Download as pdf or txt
You might also like
- REVISI-Haberman, R. Mathematical Models - Mechanical Vibrations, Population Dynamics, and Trafic Flow - Compressed PDFDocument421 pagesREVISI-Haberman, R. Mathematical Models - Mechanical Vibrations, Population Dynamics, and Trafic Flow - Compressed PDFNaya100% (2)
- John Holland 1995 - Hidden Order - How Adaptation Builds Complexity - Kilroy 600dpi Part 1Document204 pagesJohn Holland 1995 - Hidden Order - How Adaptation Builds Complexity - Kilroy 600dpi Part 1Lolo Set100% (4)
- 1 s2.0 S0022247X14008610 MainDocument19 pages1 s2.0 S0022247X14008610 MainAnkit ParwaliyaNo ratings yet
- Numerical Solution of A Fractal-Fractional Order CDocument18 pagesNumerical Solution of A Fractal-Fractional Order Czohaibhasssn87No ratings yet
- STE034 Kuang DDEsDocument5 pagesSTE034 Kuang DDEsMDARQUAMNo ratings yet
- Bouvrie 2011Document14 pagesBouvrie 2011Paulo MarquesNo ratings yet
- Analysis On The Time and Frequency Domain For The RC Electric Circuit of Fractional OrderDocument6 pagesAnalysis On The Time and Frequency Domain For The RC Electric Circuit of Fractional Orderyashalbhavi765No ratings yet
- Algorithms For Multidimensional Spectral Factorization and Sum of SquaresDocument21 pagesAlgorithms For Multidimensional Spectral Factorization and Sum of SquaresPuoyaNo ratings yet
- 1 s2.0 S2211379721002783 MainDocument14 pages1 s2.0 S2211379721002783 MainEl-Mehdi FarahNo ratings yet
- Large DerivationsDocument53 pagesLarge DerivationsyoachallengeNo ratings yet
- A Green's Function Approach For The Numerical Solution of A Class of Fractional Reaction-Diffusion EquationsDocument13 pagesA Green's Function Approach For The Numerical Solution of A Class of Fractional Reaction-Diffusion EquationsFrancisco ValdesNo ratings yet
- Implementation of Elastic-Plastic Model in PdlammpsDocument7 pagesImplementation of Elastic-Plastic Model in PdlammpsSaeed AbdNo ratings yet
- Delay Differential Equation With Application in PoDocument13 pagesDelay Differential Equation With Application in Pobias sufiNo ratings yet
- Optik: Original Research ArticleDocument14 pagesOptik: Original Research ArticleBaljinderNo ratings yet
- TMJ 2017 0002Document11 pagesTMJ 2017 0002karim kamalNo ratings yet
- Mathematical and Computer Modelling: Pan-Ping LiuDocument7 pagesMathematical and Computer Modelling: Pan-Ping LiuSwift Tailor GameNo ratings yet
- A Data-Based Power Transformation For Compositional DataDocument9 pagesA Data-Based Power Transformation For Compositional DataBao Trang TrangNo ratings yet
- ModelingDocument11 pagesModelingAdetola OgungbenroNo ratings yet
- 1 (2013)Document11 pages1 (2013)LiaNo ratings yet
- Michael Parkinson PDFDocument6 pagesMichael Parkinson PDFPepeNo ratings yet
- Oshaguinessy and ProcacciaDocument4 pagesOshaguinessy and ProcacciaNo HernaNo ratings yet
- Sparse Representations and Low-Rank Tensor ApproximationDocument19 pagesSparse Representations and Low-Rank Tensor ApproximationIsaiah SunNo ratings yet
- Optimally Rotation-Equivariant DirectionalDocument8 pagesOptimally Rotation-Equivariant DirectionalEloisa PotrichNo ratings yet
- A Novel Frequency Reconfigurable HF Broadband Whip Antenna Based On GOA OptimizationDocument11 pagesA Novel Frequency Reconfigurable HF Broadband Whip Antenna Based On GOA OptimizationasundararajindiaNo ratings yet
- Lab 5: Nonlinear Systems: GoalsDocument5 pagesLab 5: Nonlinear Systems: GoalsVinodhini RavikumarNo ratings yet
- Stability Analysis of Prey-Predator Model With Two Prey and One Predator Using Fuzzy Impulsive ControlDocument14 pagesStability Analysis of Prey-Predator Model With Two Prey and One Predator Using Fuzzy Impulsive Controlkkr.nitpyNo ratings yet
- Fractals DiffusionDocument11 pagesFractals Diffusionscribd4tavoNo ratings yet
- Darling LdaDocument10 pagesDarling Ldaguru dineshNo ratings yet
- 2.research Paper Solution of Fractional Partial DiffDocument17 pages2.research Paper Solution of Fractional Partial Diff8103 Suyash DewanganNo ratings yet
- File 1323Document8 pagesFile 1323Migle GirsaiteNo ratings yet
- On Nabla Conformable Fractional Hardy-Type Inequalities On Arbitrary Time ScalesDocument23 pagesOn Nabla Conformable Fractional Hardy-Type Inequalities On Arbitrary Time ScalesCarlos TavaresNo ratings yet
- 1 s2.0 S2666657X23000307 MainDocument13 pages1 s2.0 S2666657X23000307 Mainsonimohit895No ratings yet
- Research ArticleDocument19 pagesResearch ArticleMasterLuisNo ratings yet
- Estimation of Hydraulic Parameters Under Unsaturated Flow Condition in Heap LeachingDocument12 pagesEstimation of Hydraulic Parameters Under Unsaturated Flow Condition in Heap LeachingPatricio Saldaña MirandaNo ratings yet
- Kuang Delay DEsDocument12 pagesKuang Delay DEsLakshmi BurraNo ratings yet
- Fingerprint Classification Using Kohonen Topologic MapDocument4 pagesFingerprint Classification Using Kohonen Topologic MapMohd Razif ShamsuddinNo ratings yet
- Derrida Large DeviationsDocument13 pagesDerrida Large Deviationsanurag sahayNo ratings yet
- Math 07 01 075Document20 pagesMath 07 01 075zentar02No ratings yet
- Analysis On A Nonlinear Fractional Differential EqDocument19 pagesAnalysis On A Nonlinear Fractional Differential EqVadel SniperNo ratings yet
- Proc 1 2022 55 64 - 20220204154542Document10 pagesProc 1 2022 55 64 - 20220204154542Majeed AliNo ratings yet
- A New Hyperchaotic Hyperjerk System With Three Nonlinear Terms, Its Synchronization and Circuit SimulationDocument8 pagesA New Hyperchaotic Hyperjerk System With Three Nonlinear Terms, Its Synchronization and Circuit SimulationMada Sanjaya WsNo ratings yet
- Applications of Fractional Differential Equations: Applied Mathematical Sciences, Vol. 4, 2010, No. 50, 2453 - 2461Document9 pagesApplications of Fractional Differential Equations: Applied Mathematical Sciences, Vol. 4, 2010, No. 50, 2453 - 2461TeferiNo ratings yet
- Pre 19 FluctthkpzDocument6 pagesPre 19 FluctthkpzhoraciowioNo ratings yet
- Archive of SIDDocument12 pagesArchive of SIDHalilKrizevacNo ratings yet
- Maintaining Coherence in Quantum Computers.Document13 pagesMaintaining Coherence in Quantum Computers.Jingkai JiaNo ratings yet
- Text 1Document6 pagesText 1sharma.patanjaliNo ratings yet
- Fractional Proteins CSF 2018-3Document6 pagesFractional Proteins CSF 2018-3phongo pilaneNo ratings yet
- Biological Population Model and Its Solution by Reduced Differential Transform MethodDocument10 pagesBiological Population Model and Its Solution by Reduced Differential Transform MethodAsia Pacific Journal of Engineering Science and TechnologyNo ratings yet
- Similarity Measure For Sequences of Categorical DataDocument12 pagesSimilarity Measure For Sequences of Categorical DataNeti SuherawatiNo ratings yet
- The Numerical Solution of Fractional Differential EquationsDocument14 pagesThe Numerical Solution of Fractional Differential Equationsdarwin.mamaniNo ratings yet
- Asia Pacific JournalDocument12 pagesAsia Pacific JournalMaths BookNo ratings yet
- Libxc: A Library of Exchange and Correlation Functionals For Density Functional TheoryDocument15 pagesLibxc: A Library of Exchange and Correlation Functionals For Density Functional Theoryg198817492No ratings yet
- Computing Hyperelliptic Integrals For Surface Measure of EllipsoidsDocument15 pagesComputing Hyperelliptic Integrals For Surface Measure of EllipsoidsBRANDON ALBERTO QUINTERO CIFUENTESNo ratings yet
- SPIV Abgabe OpDocument241 pagesSPIV Abgabe Ophzd199623333No ratings yet
- Clustering Transition in A System of Particles Self-Consistently Driven by A Shear FlowDocument5 pagesClustering Transition in A System of Particles Self-Consistently Driven by A Shear Flowjohnzeze2023No ratings yet
- Guido 2011Document3 pagesGuido 2011Kaustubh VenkateshNo ratings yet
- Laplace ofDocument9 pagesLaplace ofEnrique PriceNo ratings yet
- General Formula For Stability Testing of Linear Systems With Fractional Delay Characteristic EquationDocument8 pagesGeneral Formula For Stability Testing of Linear Systems With Fractional Delay Characteristic EquationPranjali KNo ratings yet
- Journal of Statistical SoftwareDocument25 pagesJournal of Statistical Softwarecarles1972mmNo ratings yet
- Fluids 04 00081 - PubDocument24 pagesFluids 04 00081 - PubGuillermo ArayaNo ratings yet
- Modelling Some Real Phenomena by Fractional DifferentialDocument11 pagesModelling Some Real Phenomena by Fractional Differentialdarwin.mamaniNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Design Thinking: Prepared by DR - S.Padma Priya/AP/ EnglishDocument42 pagesDesign Thinking: Prepared by DR - S.Padma Priya/AP/ Englishjayaram prakash kNo ratings yet
- FractionalDocument14 pagesFractionaljayaram prakash kNo ratings yet
- ITransformDocument20 pagesITransformjayaram prakash kNo ratings yet
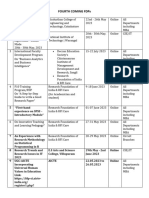
- Upcoming FDPs 2023Document2 pagesUpcoming FDPs 2023jayaram prakash kNo ratings yet
- New Doc Nov 5, 2020 4.08 PM - Page 1Document1 pageNew Doc Nov 5, 2020 4.08 PM - Page 1jayaram prakash kNo ratings yet
- Grant Application For Drdo WorkshopDocument5 pagesGrant Application For Drdo Workshopjayaram prakash kNo ratings yet
- Dec 2013 Que Paper ADocument22 pagesDec 2013 Que Paper Ajayaram prakash kNo ratings yet
- 10 Problems Coding SolutionsDocument3 pages10 Problems Coding Solutionsjayaram prakash kNo ratings yet
- Dec 2014 Que Paper BDocument34 pagesDec 2014 Que Paper Bjayaram prakash kNo ratings yet
- Dec 2011 Que Paper CDocument27 pagesDec 2011 Que Paper Cjayaram prakash kNo ratings yet
- DifferentiationDocument49 pagesDifferentiationjayaram prakash kNo ratings yet
- A Distributional Approach To Fractional Sobolev Spaces and Fractional Variation AsymptoticsDocument79 pagesA Distributional Approach To Fractional Sobolev Spaces and Fractional Variation Asymptoticsjayaram prakash kNo ratings yet
- New Doc Nov 5, 2020 4.05 PM - Page 1Document1 pageNew Doc Nov 5, 2020 4.05 PM - Page 1jayaram prakash kNo ratings yet
- New Doc Nov 2, 2020 3.26 PM - Page 1Document1 pageNew Doc Nov 2, 2020 3.26 PM - Page 1jayaram prakash kNo ratings yet
- E Le Ac (Arxa) : Splet IdDocument19 pagesE Le Ac (Arxa) : Splet Idjayaram prakash kNo ratings yet
- Measure June 30 2021Document32 pagesMeasure June 30 2021jayaram prakash kNo ratings yet
- Measure July 20 2021Document13 pagesMeasure July 20 2021jayaram prakash kNo ratings yet
- Measurable Functions: Anil Kumar V. July 19, 2021Document16 pagesMeasurable Functions: Anil Kumar V. July 19, 2021jayaram prakash kNo ratings yet
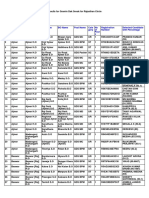
- Rajasthan-18 Results PDFDocument50 pagesRajasthan-18 Results PDFjayaram prakash kNo ratings yet
- Unit 4Document67 pagesUnit 4jayaram prakash kNo ratings yet
- Mathematics-I Prof. S.K. Ray Department of Mathematics and Statistics Indian Institute of Technology, Kanpur Lecture - 2 SequencesDocument24 pagesMathematics-I Prof. S.K. Ray Department of Mathematics and Statistics Indian Institute of Technology, Kanpur Lecture - 2 Sequencesjayaram prakash kNo ratings yet
- Let I8a: T E ) F - QtaDocument17 pagesLet I8a: T E ) F - Qtajayaram prakash kNo ratings yet
- Unit 5Document35 pagesUnit 5jayaram prakash kNo ratings yet
- Kashmir ColorsDocument7 pagesKashmir Colorsjayaram prakash kNo ratings yet
- University of South Wales ("USW") : Terms and Conditions For International StudentsDocument5 pagesUniversity of South Wales ("USW") : Terms and Conditions For International Studentsjayaram prakash kNo ratings yet
- Recommendation LetterDocument1 pageRecommendation Letterjayaram prakash kNo ratings yet
- Tamil Nadu Public Service Commission: 2. Distribution of VacanciesDocument21 pagesTamil Nadu Public Service Commission: 2. Distribution of Vacanciesjayaram prakash kNo ratings yet
- Problems in Real Analysis: Advanced Calculus On The Real AxisDocument2 pagesProblems in Real Analysis: Advanced Calculus On The Real Axisjayaram prakash kNo ratings yet
- Covid 19 PDFDocument1 pageCovid 19 PDFjayaram prakash kNo ratings yet
- A May-Holling-Tanner Predator-Prey Model With Multiple Allee Effects On The Prey and An Alternative Food Source For The PredatorDocument24 pagesA May-Holling-Tanner Predator-Prey Model With Multiple Allee Effects On The Prey and An Alternative Food Source For The PredatorramadhaniNo ratings yet
- Exercise 6: TTK4130 Modeling and SimulationDocument9 pagesExercise 6: TTK4130 Modeling and SimulationRabbiNo ratings yet
- Biomathematics JYTDocument195 pagesBiomathematics JYTWalter OkongoNo ratings yet
- Classical MechanicsDocument193 pagesClassical Mechanicsanupam10311No ratings yet
- An Eco-Epidemiological Predator-Prey Model Where Predators Distinguish Between Susceptible and Infected PreyDocument37 pagesAn Eco-Epidemiological Predator-Prey Model Where Predators Distinguish Between Susceptible and Infected PreyAS GaneshaNo ratings yet
- Analyzing Predator-Prey Models Using Systems of Ordinary Linear D PDFDocument28 pagesAnalyzing Predator-Prey Models Using Systems of Ordinary Linear D PDFAnonymous Zd2zqhDYzQNo ratings yet
- Korotayev Introduction To Social Macrodynamics Volume 1 Full PDFDocument129 pagesKorotayev Introduction To Social Macrodynamics Volume 1 Full PDFAntonio Del NegroNo ratings yet
- A System Dynamics - Approach - To - Modeling - FDocument11 pagesA System Dynamics - Approach - To - Modeling - FFirdaus BasbethNo ratings yet
- Chemical DynamicsDocument407 pagesChemical DynamicsRodrigo Martinez0% (1)
- 233 CSM Lecture Notes 2Document9 pages233 CSM Lecture Notes 2rub786No ratings yet
- Exercise Set 05Document5 pagesExercise Set 05puss_trNo ratings yet
- NDST 2023Document17 pagesNDST 2023sutrimaNo ratings yet
- 10.1007@978 3 030 31019 6 PDFDocument784 pages10.1007@978 3 030 31019 6 PDFHAROLD FABIAN MURCIA MORENO100% (1)
- Mod12 - Lecture 2Document47 pagesMod12 - Lecture 2VAISHAKA N RAJ100% (1)
- Mckane 2005 PRLDocument4 pagesMckane 2005 PRLfrank ndjomatchouaNo ratings yet
- Notes Predator Prey PDFDocument8 pagesNotes Predator Prey PDFMate ŠušnjarNo ratings yet
- Linear Algebra and Differential Equations Lotka-Volterra EquationsDocument20 pagesLinear Algebra and Differential Equations Lotka-Volterra EquationsRoumen GuhaNo ratings yet
- Population Models For Single SpeciesDocument30 pagesPopulation Models For Single SpeciesKartika NugraheniNo ratings yet
- SCI 11 Module 5Document6 pagesSCI 11 Module 5Sebastian SmytheNo ratings yet
- Predator Prey ModelDocument5 pagesPredator Prey ModelAbdul ManafNo ratings yet
- Waldvogel The Period of The Lotka Volterra Model Is MonotonicDocument7 pagesWaldvogel The Period of The Lotka Volterra Model Is Monotonicjjj_ddd_pierreNo ratings yet
- STELLA AssignmentDocument10 pagesSTELLA AssignmentSyafinas AslanNo ratings yet
- Solving Differential Equations With Matlab - A Case Study: Lotka-Volterra Equations - (BASED ON WIKIPEDIA)Document7 pagesSolving Differential Equations With Matlab - A Case Study: Lotka-Volterra Equations - (BASED ON WIKIPEDIA)Foong Pei WeiNo ratings yet
- Biochemical Systems Theory A ReviewDocument53 pagesBiochemical Systems Theory A Reviewpanithisart.sNo ratings yet
- Tercera Tarea 20162 EjerciciosDocument5 pagesTercera Tarea 20162 EjerciciosNicolás TovarNo ratings yet
- Stability Analysis of Prey-Predator Model With Two Prey and One Predator Using Fuzzy Impulsive ControlDocument14 pagesStability Analysis of Prey-Predator Model With Two Prey and One Predator Using Fuzzy Impulsive Controlkkr.nitpyNo ratings yet
- Dynamicalsystems PDFDocument32 pagesDynamicalsystems PDFSaurabh SinghNo ratings yet
- Lotka-Volterra Prey Predator ModelDocument6 pagesLotka-Volterra Prey Predator ModelNeha Paddillaya100% (1)