
Flow Metering Tutorial Part 2 Pulse Base
Flow Metering Tutorial Part 2 Pulse Base
You might also like
- Checklist Testing and Inspection With Interconnection-Version 1 0 August 2015Document32 pagesChecklist Testing and Inspection With Interconnection-Version 1 0 August 2015jayapalNo ratings yet
- Sensors and Transducers: Mechatronics - Unit 1, Chapter 2Document41 pagesSensors and Transducers: Mechatronics - Unit 1, Chapter 2Vinay KNo ratings yet
- B-Stad CH 02Document27 pagesB-Stad CH 02posktovaNo ratings yet
- Measure of Angular VelocityDocument12 pagesMeasure of Angular VelocityAshley_Rulzzzzzzz100% (2)
- Rajshahi University of Engineering &technologyDocument4 pagesRajshahi University of Engineering &technologyদিব্যজয় পালNo ratings yet
- A New Generation of Contactless Magnetic Position SensorsDocument7 pagesA New Generation of Contactless Magnetic Position SensorsGautham SidharthNo ratings yet
- ICS Lab ManualDocument28 pagesICS Lab Manualashok_abclNo ratings yet
- Danaher Encoder HandbookDocument16 pagesDanaher Encoder HandbookatifkhushnoodNo ratings yet
- Position and Velocity Measurement by Optical Shaft EncodersDocument31 pagesPosition and Velocity Measurement by Optical Shaft EncodersVinit PatelNo ratings yet
- Encoder (Lab 2)Document15 pagesEncoder (Lab 2)brasengan6No ratings yet
- Encoder SDocument8 pagesEncoder SpanchalabNo ratings yet
- Question Bank - Unit VDocument5 pagesQuestion Bank - Unit Vjames RNo ratings yet
- I Am Sharing 'Speed Measurement' With You PDFDocument24 pagesI Am Sharing 'Speed Measurement' With You PDFYASH VERMANo ratings yet
- Rapport InductosynDocument13 pagesRapport InductosynHemant SavlaNo ratings yet
- Displacement and PositionDocument6 pagesDisplacement and PositioncoolhemakumarNo ratings yet
- MSD AssignmentDocument16 pagesMSD AssignmentNanda KishoreNo ratings yet
- Speed Measurement CH 1Document42 pagesSpeed Measurement CH 1unknown730407No ratings yet
- Digital TachometerDocument12 pagesDigital TachometerHariniNo ratings yet
- 3D Motion Tracking With Gyroscope and Accelerometer - 2Document26 pages3D Motion Tracking With Gyroscope and Accelerometer - 2Widji SantosoNo ratings yet
- Dhanalakshmi Srinivasan Institute of Technology - Trichy: ME8501 Metrology and Measurement Iii MechanicalDocument39 pagesDhanalakshmi Srinivasan Institute of Technology - Trichy: ME8501 Metrology and Measurement Iii MechanicalPio CasmirNo ratings yet
- Assignment 1Document9 pagesAssignment 1Alimin AnniNo ratings yet
- Optical Encoder For Motion Control Through ArduinoDocument4 pagesOptical Encoder For Motion Control Through ArduinoMary LongNo ratings yet
- Da3 QPDocument20 pagesDa3 QPsfdsjkgeifkNo ratings yet
- Sensor PDFDocument8 pagesSensor PDFConstanzaNo ratings yet
- What Are Rotary Encoders Used ForDocument11 pagesWhat Are Rotary Encoders Used ForjackNo ratings yet
- Introduction To MEMS GyroscopesDocument16 pagesIntroduction To MEMS GyroscopesErik GutiérrezNo ratings yet
- Magnet Selection GuideDocument26 pagesMagnet Selection GuideJosé AdenilsonNo ratings yet
- An Electronic Water Meter Design Using MSP430F41xDocument13 pagesAn Electronic Water Meter Design Using MSP430F41xrsrtnjNo ratings yet
- C T I /O D: Hapter WO Nput Utput EvicesDocument21 pagesC T I /O D: Hapter WO Nput Utput EvicesMohamed OmarNo ratings yet
- SA QB Solved Unit 1-2Document26 pagesSA QB Solved Unit 1-2Kundan PednekarNo ratings yet
- Module - 4 Digital and Intelligent Sensors: Position EncodersDocument23 pagesModule - 4 Digital and Intelligent Sensors: Position EncodersJnanavi B ANo ratings yet
- PLC Chapter 2 Input-Out DevicesDocument21 pagesPLC Chapter 2 Input-Out DevicesANIK Kumar SannasiNo ratings yet
- Arduino UnoDocument11 pagesArduino UnoNirav DsouzaNo ratings yet
- PIC NotesDocument17 pagesPIC Notessvyas7872No ratings yet
- Speed SensorsDocument8 pagesSpeed Sensorsajd.nanthakumarNo ratings yet
- Types of Sensors With Their Circuit Diagrams: What Is Sensor?Document48 pagesTypes of Sensors With Their Circuit Diagrams: What Is Sensor?dereje gerluNo ratings yet
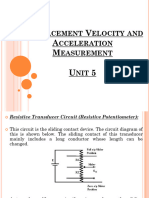
- Unit 5 Displacement, Velocity and Acceleration MeasurementDocument26 pagesUnit 5 Displacement, Velocity and Acceleration Measurementbhuyanuttam7No ratings yet
- Digital Encoders 1.2Document6 pagesDigital Encoders 1.2controlorNo ratings yet
- DC Motors: Motor (ECM or EC Motor) and Synchronous DC Motors, AreDocument21 pagesDC Motors: Motor (ECM or EC Motor) and Synchronous DC Motors, AreAhmed SayedNo ratings yet
- Lab ManualsDocument61 pagesLab ManualsLavankumar MudirajNo ratings yet
- TachometerDocument17 pagesTachometerAmrita MitraNo ratings yet
- Describe The Construction of A Electromagnetic Velocity Sensor and Explain Its WorkingDocument8 pagesDescribe The Construction of A Electromagnetic Velocity Sensor and Explain Its WorkingJiten Thakur100% (1)
- Sensors and ActuatorsDocument13 pagesSensors and Actuatorssushanta Kumar ReddyNo ratings yet
- 11N407-Sensors and Transducers Lab ManualDocument74 pages11N407-Sensors and Transducers Lab ManualrameswariNo ratings yet
- Iot Module 2Document12 pagesIot Module 2nagaraj pNo ratings yet
- 1.) RESISTIVE SENSORS: The Resistive Sensors Can Be Defined As The Resistance of A Sensor Can BeDocument3 pages1.) RESISTIVE SENSORS: The Resistive Sensors Can Be Defined As The Resistance of A Sensor Can BeSanjana SehrawatNo ratings yet
- Measurements Lecture 9Document12 pagesMeasurements Lecture 9Aliaa TarekNo ratings yet
- Vehicle Electrical GaugesDocument13 pagesVehicle Electrical GaugesSimon Mwangi kabauNo ratings yet
- 01 EncoderDocument4 pages01 EncoderAngel ChicchonNo ratings yet
- System1 Plots - Machinery-Diagnostic - Part1Document16 pagesSystem1 Plots - Machinery-Diagnostic - Part1Thyagaraju PalisettyNo ratings yet
- Sensor: Microsensor Reaches A Significantly Higher Speed and Sensitivity Compared WithDocument7 pagesSensor: Microsensor Reaches A Significantly Higher Speed and Sensitivity Compared WithMaratur RoifahNo ratings yet
- Types of Transducers and Their Applications: Instrumentation and Product TestingDocument31 pagesTypes of Transducers and Their Applications: Instrumentation and Product TestingFemi PrinceNo ratings yet
- Theory of Operation of Rate SensorsDocument4 pagesTheory of Operation of Rate SensorsPhạm Ngọc HòaNo ratings yet
- Heart Rate MonitorDocument31 pagesHeart Rate Monitorζοβαγεπ ἯοΣΣαῖη100% (2)
- Servo Encoder LabDocument8 pagesServo Encoder LabGoran MiljkovicNo ratings yet
- Welcome To International Journal of Engineering Research and Development (IJERD)Document8 pagesWelcome To International Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- U2 ISA MinorDocument44 pagesU2 ISA MinorjeyrajiNo ratings yet
- Hall-Effect Sensors: Theory and ApplicationFrom EverandHall-Effect Sensors: Theory and ApplicationRating: 5 out of 5 stars5/5 (1)
- Handbook of Mechanical and Materials EngineeringFrom EverandHandbook of Mechanical and Materials EngineeringRating: 5 out of 5 stars5/5 (4)
- Position Sensing: Angle and Distance Measurement for EngineersFrom EverandPosition Sensing: Angle and Distance Measurement for EngineersNo ratings yet
- Coriolis Mass Flow Measuring System-Description of Device FunctionsDocument198 pagesCoriolis Mass Flow Measuring System-Description of Device FunctionssalemNo ratings yet
- Unleashing The Power of Valve Automation EUDocument2 pagesUnleashing The Power of Valve Automation EUsalemNo ratings yet
- FoodDocument3 pagesFoodsalemNo ratings yet
- Honeywell Annual Report2009Document124 pagesHoneywell Annual Report2009salemNo ratings yet
- Pws - Photovoltaic Solar Power PlantsDocument3 pagesPws - Photovoltaic Solar Power PlantssalemNo ratings yet
- SmartWireless Solutions For FieldDocument32 pagesSmartWireless Solutions For FieldsalemNo ratings yet
- Emerson Natural Gas Pressure and Flow Control SolutionsDocument6 pagesEmerson Natural Gas Pressure and Flow Control SolutionssalemNo ratings yet
- Subsea BrochureDocument4 pagesSubsea BrochuresalemNo ratings yet
- Fisher FIELDVUE DVC6000 Natural Gas CertDocument4 pagesFisher FIELDVUE DVC6000 Natural Gas CertsalemNo ratings yet
- Fisher® Easy-Drive™ Electric ActuatorsDocument4 pagesFisher® Easy-Drive™ Electric ActuatorssalemNo ratings yet
- DL8000 Preset Controller - For Measuring The Loading of Liquid Hydrocarbons Into Transporting TankersDocument8 pagesDL8000 Preset Controller - For Measuring The Loading of Liquid Hydrocarbons Into Transporting Tankerssalem100% (1)
- Most Asked Coding QUESTIONSDocument30 pagesMost Asked Coding QUESTIONSsalemNo ratings yet
- Rosemount Measurement SolutionsDocument48 pagesRosemount Measurement SolutionssalemNo ratings yet
- 795X Flow Computers For The Gas IndustryDocument6 pages795X Flow Computers For The Gas IndustrysalemNo ratings yet
- Triple - IR Flame DetectorDocument4 pagesTriple - IR Flame DetectorsalemNo ratings yet
- 795X Liquid Flow Computers For The Oil and Refined Products IndustryDocument8 pages795X Liquid Flow Computers For The Oil and Refined Products IndustrysalemNo ratings yet
- UV - IR H2 Flame DetectorDocument4 pagesUV - IR H2 Flame DetectorsalemNo ratings yet
- Dan PacDocument4 pagesDan PacsalemNo ratings yet
- Roxar Sand ManagementDocument5 pagesRoxar Sand ManagementsalemNo ratings yet
- ECO Sense H2S Gas DetectorDocument2 pagesECO Sense H2S Gas DetectorsalemNo ratings yet
- Mercury Removal ProcessesDocument10 pagesMercury Removal ProcessessalemNo ratings yet
- Pressure Measurement Part2Document7 pagesPressure Measurement Part2salemNo ratings yet
- OSHA Compliance Manual - Application of Key OSHA TopicsDocument1,138 pagesOSHA Compliance Manual - Application of Key OSHA TopicssalemNo ratings yet
- Measurement GuidelinesDocument57 pagesMeasurement GuidelinessalemNo ratings yet
- ATO PWM Solar Charge Controller User ManualDocument1 pageATO PWM Solar Charge Controller User ManualCuenta De RespaldoNo ratings yet
- m3310.093 Mg15cfx Mg30cfx Mg50cfx Mg101cfx Mg102cfx Mg100hfxm3310.093 Mg15cfx Mg30cfx Mg50cfx Mg101cfx Mg102cfx Mg100hfxDocument8 pagesm3310.093 Mg15cfx Mg30cfx Mg50cfx Mg101cfx Mg102cfx Mg100hfxm3310.093 Mg15cfx Mg30cfx Mg50cfx Mg101cfx Mg102cfx Mg100hfxRaphael BarbozaNo ratings yet
- Manual Transferencia Automática Edificio ATS-01 PDFDocument22 pagesManual Transferencia Automática Edificio ATS-01 PDFAlberto Jaime50% (2)
- Abdullah Project ReportDocument15 pagesAbdullah Project ReportHafiz AbdullahNo ratings yet
- Pci2Pmc: Dynamic EngineeringDocument15 pagesPci2Pmc: Dynamic EngineeringSteven YangNo ratings yet
- Bipolar Junction Transistor: ELAC 223/221L Electronics 1Document25 pagesBipolar Junction Transistor: ELAC 223/221L Electronics 1Sepillo RandelNo ratings yet
- 2.1 LPC2129 Microcontroller: 2.1.1 FeaturesDocument14 pages2.1 LPC2129 Microcontroller: 2.1.1 FeaturesBhaskar Rao PNo ratings yet
- Component 1Document5 pagesComponent 1Ha FaiazNo ratings yet
- Physics Projects-2Document13 pagesPhysics Projects-2Gracy RajoraNo ratings yet
- Mei Cashflow SC / SC Advance Operation & Maintenance ManualDocument14 pagesMei Cashflow SC / SC Advance Operation & Maintenance ManualNosce Te IpsumNo ratings yet
- MANUAL KGK INK JET - Hardware PDFDocument247 pagesMANUAL KGK INK JET - Hardware PDFDidot KobainNo ratings yet
- EC334 Microcontrollers Lab-Manual FinalDocument52 pagesEC334 Microcontrollers Lab-Manual FinalSanjid ElahiNo ratings yet
- Mitsubishi FB16Document67 pagesMitsubishi FB16Lada LabusNo ratings yet
- Ih61x-Mhs & Ih61y-Mhs & Ih61z-Mhs & Ih61w-Mhs - Bios - 140402Document31 pagesIh61x-Mhs & Ih61y-Mhs & Ih61z-Mhs & Ih61w-Mhs - Bios - 140402Walter Romero ramosNo ratings yet
- Power Analysis On DCAT Traction Power Supply System For DC RailwaysDocument5 pagesPower Analysis On DCAT Traction Power Supply System For DC RailwaysZennure YenerNo ratings yet
- INgles Tecnico 1Document13 pagesINgles Tecnico 1frikitrakiNo ratings yet
- Danny Curriculum VitaeDocument4 pagesDanny Curriculum Vitaedanny.katongolaNo ratings yet
- Q4 M7 Electrcity and Magnetism 1Document30 pagesQ4 M7 Electrcity and Magnetism 1kliz TanNo ratings yet
- Hall Effect SensorsDocument13 pagesHall Effect SensorsPallavi Kammaje Seetharam100% (1)
- More Vacuum TubesDocument2 pagesMore Vacuum TubesJoseGarciaRuizNo ratings yet
- Body DTC Summaries: Quick Reference Diagnostic GuideDocument34 pagesBody DTC Summaries: Quick Reference Diagnostic GuideMiguel CarrilloNo ratings yet
- ECT TH April 2019 PDFDocument16 pagesECT TH April 2019 PDFJuan Miguel G. RubionNo ratings yet
- Scintillation DetectorsDocument19 pagesScintillation Detectorsazamnada299No ratings yet
- 181la Operation ManualDocument25 pages181la Operation ManualJOHNY MORALESNo ratings yet
- Satellite Office PC InfoDocument6 pagesSatellite Office PC InfoJulian LecetivoNo ratings yet
- Lvac SLDDocument1 pageLvac SLDbyjuvcNo ratings yet
- Trafo-1 Test ReportDocument16 pagesTrafo-1 Test ReportramNo ratings yet
- Service Manual BodylabDocument77 pagesService Manual BodylabDaniel Martinez CollazoNo ratings yet














































































































Download as pdf or txt
You might also like
- Checklist Testing and Inspection With Interconnection-Version 1 0 August 2015Document32 pagesChecklist Testing and Inspection With Interconnection-Version 1 0 August 2015jayapalNo ratings yet
- Sensors and Transducers: Mechatronics - Unit 1, Chapter 2Document41 pagesSensors and Transducers: Mechatronics - Unit 1, Chapter 2Vinay KNo ratings yet
- B-Stad CH 02Document27 pagesB-Stad CH 02posktovaNo ratings yet
- Measure of Angular VelocityDocument12 pagesMeasure of Angular VelocityAshley_Rulzzzzzzz100% (2)
- Rajshahi University of Engineering &technologyDocument4 pagesRajshahi University of Engineering &technologyদিব্যজয় পালNo ratings yet
- A New Generation of Contactless Magnetic Position SensorsDocument7 pagesA New Generation of Contactless Magnetic Position SensorsGautham SidharthNo ratings yet
- ICS Lab ManualDocument28 pagesICS Lab Manualashok_abclNo ratings yet
- Danaher Encoder HandbookDocument16 pagesDanaher Encoder HandbookatifkhushnoodNo ratings yet
- Position and Velocity Measurement by Optical Shaft EncodersDocument31 pagesPosition and Velocity Measurement by Optical Shaft EncodersVinit PatelNo ratings yet
- Encoder (Lab 2)Document15 pagesEncoder (Lab 2)brasengan6No ratings yet
- Encoder SDocument8 pagesEncoder SpanchalabNo ratings yet
- Question Bank - Unit VDocument5 pagesQuestion Bank - Unit Vjames RNo ratings yet
- I Am Sharing 'Speed Measurement' With You PDFDocument24 pagesI Am Sharing 'Speed Measurement' With You PDFYASH VERMANo ratings yet
- Rapport InductosynDocument13 pagesRapport InductosynHemant SavlaNo ratings yet
- Displacement and PositionDocument6 pagesDisplacement and PositioncoolhemakumarNo ratings yet
- MSD AssignmentDocument16 pagesMSD AssignmentNanda KishoreNo ratings yet
- Speed Measurement CH 1Document42 pagesSpeed Measurement CH 1unknown730407No ratings yet
- Digital TachometerDocument12 pagesDigital TachometerHariniNo ratings yet
- 3D Motion Tracking With Gyroscope and Accelerometer - 2Document26 pages3D Motion Tracking With Gyroscope and Accelerometer - 2Widji SantosoNo ratings yet
- Dhanalakshmi Srinivasan Institute of Technology - Trichy: ME8501 Metrology and Measurement Iii MechanicalDocument39 pagesDhanalakshmi Srinivasan Institute of Technology - Trichy: ME8501 Metrology and Measurement Iii MechanicalPio CasmirNo ratings yet
- Assignment 1Document9 pagesAssignment 1Alimin AnniNo ratings yet
- Optical Encoder For Motion Control Through ArduinoDocument4 pagesOptical Encoder For Motion Control Through ArduinoMary LongNo ratings yet
- Da3 QPDocument20 pagesDa3 QPsfdsjkgeifkNo ratings yet
- Sensor PDFDocument8 pagesSensor PDFConstanzaNo ratings yet
- What Are Rotary Encoders Used ForDocument11 pagesWhat Are Rotary Encoders Used ForjackNo ratings yet
- Introduction To MEMS GyroscopesDocument16 pagesIntroduction To MEMS GyroscopesErik GutiérrezNo ratings yet
- Magnet Selection GuideDocument26 pagesMagnet Selection GuideJosé AdenilsonNo ratings yet
- An Electronic Water Meter Design Using MSP430F41xDocument13 pagesAn Electronic Water Meter Design Using MSP430F41xrsrtnjNo ratings yet
- C T I /O D: Hapter WO Nput Utput EvicesDocument21 pagesC T I /O D: Hapter WO Nput Utput EvicesMohamed OmarNo ratings yet
- SA QB Solved Unit 1-2Document26 pagesSA QB Solved Unit 1-2Kundan PednekarNo ratings yet
- Module - 4 Digital and Intelligent Sensors: Position EncodersDocument23 pagesModule - 4 Digital and Intelligent Sensors: Position EncodersJnanavi B ANo ratings yet
- PLC Chapter 2 Input-Out DevicesDocument21 pagesPLC Chapter 2 Input-Out DevicesANIK Kumar SannasiNo ratings yet
- Arduino UnoDocument11 pagesArduino UnoNirav DsouzaNo ratings yet
- PIC NotesDocument17 pagesPIC Notessvyas7872No ratings yet
- Speed SensorsDocument8 pagesSpeed Sensorsajd.nanthakumarNo ratings yet
- Types of Sensors With Their Circuit Diagrams: What Is Sensor?Document48 pagesTypes of Sensors With Their Circuit Diagrams: What Is Sensor?dereje gerluNo ratings yet
- Unit 5 Displacement, Velocity and Acceleration MeasurementDocument26 pagesUnit 5 Displacement, Velocity and Acceleration Measurementbhuyanuttam7No ratings yet
- Digital Encoders 1.2Document6 pagesDigital Encoders 1.2controlorNo ratings yet
- DC Motors: Motor (ECM or EC Motor) and Synchronous DC Motors, AreDocument21 pagesDC Motors: Motor (ECM or EC Motor) and Synchronous DC Motors, AreAhmed SayedNo ratings yet
- Lab ManualsDocument61 pagesLab ManualsLavankumar MudirajNo ratings yet
- TachometerDocument17 pagesTachometerAmrita MitraNo ratings yet
- Describe The Construction of A Electromagnetic Velocity Sensor and Explain Its WorkingDocument8 pagesDescribe The Construction of A Electromagnetic Velocity Sensor and Explain Its WorkingJiten Thakur100% (1)
- Sensors and ActuatorsDocument13 pagesSensors and Actuatorssushanta Kumar ReddyNo ratings yet
- 11N407-Sensors and Transducers Lab ManualDocument74 pages11N407-Sensors and Transducers Lab ManualrameswariNo ratings yet
- Iot Module 2Document12 pagesIot Module 2nagaraj pNo ratings yet
- 1.) RESISTIVE SENSORS: The Resistive Sensors Can Be Defined As The Resistance of A Sensor Can BeDocument3 pages1.) RESISTIVE SENSORS: The Resistive Sensors Can Be Defined As The Resistance of A Sensor Can BeSanjana SehrawatNo ratings yet
- Measurements Lecture 9Document12 pagesMeasurements Lecture 9Aliaa TarekNo ratings yet
- Vehicle Electrical GaugesDocument13 pagesVehicle Electrical GaugesSimon Mwangi kabauNo ratings yet
- 01 EncoderDocument4 pages01 EncoderAngel ChicchonNo ratings yet
- System1 Plots - Machinery-Diagnostic - Part1Document16 pagesSystem1 Plots - Machinery-Diagnostic - Part1Thyagaraju PalisettyNo ratings yet
- Sensor: Microsensor Reaches A Significantly Higher Speed and Sensitivity Compared WithDocument7 pagesSensor: Microsensor Reaches A Significantly Higher Speed and Sensitivity Compared WithMaratur RoifahNo ratings yet
- Types of Transducers and Their Applications: Instrumentation and Product TestingDocument31 pagesTypes of Transducers and Their Applications: Instrumentation and Product TestingFemi PrinceNo ratings yet
- Theory of Operation of Rate SensorsDocument4 pagesTheory of Operation of Rate SensorsPhạm Ngọc HòaNo ratings yet
- Heart Rate MonitorDocument31 pagesHeart Rate Monitorζοβαγεπ ἯοΣΣαῖη100% (2)
- Servo Encoder LabDocument8 pagesServo Encoder LabGoran MiljkovicNo ratings yet
- Welcome To International Journal of Engineering Research and Development (IJERD)Document8 pagesWelcome To International Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- U2 ISA MinorDocument44 pagesU2 ISA MinorjeyrajiNo ratings yet
- Hall-Effect Sensors: Theory and ApplicationFrom EverandHall-Effect Sensors: Theory and ApplicationRating: 5 out of 5 stars5/5 (1)
- Handbook of Mechanical and Materials EngineeringFrom EverandHandbook of Mechanical and Materials EngineeringRating: 5 out of 5 stars5/5 (4)
- Position Sensing: Angle and Distance Measurement for EngineersFrom EverandPosition Sensing: Angle and Distance Measurement for EngineersNo ratings yet
- Coriolis Mass Flow Measuring System-Description of Device FunctionsDocument198 pagesCoriolis Mass Flow Measuring System-Description of Device FunctionssalemNo ratings yet
- Unleashing The Power of Valve Automation EUDocument2 pagesUnleashing The Power of Valve Automation EUsalemNo ratings yet
- FoodDocument3 pagesFoodsalemNo ratings yet
- Honeywell Annual Report2009Document124 pagesHoneywell Annual Report2009salemNo ratings yet
- Pws - Photovoltaic Solar Power PlantsDocument3 pagesPws - Photovoltaic Solar Power PlantssalemNo ratings yet
- SmartWireless Solutions For FieldDocument32 pagesSmartWireless Solutions For FieldsalemNo ratings yet
- Emerson Natural Gas Pressure and Flow Control SolutionsDocument6 pagesEmerson Natural Gas Pressure and Flow Control SolutionssalemNo ratings yet
- Subsea BrochureDocument4 pagesSubsea BrochuresalemNo ratings yet
- Fisher FIELDVUE DVC6000 Natural Gas CertDocument4 pagesFisher FIELDVUE DVC6000 Natural Gas CertsalemNo ratings yet
- Fisher® Easy-Drive™ Electric ActuatorsDocument4 pagesFisher® Easy-Drive™ Electric ActuatorssalemNo ratings yet
- DL8000 Preset Controller - For Measuring The Loading of Liquid Hydrocarbons Into Transporting TankersDocument8 pagesDL8000 Preset Controller - For Measuring The Loading of Liquid Hydrocarbons Into Transporting Tankerssalem100% (1)
- Most Asked Coding QUESTIONSDocument30 pagesMost Asked Coding QUESTIONSsalemNo ratings yet
- Rosemount Measurement SolutionsDocument48 pagesRosemount Measurement SolutionssalemNo ratings yet
- 795X Flow Computers For The Gas IndustryDocument6 pages795X Flow Computers For The Gas IndustrysalemNo ratings yet
- Triple - IR Flame DetectorDocument4 pagesTriple - IR Flame DetectorsalemNo ratings yet
- 795X Liquid Flow Computers For The Oil and Refined Products IndustryDocument8 pages795X Liquid Flow Computers For The Oil and Refined Products IndustrysalemNo ratings yet
- UV - IR H2 Flame DetectorDocument4 pagesUV - IR H2 Flame DetectorsalemNo ratings yet
- Dan PacDocument4 pagesDan PacsalemNo ratings yet
- Roxar Sand ManagementDocument5 pagesRoxar Sand ManagementsalemNo ratings yet
- ECO Sense H2S Gas DetectorDocument2 pagesECO Sense H2S Gas DetectorsalemNo ratings yet
- Mercury Removal ProcessesDocument10 pagesMercury Removal ProcessessalemNo ratings yet
- Pressure Measurement Part2Document7 pagesPressure Measurement Part2salemNo ratings yet
- OSHA Compliance Manual - Application of Key OSHA TopicsDocument1,138 pagesOSHA Compliance Manual - Application of Key OSHA TopicssalemNo ratings yet
- Measurement GuidelinesDocument57 pagesMeasurement GuidelinessalemNo ratings yet
- ATO PWM Solar Charge Controller User ManualDocument1 pageATO PWM Solar Charge Controller User ManualCuenta De RespaldoNo ratings yet
- m3310.093 Mg15cfx Mg30cfx Mg50cfx Mg101cfx Mg102cfx Mg100hfxm3310.093 Mg15cfx Mg30cfx Mg50cfx Mg101cfx Mg102cfx Mg100hfxDocument8 pagesm3310.093 Mg15cfx Mg30cfx Mg50cfx Mg101cfx Mg102cfx Mg100hfxm3310.093 Mg15cfx Mg30cfx Mg50cfx Mg101cfx Mg102cfx Mg100hfxRaphael BarbozaNo ratings yet
- Manual Transferencia Automática Edificio ATS-01 PDFDocument22 pagesManual Transferencia Automática Edificio ATS-01 PDFAlberto Jaime50% (2)
- Abdullah Project ReportDocument15 pagesAbdullah Project ReportHafiz AbdullahNo ratings yet
- Pci2Pmc: Dynamic EngineeringDocument15 pagesPci2Pmc: Dynamic EngineeringSteven YangNo ratings yet
- Bipolar Junction Transistor: ELAC 223/221L Electronics 1Document25 pagesBipolar Junction Transistor: ELAC 223/221L Electronics 1Sepillo RandelNo ratings yet
- 2.1 LPC2129 Microcontroller: 2.1.1 FeaturesDocument14 pages2.1 LPC2129 Microcontroller: 2.1.1 FeaturesBhaskar Rao PNo ratings yet
- Component 1Document5 pagesComponent 1Ha FaiazNo ratings yet
- Physics Projects-2Document13 pagesPhysics Projects-2Gracy RajoraNo ratings yet
- Mei Cashflow SC / SC Advance Operation & Maintenance ManualDocument14 pagesMei Cashflow SC / SC Advance Operation & Maintenance ManualNosce Te IpsumNo ratings yet
- MANUAL KGK INK JET - Hardware PDFDocument247 pagesMANUAL KGK INK JET - Hardware PDFDidot KobainNo ratings yet
- EC334 Microcontrollers Lab-Manual FinalDocument52 pagesEC334 Microcontrollers Lab-Manual FinalSanjid ElahiNo ratings yet
- Mitsubishi FB16Document67 pagesMitsubishi FB16Lada LabusNo ratings yet
- Ih61x-Mhs & Ih61y-Mhs & Ih61z-Mhs & Ih61w-Mhs - Bios - 140402Document31 pagesIh61x-Mhs & Ih61y-Mhs & Ih61z-Mhs & Ih61w-Mhs - Bios - 140402Walter Romero ramosNo ratings yet
- Power Analysis On DCAT Traction Power Supply System For DC RailwaysDocument5 pagesPower Analysis On DCAT Traction Power Supply System For DC RailwaysZennure YenerNo ratings yet
- INgles Tecnico 1Document13 pagesINgles Tecnico 1frikitrakiNo ratings yet
- Danny Curriculum VitaeDocument4 pagesDanny Curriculum Vitaedanny.katongolaNo ratings yet
- Q4 M7 Electrcity and Magnetism 1Document30 pagesQ4 M7 Electrcity and Magnetism 1kliz TanNo ratings yet
- Hall Effect SensorsDocument13 pagesHall Effect SensorsPallavi Kammaje Seetharam100% (1)
- More Vacuum TubesDocument2 pagesMore Vacuum TubesJoseGarciaRuizNo ratings yet
- Body DTC Summaries: Quick Reference Diagnostic GuideDocument34 pagesBody DTC Summaries: Quick Reference Diagnostic GuideMiguel CarrilloNo ratings yet
- ECT TH April 2019 PDFDocument16 pagesECT TH April 2019 PDFJuan Miguel G. RubionNo ratings yet
- Scintillation DetectorsDocument19 pagesScintillation Detectorsazamnada299No ratings yet
- 181la Operation ManualDocument25 pages181la Operation ManualJOHNY MORALESNo ratings yet
- Satellite Office PC InfoDocument6 pagesSatellite Office PC InfoJulian LecetivoNo ratings yet
- Lvac SLDDocument1 pageLvac SLDbyjuvcNo ratings yet
- Trafo-1 Test ReportDocument16 pagesTrafo-1 Test ReportramNo ratings yet
- Service Manual BodylabDocument77 pagesService Manual BodylabDaniel Martinez CollazoNo ratings yet