Download as pdf or txt
You might also like
- Unit8-Induction MotorDocument40 pagesUnit8-Induction MotorsaravananNo ratings yet
- The Sugarcube Sc-1 Mini: SweetvinylDocument2 pagesThe Sugarcube Sc-1 Mini: SweetvinylTaeMinKimNo ratings yet
- 26 - LCCI L3 AC - Sep 2019 - ASE 20104 - MSDocument15 pages26 - LCCI L3 AC - Sep 2019 - ASE 20104 - MSKhin Zaw Htwe100% (6)
- Cadchart 2 PDFDocument2 pagesCadchart 2 PDFLouriel NopalNo ratings yet
- TM355: Communications Technology: Take Home Exam For Final Assignment 2020-2021/ FallDocument7 pagesTM355: Communications Technology: Take Home Exam For Final Assignment 2020-2021/ FallHusseinJdeedNo ratings yet
- KM Instructor Course Phase 1aDocument22 pagesKM Instructor Course Phase 1anozza_1No ratings yet
- E2 Subject1 Fan MotorsmodifiedDocument67 pagesE2 Subject1 Fan Motorsmodifiedapi-237496924100% (1)
- ME8791 UNIT 5-CompressedDocument38 pagesME8791 UNIT 5-CompressedAntony PrabuNo ratings yet
- Unit-4 Synchronous & Auto Synchronous Motor: N S N SDocument8 pagesUnit-4 Synchronous & Auto Synchronous Motor: N S N SDharamNo ratings yet
- Alternator Basics - NSDocument69 pagesAlternator Basics - NSdaftpunk1402No ratings yet
- Capstone Design - Robotics: Motors and ControlDocument49 pagesCapstone Design - Robotics: Motors and ControlAyman HussienNo ratings yet
- Synchronous Generators Synchronous Generators: DR - Francis M. FernandezDocument36 pagesSynchronous Generators Synchronous Generators: DR - Francis M. FernandezKanhaNo ratings yet
- Alternating Current Motors: Single-Phase Three-PhaseDocument56 pagesAlternating Current Motors: Single-Phase Three-Phaseeyd bartulabaNo ratings yet
- Structure of Stepping Motors Principles of OperationDocument10 pagesStructure of Stepping Motors Principles of OperationphapsvnNo ratings yet
- Module 3Document45 pagesModule 3prashanth9.n.sNo ratings yet
- Construction Operation and Basic Control of VR, PM and Hybrid Type Stepper MotorsDocument5 pagesConstruction Operation and Basic Control of VR, PM and Hybrid Type Stepper MotorsSew KariyawasamNo ratings yet
- Chapter # 7 Induction Motor: Motor Construction: Stator: Rotor: RotorDocument19 pagesChapter # 7 Induction Motor: Motor Construction: Stator: Rotor: RotorSamiNo ratings yet
- DC - Motors TutorialDocument6 pagesDC - Motors Tutorialozoemena29No ratings yet
- Unit-1 Stepper MotorDocument39 pagesUnit-1 Stepper MotorkoundinyaNo ratings yet
- The Basics of Stepping MotorsDocument6 pagesThe Basics of Stepping MotorsSherif EltoukhiNo ratings yet
- 00 - Drivetechnology BasicsDocument28 pages00 - Drivetechnology Basicsmikifit1No ratings yet
- STSPIN820: Microstepping Management: Application NoteDocument19 pagesSTSPIN820: Microstepping Management: Application NoteguptaamitalwNo ratings yet
- Robot Actuators: Stepper Motors DC Motors AC Motors Physics Review: Nature Is LazyDocument76 pagesRobot Actuators: Stepper Motors DC Motors AC Motors Physics Review: Nature Is Lazymahendra babu mekalaNo ratings yet
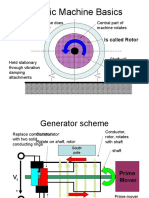
- Electric Machine Basics: Is Called Stator Is Called RotorDocument10 pagesElectric Machine Basics: Is Called Stator Is Called RotorSatrio WibowoNo ratings yet
- Cluster 1 - StepperDocument124 pagesCluster 1 - StepperBhargav Ram ThallapudiNo ratings yet
- AC Induction MotorsDocument13 pagesAC Induction Motorsanas08No ratings yet
- 3-Phase Synchronous MotorDocument5 pages3-Phase Synchronous Motorabhioptimus00No ratings yet
- B - Inductance ProfileDocument4 pagesB - Inductance ProfileAlisha AnjumNo ratings yet
- Spacial Mech Unit3Document15 pagesSpacial Mech Unit3Abhishek SinghNo ratings yet
- VR SMDocument15 pagesVR SMramprabhakarjNo ratings yet
- Special Electrical Machines: Unit-3: Stepper Motor & Switched Reluctance MotorDocument51 pagesSpecial Electrical Machines: Unit-3: Stepper Motor & Switched Reluctance MotorVikash TiwariNo ratings yet
- Calculation of Unbalanced Magnetic Pull in A Salient-Pole Synchronous Generator Using Finite-Element Method and Measured Shaft OrbitDocument14 pagesCalculation of Unbalanced Magnetic Pull in A Salient-Pole Synchronous Generator Using Finite-Element Method and Measured Shaft OrbitLeonardo SicchieriNo ratings yet
- See 1307Document181 pagesSee 1307EEEDEPTGECNo ratings yet
- Stepper MotorDocument12 pagesStepper MotorSomya GuptaNo ratings yet
- Stepper Motor: B.E.E-IV Section-B2 Roll-001610801123Document27 pagesStepper Motor: B.E.E-IV Section-B2 Roll-001610801123abhrajit ghoshNo ratings yet
- Mechatronics SystemsDocument3 pagesMechatronics SystemsJay Patrick Vincent JameroNo ratings yet
- Motores Paso A Paso Ingles 3Document8 pagesMotores Paso A Paso Ingles 3JavierNo ratings yet
- Lecture 2 - Variable Reluctance Stepper MotorDocument21 pagesLecture 2 - Variable Reluctance Stepper MotorVaibhav SansareNo ratings yet
- Synchronous MotorDocument18 pagesSynchronous Motorrakulkavi4No ratings yet
- EM214Induction Motorchapter 3Document46 pagesEM214Induction Motorchapter 3mahrusNo ratings yet
- Sem NotesDocument189 pagesSem NotesAish KrishNo ratings yet
- Chapter 3 PDFDocument32 pagesChapter 3 PDFSyazwan HafidziNo ratings yet
- Module 4 5Document35 pagesModule 4 5Atharva KhadseNo ratings yet
- Induction Motor - NotesDocument9 pagesInduction Motor - NotesG2zapper gamingNo ratings yet
- Chapter Two ServomotorsDocument48 pagesChapter Two ServomotorsBehnamNo ratings yet
- Chapter 4 - Induction Motor Drives - Part1 - AddDocument46 pagesChapter 4 - Induction Motor Drives - Part1 - AddZafirah HanafiNo ratings yet
- Stepper Motor 23.06.2020Document35 pagesStepper Motor 23.06.2020sharon monishaNo ratings yet
- Rotating Electrical MachinesDocument75 pagesRotating Electrical MachinesRajan SinghNo ratings yet
- Special Electrical MachinesDocument28 pagesSpecial Electrical Machinesokerojr94No ratings yet
- Three Phase Induction Machines-1pDocument58 pagesThree Phase Induction Machines-1pSaikat SahuNo ratings yet
- SmotorDocument20 pagesSmotorAamer MohammedNo ratings yet
- ELECTRICITY II: Generation & DistributionDocument16 pagesELECTRICITY II: Generation & DistributionJake BrohawnNo ratings yet
- TPSMDocument26 pagesTPSMLaasya RevillaNo ratings yet
- Xlecture 8 - AC DrivesDocument20 pagesXlecture 8 - AC DrivesমোঃওমরফারুকNo ratings yet
- MotorsDocument10 pagesMotorskumiho_warriorNo ratings yet
- Driving Stepper Motors Using NXP I C-Bus GPIO Expanders: Rev. 2 - 11 October 2011 Application NoteDocument31 pagesDriving Stepper Motors Using NXP I C-Bus GPIO Expanders: Rev. 2 - 11 October 2011 Application NoteMike ThomsonNo ratings yet
- NPM Linear Shaft Motor Europe2017Document24 pagesNPM Linear Shaft Motor Europe2017Alexander Aristizábal PeñalozaNo ratings yet
- Eee 2415 Tacho-GeneratorsDocument2 pagesEee 2415 Tacho-Generatorsdavidfavour263No ratings yet
- Im 1Document45 pagesIm 1Chhaya TiwariNo ratings yet
- SRM 20230829 0001Document7 pagesSRM 20230829 0001geceeetlpNo ratings yet
- 7.1 Resolver PrinciplesDocument10 pages7.1 Resolver PrinciplesJelena Blagojevic-IgnjatovicNo ratings yet
- ELECTROMAGNETISMDocument39 pagesELECTROMAGNETISMAgnibho GuruNo ratings yet
- 12 SEE - Induction Machines 2Document13 pages12 SEE - Induction Machines 2Luís AzevedoNo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- Review LeadershipDocument10 pagesReview LeadershipON ChannelIDNo ratings yet
- Product Data: Side Discharge AC ModelsDocument12 pagesProduct Data: Side Discharge AC ModelsAlejandro OrdoñezNo ratings yet
- Thời gian làm bài 120 phút, không kể thời gian giao đềDocument9 pagesThời gian làm bài 120 phút, không kể thời gian giao đềĐỗ Hoàng DũngNo ratings yet
- Ads Member 2Document28 pagesAds Member 2Kevin TtitoNo ratings yet
- CE 632 Shallow Foundations Part-2 HandoutDocument7 pagesCE 632 Shallow Foundations Part-2 HandoutLouis KiwaNo ratings yet
- About Querying The RMAN MetadataDocument26 pagesAbout Querying The RMAN MetadatautpalbasakNo ratings yet
- Pure EnergyDocument5 pagesPure EnergyRaj ChaurasiaNo ratings yet
- 15 3 16 - p.325 331 PDFDocument7 pages15 3 16 - p.325 331 PDFbeatcookNo ratings yet
- Computer Controlled Heat Exchanger Service Module - Ht30XcDocument12 pagesComputer Controlled Heat Exchanger Service Module - Ht30XcEmonbeifo EfosasereNo ratings yet
- 1350.09 Rajlaxmi Construction NewDocument5 pages1350.09 Rajlaxmi Construction Newpriyanka singhNo ratings yet
- Chapter 75Document2 pagesChapter 75Quranic ResourcesNo ratings yet
- Proverbs 18-24 Ronnie LoudermilkDocument1 pageProverbs 18-24 Ronnie LoudermilkKeneth Chris NamocNo ratings yet
- Air Conditioning System: Click The Volvo-Logo in The Lower Right Corner To Return To This Menu Main MenuDocument22 pagesAir Conditioning System: Click The Volvo-Logo in The Lower Right Corner To Return To This Menu Main MenuLeopoldo Del Campo100% (1)
- Lecture-1 FOPMDocument63 pagesLecture-1 FOPMIMRANNo ratings yet
- Recruitment and Selection Kamini-200Document98 pagesRecruitment and Selection Kamini-200Mohammad ShoebNo ratings yet
- HR Practices NTPCDocument16 pagesHR Practices NTPCRuchika SinhaNo ratings yet
- Mission Document 2Document7 pagesMission Document 2alistair_bates_1No ratings yet
- PPM Case Study AnswersDocument15 pagesPPM Case Study AnswersMohamed Kadri100% (2)
- Co-Designing Machine Learning Apps in K-12 With Primary School ChildrenDocument3 pagesCo-Designing Machine Learning Apps in K-12 With Primary School ChildrenLucas FiordelisiNo ratings yet
- Assignment Rubric Template 8.17.21Document3 pagesAssignment Rubric Template 8.17.21Aris Kendell BungabongNo ratings yet
- Lab Report2 Keil SimulatorDocument11 pagesLab Report2 Keil SimulatorKhubaib WaqarNo ratings yet
- GCV - SRV Overhauling and Calibration - Automation & Control Engineering ForumDocument1 pageGCV - SRV Overhauling and Calibration - Automation & Control Engineering Forumعبدالسلام المبروك ابوزنادNo ratings yet
- 4thh Quarter Pre TestDocument1 page4thh Quarter Pre TestAlona Camino100% (2)
- FlowDocument8 pagesFlowAnasBahariNo ratings yet
- Sap fb08 Amp f80 Tutorial Document ReversalDocument16 pagesSap fb08 Amp f80 Tutorial Document Reversalsaeedawais47No ratings yet