Download as pdf or txt
You might also like
- The Integration of Process Design and ControlDocument656 pagesThe Integration of Process Design and Controlsheida shNo ratings yet
- Native Speaker DictionaryDocument15 pagesNative Speaker DictionaryMustafa Kemal AmbarNo ratings yet
- Paper WikiFish28augustFinalDocument7 pagesPaper WikiFish28augustFinalMariana Dominguez AlvesNo ratings yet
- Fauna Image ClasificationDocument10 pagesFauna Image Clasificationanggun.pambudiNo ratings yet
- Huang 2019Document13 pagesHuang 2019ilkom.uhoNo ratings yet
- Machine Learning Methods For Classification of The Green Infrastructure in City AreasDocument10 pagesMachine Learning Methods For Classification of The Green Infrastructure in City AreasSarah HannahNo ratings yet
- A Survey On Pest Detectionand Pesticide Recommendationusing CNN AlgorithmDocument5 pagesA Survey On Pest Detectionand Pesticide Recommendationusing CNN AlgorithmIJRASETPublicationsNo ratings yet
- Image RetrivalDocument7 pagesImage Retrivalbvkarthik2711No ratings yet
- A Deep Learning Approach To Detecting Objects in Underwater ImagesDocument16 pagesA Deep Learning Approach To Detecting Objects in Underwater ImagesJohn AsmaraNo ratings yet
- An Open-Source Platform For Underwater Image and Video AnalyticsDocument10 pagesAn Open-Source Platform For Underwater Image and Video AnalyticsvijayforrockNo ratings yet
- EJRSDocument11 pagesEJRSYa SaranNo ratings yet
- Colloid Transport Prediction Using SVM-MLPDocument5 pagesColloid Transport Prediction Using SVM-MLPInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Drowning Detection System Using LRCN ApproachDocument8 pagesDrowning Detection System Using LRCN ApproachIJRASETPublicationsNo ratings yet
- Rajeev Insttitute of Technology: Dept. of Electronics & Communication EngineeringDocument19 pagesRajeev Insttitute of Technology: Dept. of Electronics & Communication EngineeringSharadhiNo ratings yet
- A Survey On Visual Analysis of Ocean DataDocument16 pagesA Survey On Visual Analysis of Ocean DataAnu ParameswaranNo ratings yet
- Call For Research Papers 2014 IndiaDocument4 pagesCall For Research Papers 2014 Indiagz8reqdc100% (1)
- Iccter - 2014Document299 pagesIccter - 2014iaetsdiaetsdNo ratings yet
- Sci Applied Physics Nanotechnology Honours Projects2021 V2Document18 pagesSci Applied Physics Nanotechnology Honours Projects2021 V2Juventie PrimastutiNo ratings yet
- Literature Survey of Plant Disease Detection Using CNNDocument6 pagesLiterature Survey of Plant Disease Detection Using CNNIJRASETPublicationsNo ratings yet
- Ijatcse 33942020Document8 pagesIjatcse 33942020giovana.rodriguez.6104No ratings yet
- Underwater Fish Detection and Counting Using Mask Regional Convolutional Neural Network 2022Document23 pagesUnderwater Fish Detection and Counting Using Mask Regional Convolutional Neural Network 2022p.viaaNo ratings yet
- Fast and Effective Root Cause Analysis of Streaming Data Using In-Memory Processing TechniquesDocument9 pagesFast and Effective Root Cause Analysis of Streaming Data Using In-Memory Processing Techniquesdragonic77No ratings yet
- Skin Cancer Detection With The Aid of Deep LearningDocument7 pagesSkin Cancer Detection With The Aid of Deep LearningIJRASETPublicationsNo ratings yet
- Whale & Dolphin Species Detection Using Hybrid Efficient Net ArchitectureDocument7 pagesWhale & Dolphin Species Detection Using Hybrid Efficient Net ArchitectureIJRASETPublicationsNo ratings yet
- A Review On State-Of-The-Art Applications of Data-Driven Methods in Desalination SystemsDocument35 pagesA Review On State-Of-The-Art Applications of Data-Driven Methods in Desalination SystemsraghdakhaterNo ratings yet
- Event Based Imaging Using Neural NetworksDocument6 pagesEvent Based Imaging Using Neural NetworksInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Iris Recognition Research PapersDocument5 pagesIris Recognition Research Papersgw2cgcd9100% (1)
- Matrial Today - Raffic - S2.0-S2214785321034969-MainDocument5 pagesMatrial Today - Raffic - S2.0-S2214785321034969-MainSivakumar muthuNo ratings yet
- Report ANNDocument43 pagesReport ANNvishal singhNo ratings yet
- A Study of Deep Learning ApplicationsDocument3 pagesA Study of Deep Learning ApplicationsEditor IJTSRDNo ratings yet
- Recognition and Classification of Diabetic Retinopathy Using Retinal Fundus ImagesDocument7 pagesRecognition and Classification of Diabetic Retinopathy Using Retinal Fundus ImagesIJRASETPublicationsNo ratings yet
- Seminar Presentation ExamDocument21 pagesSeminar Presentation ExamGamerzz FactoryNo ratings yet
- T Computing in Petroleum EngineeringDocument4 pagesT Computing in Petroleum EngineeringNickolas Anthony Gomez FuentesNo ratings yet
- Research On Abnormal Object Detection in SpecificDocument9 pagesResearch On Abnormal Object Detection in SpecificTrivedi RajendraNo ratings yet
- Document 39Document7 pagesDocument 39Harsh ModiNo ratings yet
- SIDDHARTH SHARMA - FinalProjectReport - SiddharthDocument27 pagesSIDDHARTH SHARMA - FinalProjectReport - Siddharthken continNo ratings yet
- UG ResearchDocument7 pagesUG ResearchRYUK -No ratings yet
- Performance of Hasty and Consistent Multi Spectral Iris Segmentation Using Deep LearningDocument5 pagesPerformance of Hasty and Consistent Multi Spectral Iris Segmentation Using Deep LearningEditor IJTSRDNo ratings yet
- PhotogrammetryDocument21 pagesPhotogrammetrynurnazuraabdrazak97No ratings yet
- Digital Watermarking Using Machine LearningDocument7 pagesDigital Watermarking Using Machine LearningIJRASETPublicationsNo ratings yet
- Artificial Neural Networks and Machine Learning Techniques AppliedDocument7 pagesArtificial Neural Networks and Machine Learning Techniques AppliedBambangSuryaPratamaNo ratings yet
- Plagiarism Scan Report: Plagiarism Unique Plagiarized Sentences Unique Sentences Content Checked For PlagiarismDocument2 pagesPlagiarism Scan Report: Plagiarism Unique Plagiarized Sentences Unique Sentences Content Checked For PlagiarismArsh SyedNo ratings yet
- Optimizing CNNs For Contactless Palmprint RecognitionDocument9 pagesOptimizing CNNs For Contactless Palmprint Recognitiondipesh.sNo ratings yet
- Wild Animal Detection Using Deep Convolutional Neural NetworkDocument13 pagesWild Animal Detection Using Deep Convolutional Neural NetworkGhazal BilalNo ratings yet
- Faia 347 Faia220009Document10 pagesFaia 347 Faia220009vuplmhe180526No ratings yet
- A Survey On Multiclass Image Classification Based On Inception-V3 Transfer Learning ModelDocument6 pagesA Survey On Multiclass Image Classification Based On Inception-V3 Transfer Learning ModelIJRASETPublicationsNo ratings yet
- A Survey of Convolutional Neural Network Architectures For Deep Learning Via Health ImagesDocument4 pagesA Survey of Convolutional Neural Network Architectures For Deep Learning Via Health ImagesEditor IJTSRDNo ratings yet
- CapsuleNetworks ASurveyDocument17 pagesCapsuleNetworks ASurveymanaliNo ratings yet
- Animal Detection 1Document56 pagesAnimal Detection 1Mohamed aslamNo ratings yet
- Computers and Geosciences: Rafael Pires de Lima, David Duarte, Charles Nicholson, Roger Slatt, Kurt J. MarfurtDocument11 pagesComputers and Geosciences: Rafael Pires de Lima, David Duarte, Charles Nicholson, Roger Slatt, Kurt J. Marfurtomaradilgeo12No ratings yet
- 3-Dynamic Digital Image AnalysisDocument8 pages3-Dynamic Digital Image Analysispranav1312002No ratings yet
- Review On Data Mining Techniques For Prediction of Water QualityDocument6 pagesReview On Data Mining Techniques For Prediction of Water QualityPraveen MNo ratings yet
- Transfer Learning For Object Detection Using State-of-the-Art Deep Neural NetworksDocument7 pagesTransfer Learning For Object Detection Using State-of-the-Art Deep Neural NetworksArebi MohamdNo ratings yet
- Diagnosis of Waterborne Microbes in Drinkable Water by Employing Image ProcessingDocument8 pagesDiagnosis of Waterborne Microbes in Drinkable Water by Employing Image Processingசசிகுமார் பகNo ratings yet
- Exploration of Optimized Semantic Segmentation ArcDocument17 pagesExploration of Optimized Semantic Segmentation ArcANINDYA APRILIYANTI PRAVITASARINo ratings yet
- A Modified Yolov3 Detection Method For Vision-Based Water Surface Garbage Capture RobotDocument11 pagesA Modified Yolov3 Detection Method For Vision-Based Water Surface Garbage Capture RobotTejas M.pNo ratings yet
- Optimized Object Tracking Technique Using Kalman FilterDocument11 pagesOptimized Object Tracking Technique Using Kalman FilterEE18B033 SOURABH KUMARNo ratings yet
- Paper 8-The Role of Hyperspectral ImagingDocument13 pagesPaper 8-The Role of Hyperspectral Imagingshaikhzubair31100% (1)
- A Novel Interpretable Ensemble Learning Method For NIR-Based Rapid Characterization of Petroleum Products-1Document11 pagesA Novel Interpretable Ensemble Learning Method For NIR-Based Rapid Characterization of Petroleum Products-1Phan NhậtNo ratings yet
- Comparison of Under Water Wireless Communication Using Deep LearningDocument8 pagesComparison of Under Water Wireless Communication Using Deep LearningInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Underwater Computer Vision: Exploring the Depths of Computer Vision Beneath the WavesFrom EverandUnderwater Computer Vision: Exploring the Depths of Computer Vision Beneath the WavesNo ratings yet
- Digital PID Speed Controller For Motor Drive Applications: V1.3 - Dec 22, 2006 English VersionDocument30 pagesDigital PID Speed Controller For Motor Drive Applications: V1.3 - Dec 22, 2006 English VersionSuphan100% (1)
- Formal MethodsDocument4 pagesFormal Methodssobia saeedNo ratings yet
- System ScienceDocument7 pagesSystem ScienceSurco AnaNo ratings yet
- Modern Control Sys-Lecture Vi PDFDocument46 pagesModern Control Sys-Lecture Vi PDFMtanzania MtanzaniaNo ratings yet
- Savt - All ChartsDocument13 pagesSavt - All ChartsLucas Brunetto100% (1)
- 1 Online Game Addiction Addiction Addiction Addiction Among University University University University Student Student Student Students Lujiaozi Lujiaozi Lujiaozi Lujiaozi Wang Siyu Zhu 2011 International International IntDocument21 pages1 Online Game Addiction Addiction Addiction Addiction Among University University University University Student Student Student Students Lujiaozi Lujiaozi Lujiaozi Lujiaozi Wang Siyu Zhu 2011 International International IntAngelo PayawalNo ratings yet
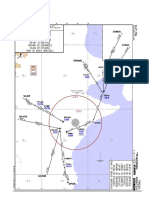
- LSZH App1 Ils14 PDFDocument1 pageLSZH App1 Ils14 PDFRadu Andrei MalicaNo ratings yet
- Oop AssignmentDocument4 pagesOop AssignmentTaurus MahamNo ratings yet
- Efficiently Updatable Neural NetworkDocument2 pagesEfficiently Updatable Neural Networkjoseph458No ratings yet
- Introduction To HVAC SystemsDocument3 pagesIntroduction To HVAC SystemsDesiree Faith V. DumadagNo ratings yet
- 01 Sampling and Reconstruction v4Document5 pages01 Sampling and Reconstruction v4Adrià PonsNo ratings yet
- Software Project Management, Walker Royce Pearson Education, 2005-2-1-21-27-9Document2 pagesSoftware Project Management, Walker Royce Pearson Education, 2005-2-1-21-27-9hugoqbNo ratings yet
- Differance Between Scada PLC and DcsDocument17 pagesDifferance Between Scada PLC and Dcsan7oopNo ratings yet
- My GenogramDocument15 pagesMy GenogramJam Knows Right100% (3)
- Multivariable Feedback Control - Analysis and DesignDocument303 pagesMultivariable Feedback Control - Analysis and DesignhassanaagibNo ratings yet
- Class 11 Chemistry NCERT Textbook Chapter 6 Thermodynamics PDFDocument37 pagesClass 11 Chemistry NCERT Textbook Chapter 6 Thermodynamics PDFSaketh VuppalapatiNo ratings yet
- IpcDocument3 pagesIpcJigna PatelNo ratings yet
- Pci 1Document11 pagesPci 1SANDEEPNo ratings yet
- Lesson Plan Thermo - NewDocument4 pagesLesson Plan Thermo - Newविशाल पुडासैनीNo ratings yet
- Quiz Chapter 1Document14 pagesQuiz Chapter 1mahdiNo ratings yet
- Online Training - SIMATIC MANAGER and WINCC/SCADA Course For SIMATIC S7-300/400Document3 pagesOnline Training - SIMATIC MANAGER and WINCC/SCADA Course For SIMATIC S7-300/400Adetunji TaiwoNo ratings yet
- Cse304 Oose Lab ManualDocument85 pagesCse304 Oose Lab ManualrpssuvethaNo ratings yet
- Model Predictive Control of DFIG-based Wind Turbines PDFDocument6 pagesModel Predictive Control of DFIG-based Wind Turbines PDFLaOrt MLNo ratings yet
- Missile Control Part IDocument13 pagesMissile Control Part ID.Viswanath100% (2)
- Control Assignment Rev 3Document23 pagesControl Assignment Rev 3Dean WoolleyNo ratings yet
- Chapter+4+Revision+notes - PDF ICT2621Document5 pagesChapter+4+Revision+notes - PDF ICT2621mmasalekNo ratings yet
- IEEE WorkShop Slides LavretskyDocument185 pagesIEEE WorkShop Slides LavretskyTu DuongNo ratings yet
- Process Control and InstrumentationDocument22 pagesProcess Control and InstrumentationJyoti Swaroop50% (2)
- Modeling, Simulation and Control of A Robotic Arm PDFDocument7 pagesModeling, Simulation and Control of A Robotic Arm PDFshivaramreddyNo ratings yet