNotes On Micro Controller and Digital Signal ProcessingDibyajyoti BiswasNo ratings yet
- PrinteriDocument8 pagesPrinteriBelmin DinarNo ratings yet
- Application SoftwareDocument33 pagesApplication SoftwareJowel VistaNo ratings yet
- Ethics On Ethical Hacking: BY: - ) Prakhar Rastogi 9018057699Document10 pagesEthics On Ethical Hacking: BY: - ) Prakhar Rastogi 9018057699Prakhar RastogiNo ratings yet
- Damencnc Damencnc: Manual: Torque Mode Asda-B2Document26 pagesDamencnc Damencnc: Manual: Torque Mode Asda-B2BrunoRC7No ratings yet
- DP Maintenance CourseDocument16 pagesDP Maintenance CourseAndrei ZambalicNo ratings yet
- ECE 252 - Quiz - 1 - SolutionsDocument5 pagesECE 252 - Quiz - 1 - SolutionsAbdullah HossainNo ratings yet