
Ajol File Journals - 406 - Articles - 214832 - Submission - Proof - 214832 4837 530203 1 10 20210922
Ajol File Journals - 406 - Articles - 214832 - Submission - Proof - 214832 4837 530203 1 10 20210922
You might also like
- DNAADocument15 pagesDNAAtomrachNo ratings yet
- 3rd Year Internship Report Final-1Document33 pages3rd Year Internship Report Final-1david NickywoodsNo ratings yet
- Arifeto Ivan Tanaka - SV360 - Report DraftDocument11 pagesArifeto Ivan Tanaka - SV360 - Report Draftarifetoivantanaka2000No ratings yet
- Report Final SalllDocument88 pagesReport Final Salllnurhazli ibrahimNo ratings yet
- Reliable Single-Epoch Ambiguity Resolution For Short Baselines Using Combined Gps/Beidou SystemDocument12 pagesReliable Single-Epoch Ambiguity Resolution For Short Baselines Using Combined Gps/Beidou SystemThanate JongrujinanNo ratings yet
- Satellite Navigation - WikipediaDocument47 pagesSatellite Navigation - WikipediaBuba musaNo ratings yet
- Satellite NavigationDocument14 pagesSatellite NavigationCHAITUCANo ratings yet
- Sattelite NavigationDocument7 pagesSattelite Navigationaury dwight raninNo ratings yet
- Chen 2017Document24 pagesChen 2017wn1529.20000No ratings yet
- Satellite NavigationDocument42 pagesSatellite NavigationAnandNo ratings yet
- Gnss Unit 2 NotesDocument24 pagesGnss Unit 2 NotesReta BirhanuNo ratings yet
- Unit 3 GPS Surveying: Prof. Sachin Patel (91-9179883194)Document15 pagesUnit 3 GPS Surveying: Prof. Sachin Patel (91-9179883194)Anurag TiwariNo ratings yet
- Sham JasDocument25 pagesSham JasNithin MohanNo ratings yet
- GPS Presentation PDFDocument12 pagesGPS Presentation PDFDee CeeNo ratings yet
- Seminar Report On Global Positioning SystemDocument9 pagesSeminar Report On Global Positioning SystemPrincess YashikaNo ratings yet
- Kalman Filter-Based Integration of Gnss and Insar Observations For Local Nonlinear Strong DeformationsDocument23 pagesKalman Filter-Based Integration of Gnss and Insar Observations For Local Nonlinear Strong DeformationsCường Lê VănNo ratings yet
- Ten Things You Need To Know About GPS: 1) Definition: Global Positioning SystemDocument4 pagesTen Things You Need To Know About GPS: 1) Definition: Global Positioning SystemVINONo ratings yet
- Galileo PDFDocument14 pagesGalileo PDFpriscilaNo ratings yet
- Global Positioning System (GPS)Document13 pagesGlobal Positioning System (GPS)ratheeshbrNo ratings yet
- GPS Tracking SystemDocument15 pagesGPS Tracking Systemvictoradedokun69No ratings yet
- Azimuth GPSDocument18 pagesAzimuth GPSmatra08100% (1)
- Bhawani Shankar Cead Semester IV-SS2019Document30 pagesBhawani Shankar Cead Semester IV-SS2019sangey111No ratings yet
- Satellite Navigation: GeodesyDocument8 pagesSatellite Navigation: Geodesykallu mamaNo ratings yet
- Transformation Between ITRF2000 and WGS84Document12 pagesTransformation Between ITRF2000 and WGS84Brian Barito100% (1)
- Class Notes of SatelliteDocument7 pagesClass Notes of SatellitesachinNo ratings yet
- Guochang Xu, Yan Xu - GPS Theory, Algorithms and Applications (2016) - ChapterDocument15 pagesGuochang Xu, Yan Xu - GPS Theory, Algorithms and Applications (2016) - Chapternaura ANo ratings yet
- GPS PDFDocument14 pagesGPS PDFSinu VasuNo ratings yet
- Presentation 1Document11 pagesPresentation 1Rustam FullelNo ratings yet
- Engleski Jezik Seminarski RadDocument19 pagesEngleski Jezik Seminarski RadDjoledjokicNo ratings yet
- Global Navigation Satellite System and Augmentation: KctswamyDocument20 pagesGlobal Navigation Satellite System and Augmentation: KctswamyRaj HakaniNo ratings yet
- Geocentric Datum, GDM2000 For MalaysiaDocument15 pagesGeocentric Datum, GDM2000 For Malaysialegion1437100% (6)
- BCV302-ES - Module 5-GPS, DGPS, Drone Surveying PresentationDocument43 pagesBCV302-ES - Module 5-GPS, DGPS, Drone Surveying PresentationSathish YANo ratings yet
- Precision of Static GNSS Using Multi Constellation Data As A Function of Session LengthDocument12 pagesPrecision of Static GNSS Using Multi Constellation Data As A Function of Session Lengthwn1529.20000No ratings yet
- Global Positioning System: Dr. Rohit Goyal Reader, Civil Engineering Malaviya National Institute of Technology JaipurDocument27 pagesGlobal Positioning System: Dr. Rohit Goyal Reader, Civil Engineering Malaviya National Institute of Technology JaipurLionKingNo ratings yet
- Title: GPS: Global Positioning SystemDocument18 pagesTitle: GPS: Global Positioning SystemBa HoNo ratings yet
- Space Weather - 2023 - Mei - Global Three Dimensional Ionospheric Tomography by Combination of Ground Based and Space BorneDocument18 pagesSpace Weather - 2023 - Mei - Global Three Dimensional Ionospheric Tomography by Combination of Ground Based and Space BorneAdib Muhammad ShodiqNo ratings yet
- SURVEY (CET205) M5 - RemovedDocument22 pagesSURVEY (CET205) M5 - RemovedSidhartha Krishna TNo ratings yet
- Fundamentals of GPS: P.L.N. RajuDocument30 pagesFundamentals of GPS: P.L.N. RajuPranab PrajapatiNo ratings yet
- Starting With GPS BasicsDocument2 pagesStarting With GPS BasicsHannah Mae GuimbonganNo ratings yet
- Global Positioning System PDFDocument16 pagesGlobal Positioning System PDFarif iqbalNo ratings yet
- Inertial Surveying SystemDocument4 pagesInertial Surveying SystemKobe Conrad AbelleraNo ratings yet
- Materi Presentasi - Astriany Noer - ISRITIDocument6 pagesMateri Presentasi - Astriany Noer - ISRITIVicky WibisonoNo ratings yet
- Afaq Ahmed BSCE01173209Document13 pagesAfaq Ahmed BSCE01173209Afaq AhmedNo ratings yet
- GPS (Global Positioning System) - Andi English-FinalDocument38 pagesGPS (Global Positioning System) - Andi English-FinalAndi AnriansyahNo ratings yet
- Glonass Vs NavstarDocument4 pagesGlonass Vs NavstarZifceac IaroslavNo ratings yet
- Automatic Extraction and Analysis of Lineament Features Using ASTER and Sentinel 1 SAR DataDocument15 pagesAutomatic Extraction and Analysis of Lineament Features Using ASTER and Sentinel 1 SAR DataHICHAM LAHMAIDINo ratings yet
- GPS in The Topography: The System Consists of Three ComponentsDocument3 pagesGPS in The Topography: The System Consists of Three ComponentsCEFACUNDOSNo ratings yet
- Momento 3 - Tarea 2 - Calcular Coordenadas PI y Análisis Levantamientos Topograficos.Document4 pagesMomento 3 - Tarea 2 - Calcular Coordenadas PI y Análisis Levantamientos Topograficos.Magy Mendoza100% (1)
- engproc-02-00041 (1)Document7 pagesengproc-02-00041 (1)vinay009palNo ratings yet
- GPSDocument4 pagesGPSAanshu SinghNo ratings yet
- 4890 1 13116 1 10 20160107Document20 pages4890 1 13116 1 10 20160107Ana Kathrin TolentinoNo ratings yet
- Global Positioning System (GPS) AIM: To Determine The Area Using GPS APPARATUS: GPS Reciever, Batteries THEORY: The Global Positioning System (GPS) Is A Satellite-Based Navigation andDocument3 pagesGlobal Positioning System (GPS) AIM: To Determine The Area Using GPS APPARATUS: GPS Reciever, Batteries THEORY: The Global Positioning System (GPS) Is A Satellite-Based Navigation andram reddyNo ratings yet
- 4890 13116 1 PB PDFDocument20 pages4890 13116 1 PB PDFAna Kathrin TolentinoNo ratings yet
- Global Positioning System: Basic Concept of GPSDocument5 pagesGlobal Positioning System: Basic Concept of GPSsweetsureshNo ratings yet
- Flight Tests of GPS/GLONASS Precise Positioning Versus Dual Frequency KGPS ProfileDocument5 pagesFlight Tests of GPS/GLONASS Precise Positioning Versus Dual Frequency KGPS ProfileRR886No ratings yet
- Sensors: Helmert Variance Component Estimation For Multi-GNSS Relative PositioningDocument17 pagesSensors: Helmert Variance Component Estimation For Multi-GNSS Relative PositioningandenetNo ratings yet
- Sattelite Navigation ReportDocument7 pagesSattelite Navigation ReportAnanthNo ratings yet
- Remotesensing 14 03930 v2Document24 pagesRemotesensing 14 03930 v2Pedro PereiraNo ratings yet
- Global Positioning System: AbstractDocument7 pagesGlobal Positioning System: Abstractasjad12No ratings yet
- Theoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlFrom EverandTheoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlNo ratings yet
- Global Positioning System: Theory and PracticeFrom EverandGlobal Positioning System: Theory and PracticeRating: 4 out of 5 stars4/5 (1)
- The SatNav Users Guide to Navigation and Mapping Using GPSFrom EverandThe SatNav Users Guide to Navigation and Mapping Using GPSRating: 1 out of 5 stars1/5 (2)
- Lecture 5 - Adjustment of Level NetworkDocument19 pagesLecture 5 - Adjustment of Level NetworkElisha Manishimwe100% (1)
- Geographic Information System ArchitectureDocument32 pagesGeographic Information System ArchitectureElisha ManishimweNo ratings yet
- Lecture 6 - Adjustment of Horizontal SurveysDocument48 pagesLecture 6 - Adjustment of Horizontal SurveysElisha ManishimweNo ratings yet
- OSU Adjustment Notes Part 1Document225 pagesOSU Adjustment Notes Part 1Elisha ManishimweNo ratings yet
- Section - Spatial DatabasesDocument2 pagesSection - Spatial DatabasesElisha ManishimweNo ratings yet
- Integration Application-1: by JK GondweDocument21 pagesIntegration Application-1: by JK GondweElisha ManishimweNo ratings yet
- 16 - Introduction To GNSSDocument28 pages16 - Introduction To GNSSElisha ManishimweNo ratings yet
- Intergration Application - 2Document16 pagesIntergration Application - 2Elisha ManishimweNo ratings yet
- INTEGRATION Exponential & Trig FunctionsDocument15 pagesINTEGRATION Exponential & Trig FunctionsElisha ManishimweNo ratings yet
- 13 B IMPLICIT DIFFERENTIATION and RELATED RATESDocument17 pages13 B IMPLICIT DIFFERENTIATION and RELATED RATESElisha ManishimweNo ratings yet
- Definite Integration: by J K GondweDocument24 pagesDefinite Integration: by J K GondweElisha ManishimweNo ratings yet
- DIFFERENTIATION TECHNIQUES - The Chain RuleDocument17 pagesDIFFERENTIATION TECHNIQUES - The Chain RuleElisha ManishimweNo ratings yet
- 12a HIGHER ORDER DERIVATIVESDocument16 pages12a HIGHER ORDER DERIVATIVESElisha ManishimweNo ratings yet
- 13 aIMPLICIT DIFFERENTIATIONDocument23 pages13 aIMPLICIT DIFFERENTIATIONElisha ManishimweNo ratings yet
- Differentiation Application-Part 1Document15 pagesDifferentiation Application-Part 1Elisha ManishimweNo ratings yet
- Trigonometry Graphs of - Trigonometric Functions & Their InversesDocument1 pageTrigonometry Graphs of - Trigonometric Functions & Their InversesElisha ManishimweNo ratings yet
- Lecture 1 OSCILLATIONS AND WAVES-FinalDocument25 pagesLecture 1 OSCILLATIONS AND WAVES-FinalElisha ManishimweNo ratings yet
- TCPGPS Android Manual-EnDocument98 pagesTCPGPS Android Manual-EnJorge CuervoNo ratings yet
- TRAVERSEDocument19 pagesTRAVERSECian TalaveraNo ratings yet
- Lesson 11 - Compass Bearing and CorrectionDocument7 pagesLesson 11 - Compass Bearing and CorrectionREYNALD TEJERO0% (1)
- Surveying 5.1 Theodolite SurveyingDocument21 pagesSurveying 5.1 Theodolite SurveyingSrikanth KenchugunduNo ratings yet
- 2 Building Heght SEALED Earlier Version For Proclamation HBABL FinalKDocument1 page2 Building Heght SEALED Earlier Version For Proclamation HBABL FinalKHaileyesus EsubalewNo ratings yet
- Orthographic ProjectionDocument82 pagesOrthographic ProjectionFrederick MoncadaNo ratings yet
- 5 Flattening-the-Earth-with-map-projectionsDocument103 pages5 Flattening-the-Earth-with-map-projectionsKunal KhandelwalNo ratings yet
- SBXN Tma-Anapolis Atcsmac 20220519Document1 pageSBXN Tma-Anapolis Atcsmac 20220519fredson mirandaNo ratings yet
- Brunton - CompassDocument25 pagesBrunton - CompassOl SreylinNo ratings yet
- NP 63 Record of Amendments: Home IndexDocument306 pagesNP 63 Record of Amendments: Home IndextonyNo ratings yet
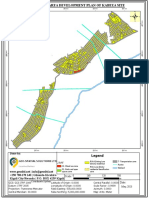
- Kabeza Physical PlanDocument1 pageKabeza Physical Plancyriaqous nacyNo ratings yet
- Data Cross - R2Document46 pagesData Cross - R2purwadiNo ratings yet
- Asurveyl Midterm Exam ReviewerDocument6 pagesAsurveyl Midterm Exam Revieweravm.beldaNo ratings yet
- # Question Type AccuracyDocument23 pages# Question Type Accuracyandreyorjuela jimenezNo ratings yet
- The Project-Equipment-Jacob StaffDocument15 pagesThe Project-Equipment-Jacob StaffVien ArellanoNo ratings yet
- Data Repot Audit PLG389 - L2300Document4 pagesData Repot Audit PLG389 - L2300Kukuh DiazNo ratings yet
- AA 1355/28 JUL/MAN-LHR: - Not For Real World NavigationDocument40 pagesAA 1355/28 JUL/MAN-LHR: - Not For Real World NavigationWaiZin MinHtetNo ratings yet
- Science 7 q4 Module 1 Locating Placesofthe Earth v1Document34 pagesScience 7 q4 Module 1 Locating Placesofthe Earth v1dpajela20ur1651No ratings yet
- Scp-Topics: Prelim Period Topics: Terms To PonderDocument7 pagesScp-Topics: Prelim Period Topics: Terms To PonderJeffrey SumambotNo ratings yet
- Revised UKC Policy and UKC Transiting MaSSDocument4 pagesRevised UKC Policy and UKC Transiting MaSSAvick TribediNo ratings yet
- Module 03 Fundasurv 215 2023 1Document13 pagesModule 03 Fundasurv 215 2023 12022310707No ratings yet
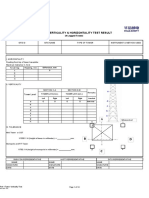
- 13 DITO Verticality Test Template v2Document14 pages13 DITO Verticality Test Template v2AndeeCris100% (1)
- Pole Forecast-EtDocument37 pagesPole Forecast-EtElery39No ratings yet
- Latitude and Longitude (Grade 7 - Lesson Plan)Document9 pagesLatitude and Longitude (Grade 7 - Lesson Plan)Cheryline OtosNo ratings yet
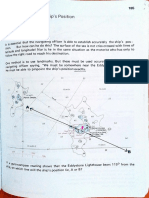
- 2023 - 07 - 09 Fixing The Ships PositionDocument25 pages2023 - 07 - 09 Fixing The Ships Positionno nameNo ratings yet
- Flight Navagation - 1Document13 pagesFlight Navagation - 1ISLAMNo ratings yet
- JamesDocument11 pagesJamesCharity Anne Pedroso100% (1)
- Lecture 12,13 (Traversing)Document41 pagesLecture 12,13 (Traversing)Ch Muhammad YousufNo ratings yet








































































































Download as pdf or txt
You might also like
- DNAADocument15 pagesDNAAtomrachNo ratings yet
- 3rd Year Internship Report Final-1Document33 pages3rd Year Internship Report Final-1david NickywoodsNo ratings yet
- Arifeto Ivan Tanaka - SV360 - Report DraftDocument11 pagesArifeto Ivan Tanaka - SV360 - Report Draftarifetoivantanaka2000No ratings yet
- Report Final SalllDocument88 pagesReport Final Salllnurhazli ibrahimNo ratings yet
- Reliable Single-Epoch Ambiguity Resolution For Short Baselines Using Combined Gps/Beidou SystemDocument12 pagesReliable Single-Epoch Ambiguity Resolution For Short Baselines Using Combined Gps/Beidou SystemThanate JongrujinanNo ratings yet
- Satellite Navigation - WikipediaDocument47 pagesSatellite Navigation - WikipediaBuba musaNo ratings yet
- Satellite NavigationDocument14 pagesSatellite NavigationCHAITUCANo ratings yet
- Sattelite NavigationDocument7 pagesSattelite Navigationaury dwight raninNo ratings yet
- Chen 2017Document24 pagesChen 2017wn1529.20000No ratings yet
- Satellite NavigationDocument42 pagesSatellite NavigationAnandNo ratings yet
- Gnss Unit 2 NotesDocument24 pagesGnss Unit 2 NotesReta BirhanuNo ratings yet
- Unit 3 GPS Surveying: Prof. Sachin Patel (91-9179883194)Document15 pagesUnit 3 GPS Surveying: Prof. Sachin Patel (91-9179883194)Anurag TiwariNo ratings yet
- Sham JasDocument25 pagesSham JasNithin MohanNo ratings yet
- GPS Presentation PDFDocument12 pagesGPS Presentation PDFDee CeeNo ratings yet
- Seminar Report On Global Positioning SystemDocument9 pagesSeminar Report On Global Positioning SystemPrincess YashikaNo ratings yet
- Kalman Filter-Based Integration of Gnss and Insar Observations For Local Nonlinear Strong DeformationsDocument23 pagesKalman Filter-Based Integration of Gnss and Insar Observations For Local Nonlinear Strong DeformationsCường Lê VănNo ratings yet
- Ten Things You Need To Know About GPS: 1) Definition: Global Positioning SystemDocument4 pagesTen Things You Need To Know About GPS: 1) Definition: Global Positioning SystemVINONo ratings yet
- Galileo PDFDocument14 pagesGalileo PDFpriscilaNo ratings yet
- Global Positioning System (GPS)Document13 pagesGlobal Positioning System (GPS)ratheeshbrNo ratings yet
- GPS Tracking SystemDocument15 pagesGPS Tracking Systemvictoradedokun69No ratings yet
- Azimuth GPSDocument18 pagesAzimuth GPSmatra08100% (1)
- Bhawani Shankar Cead Semester IV-SS2019Document30 pagesBhawani Shankar Cead Semester IV-SS2019sangey111No ratings yet
- Satellite Navigation: GeodesyDocument8 pagesSatellite Navigation: Geodesykallu mamaNo ratings yet
- Transformation Between ITRF2000 and WGS84Document12 pagesTransformation Between ITRF2000 and WGS84Brian Barito100% (1)
- Class Notes of SatelliteDocument7 pagesClass Notes of SatellitesachinNo ratings yet
- Guochang Xu, Yan Xu - GPS Theory, Algorithms and Applications (2016) - ChapterDocument15 pagesGuochang Xu, Yan Xu - GPS Theory, Algorithms and Applications (2016) - Chapternaura ANo ratings yet
- GPS PDFDocument14 pagesGPS PDFSinu VasuNo ratings yet
- Presentation 1Document11 pagesPresentation 1Rustam FullelNo ratings yet
- Engleski Jezik Seminarski RadDocument19 pagesEngleski Jezik Seminarski RadDjoledjokicNo ratings yet
- Global Navigation Satellite System and Augmentation: KctswamyDocument20 pagesGlobal Navigation Satellite System and Augmentation: KctswamyRaj HakaniNo ratings yet
- Geocentric Datum, GDM2000 For MalaysiaDocument15 pagesGeocentric Datum, GDM2000 For Malaysialegion1437100% (6)
- BCV302-ES - Module 5-GPS, DGPS, Drone Surveying PresentationDocument43 pagesBCV302-ES - Module 5-GPS, DGPS, Drone Surveying PresentationSathish YANo ratings yet
- Precision of Static GNSS Using Multi Constellation Data As A Function of Session LengthDocument12 pagesPrecision of Static GNSS Using Multi Constellation Data As A Function of Session Lengthwn1529.20000No ratings yet
- Global Positioning System: Dr. Rohit Goyal Reader, Civil Engineering Malaviya National Institute of Technology JaipurDocument27 pagesGlobal Positioning System: Dr. Rohit Goyal Reader, Civil Engineering Malaviya National Institute of Technology JaipurLionKingNo ratings yet
- Title: GPS: Global Positioning SystemDocument18 pagesTitle: GPS: Global Positioning SystemBa HoNo ratings yet
- Space Weather - 2023 - Mei - Global Three Dimensional Ionospheric Tomography by Combination of Ground Based and Space BorneDocument18 pagesSpace Weather - 2023 - Mei - Global Three Dimensional Ionospheric Tomography by Combination of Ground Based and Space BorneAdib Muhammad ShodiqNo ratings yet
- SURVEY (CET205) M5 - RemovedDocument22 pagesSURVEY (CET205) M5 - RemovedSidhartha Krishna TNo ratings yet
- Fundamentals of GPS: P.L.N. RajuDocument30 pagesFundamentals of GPS: P.L.N. RajuPranab PrajapatiNo ratings yet
- Starting With GPS BasicsDocument2 pagesStarting With GPS BasicsHannah Mae GuimbonganNo ratings yet
- Global Positioning System PDFDocument16 pagesGlobal Positioning System PDFarif iqbalNo ratings yet
- Inertial Surveying SystemDocument4 pagesInertial Surveying SystemKobe Conrad AbelleraNo ratings yet
- Materi Presentasi - Astriany Noer - ISRITIDocument6 pagesMateri Presentasi - Astriany Noer - ISRITIVicky WibisonoNo ratings yet
- Afaq Ahmed BSCE01173209Document13 pagesAfaq Ahmed BSCE01173209Afaq AhmedNo ratings yet
- GPS (Global Positioning System) - Andi English-FinalDocument38 pagesGPS (Global Positioning System) - Andi English-FinalAndi AnriansyahNo ratings yet
- Glonass Vs NavstarDocument4 pagesGlonass Vs NavstarZifceac IaroslavNo ratings yet
- Automatic Extraction and Analysis of Lineament Features Using ASTER and Sentinel 1 SAR DataDocument15 pagesAutomatic Extraction and Analysis of Lineament Features Using ASTER and Sentinel 1 SAR DataHICHAM LAHMAIDINo ratings yet
- GPS in The Topography: The System Consists of Three ComponentsDocument3 pagesGPS in The Topography: The System Consists of Three ComponentsCEFACUNDOSNo ratings yet
- Momento 3 - Tarea 2 - Calcular Coordenadas PI y Análisis Levantamientos Topograficos.Document4 pagesMomento 3 - Tarea 2 - Calcular Coordenadas PI y Análisis Levantamientos Topograficos.Magy Mendoza100% (1)
- engproc-02-00041 (1)Document7 pagesengproc-02-00041 (1)vinay009palNo ratings yet
- GPSDocument4 pagesGPSAanshu SinghNo ratings yet
- 4890 1 13116 1 10 20160107Document20 pages4890 1 13116 1 10 20160107Ana Kathrin TolentinoNo ratings yet
- Global Positioning System (GPS) AIM: To Determine The Area Using GPS APPARATUS: GPS Reciever, Batteries THEORY: The Global Positioning System (GPS) Is A Satellite-Based Navigation andDocument3 pagesGlobal Positioning System (GPS) AIM: To Determine The Area Using GPS APPARATUS: GPS Reciever, Batteries THEORY: The Global Positioning System (GPS) Is A Satellite-Based Navigation andram reddyNo ratings yet
- 4890 13116 1 PB PDFDocument20 pages4890 13116 1 PB PDFAna Kathrin TolentinoNo ratings yet
- Global Positioning System: Basic Concept of GPSDocument5 pagesGlobal Positioning System: Basic Concept of GPSsweetsureshNo ratings yet
- Flight Tests of GPS/GLONASS Precise Positioning Versus Dual Frequency KGPS ProfileDocument5 pagesFlight Tests of GPS/GLONASS Precise Positioning Versus Dual Frequency KGPS ProfileRR886No ratings yet
- Sensors: Helmert Variance Component Estimation For Multi-GNSS Relative PositioningDocument17 pagesSensors: Helmert Variance Component Estimation For Multi-GNSS Relative PositioningandenetNo ratings yet
- Sattelite Navigation ReportDocument7 pagesSattelite Navigation ReportAnanthNo ratings yet
- Remotesensing 14 03930 v2Document24 pagesRemotesensing 14 03930 v2Pedro PereiraNo ratings yet
- Global Positioning System: AbstractDocument7 pagesGlobal Positioning System: Abstractasjad12No ratings yet
- Theoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlFrom EverandTheoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlNo ratings yet
- Global Positioning System: Theory and PracticeFrom EverandGlobal Positioning System: Theory and PracticeRating: 4 out of 5 stars4/5 (1)
- The SatNav Users Guide to Navigation and Mapping Using GPSFrom EverandThe SatNav Users Guide to Navigation and Mapping Using GPSRating: 1 out of 5 stars1/5 (2)
- Lecture 5 - Adjustment of Level NetworkDocument19 pagesLecture 5 - Adjustment of Level NetworkElisha Manishimwe100% (1)
- Geographic Information System ArchitectureDocument32 pagesGeographic Information System ArchitectureElisha ManishimweNo ratings yet
- Lecture 6 - Adjustment of Horizontal SurveysDocument48 pagesLecture 6 - Adjustment of Horizontal SurveysElisha ManishimweNo ratings yet
- OSU Adjustment Notes Part 1Document225 pagesOSU Adjustment Notes Part 1Elisha ManishimweNo ratings yet
- Section - Spatial DatabasesDocument2 pagesSection - Spatial DatabasesElisha ManishimweNo ratings yet
- Integration Application-1: by JK GondweDocument21 pagesIntegration Application-1: by JK GondweElisha ManishimweNo ratings yet
- 16 - Introduction To GNSSDocument28 pages16 - Introduction To GNSSElisha ManishimweNo ratings yet
- Intergration Application - 2Document16 pagesIntergration Application - 2Elisha ManishimweNo ratings yet
- INTEGRATION Exponential & Trig FunctionsDocument15 pagesINTEGRATION Exponential & Trig FunctionsElisha ManishimweNo ratings yet
- 13 B IMPLICIT DIFFERENTIATION and RELATED RATESDocument17 pages13 B IMPLICIT DIFFERENTIATION and RELATED RATESElisha ManishimweNo ratings yet
- Definite Integration: by J K GondweDocument24 pagesDefinite Integration: by J K GondweElisha ManishimweNo ratings yet
- DIFFERENTIATION TECHNIQUES - The Chain RuleDocument17 pagesDIFFERENTIATION TECHNIQUES - The Chain RuleElisha ManishimweNo ratings yet
- 12a HIGHER ORDER DERIVATIVESDocument16 pages12a HIGHER ORDER DERIVATIVESElisha ManishimweNo ratings yet
- 13 aIMPLICIT DIFFERENTIATIONDocument23 pages13 aIMPLICIT DIFFERENTIATIONElisha ManishimweNo ratings yet
- Differentiation Application-Part 1Document15 pagesDifferentiation Application-Part 1Elisha ManishimweNo ratings yet
- Trigonometry Graphs of - Trigonometric Functions & Their InversesDocument1 pageTrigonometry Graphs of - Trigonometric Functions & Their InversesElisha ManishimweNo ratings yet
- Lecture 1 OSCILLATIONS AND WAVES-FinalDocument25 pagesLecture 1 OSCILLATIONS AND WAVES-FinalElisha ManishimweNo ratings yet
- TCPGPS Android Manual-EnDocument98 pagesTCPGPS Android Manual-EnJorge CuervoNo ratings yet
- TRAVERSEDocument19 pagesTRAVERSECian TalaveraNo ratings yet
- Lesson 11 - Compass Bearing and CorrectionDocument7 pagesLesson 11 - Compass Bearing and CorrectionREYNALD TEJERO0% (1)
- Surveying 5.1 Theodolite SurveyingDocument21 pagesSurveying 5.1 Theodolite SurveyingSrikanth KenchugunduNo ratings yet
- 2 Building Heght SEALED Earlier Version For Proclamation HBABL FinalKDocument1 page2 Building Heght SEALED Earlier Version For Proclamation HBABL FinalKHaileyesus EsubalewNo ratings yet
- Orthographic ProjectionDocument82 pagesOrthographic ProjectionFrederick MoncadaNo ratings yet
- 5 Flattening-the-Earth-with-map-projectionsDocument103 pages5 Flattening-the-Earth-with-map-projectionsKunal KhandelwalNo ratings yet
- SBXN Tma-Anapolis Atcsmac 20220519Document1 pageSBXN Tma-Anapolis Atcsmac 20220519fredson mirandaNo ratings yet
- Brunton - CompassDocument25 pagesBrunton - CompassOl SreylinNo ratings yet
- NP 63 Record of Amendments: Home IndexDocument306 pagesNP 63 Record of Amendments: Home IndextonyNo ratings yet
- Kabeza Physical PlanDocument1 pageKabeza Physical Plancyriaqous nacyNo ratings yet
- Data Cross - R2Document46 pagesData Cross - R2purwadiNo ratings yet
- Asurveyl Midterm Exam ReviewerDocument6 pagesAsurveyl Midterm Exam Revieweravm.beldaNo ratings yet
- # Question Type AccuracyDocument23 pages# Question Type Accuracyandreyorjuela jimenezNo ratings yet
- The Project-Equipment-Jacob StaffDocument15 pagesThe Project-Equipment-Jacob StaffVien ArellanoNo ratings yet
- Data Repot Audit PLG389 - L2300Document4 pagesData Repot Audit PLG389 - L2300Kukuh DiazNo ratings yet
- AA 1355/28 JUL/MAN-LHR: - Not For Real World NavigationDocument40 pagesAA 1355/28 JUL/MAN-LHR: - Not For Real World NavigationWaiZin MinHtetNo ratings yet
- Science 7 q4 Module 1 Locating Placesofthe Earth v1Document34 pagesScience 7 q4 Module 1 Locating Placesofthe Earth v1dpajela20ur1651No ratings yet
- Scp-Topics: Prelim Period Topics: Terms To PonderDocument7 pagesScp-Topics: Prelim Period Topics: Terms To PonderJeffrey SumambotNo ratings yet
- Revised UKC Policy and UKC Transiting MaSSDocument4 pagesRevised UKC Policy and UKC Transiting MaSSAvick TribediNo ratings yet
- Module 03 Fundasurv 215 2023 1Document13 pagesModule 03 Fundasurv 215 2023 12022310707No ratings yet
- 13 DITO Verticality Test Template v2Document14 pages13 DITO Verticality Test Template v2AndeeCris100% (1)
- Pole Forecast-EtDocument37 pagesPole Forecast-EtElery39No ratings yet
- Latitude and Longitude (Grade 7 - Lesson Plan)Document9 pagesLatitude and Longitude (Grade 7 - Lesson Plan)Cheryline OtosNo ratings yet
- 2023 - 07 - 09 Fixing The Ships PositionDocument25 pages2023 - 07 - 09 Fixing The Ships Positionno nameNo ratings yet
- Flight Navagation - 1Document13 pagesFlight Navagation - 1ISLAMNo ratings yet
- JamesDocument11 pagesJamesCharity Anne Pedroso100% (1)
- Lecture 12,13 (Traversing)Document41 pagesLecture 12,13 (Traversing)Ch Muhammad YousufNo ratings yet