Download as pdf or txt
You might also like
- 2 - Kingery - Introduction To Ceramics PDFDocument522 pages2 - Kingery - Introduction To Ceramics PDFAndrea Prado88% (24)
- Three Approaches To ProbabilityDocument6 pagesThree Approaches To Probabilitymashur60% (5)
- Stats Tools PackageDocument44 pagesStats Tools PackageMuhammad Asif Khan100% (1)
- Probability DistributionsDocument29 pagesProbability DistributionsPranav MishraNo ratings yet
- QTDM AssignmentDocument24 pagesQTDM AssignmentHarsha NagabhushanNo ratings yet
- 3.6: General Hypothesis TestsDocument6 pages3.6: General Hypothesis Testssound05No ratings yet
- Normal DistributionDocument12 pagesNormal DistributionDaniela CaguioaNo ratings yet
- Basic Concepts of Ergodic TheoryDocument8 pagesBasic Concepts of Ergodic TheoryiavicennaNo ratings yet
- Bernoulli Random Variables in N DimensionsDocument40 pagesBernoulli Random Variables in N DimensionsM MovNo ratings yet
- Lec10 PDFDocument21 pagesLec10 PDFSriram MuruganNo ratings yet
- A (Very) Brief Review of Statistical Inference: 1 Some PreliminariesDocument9 pagesA (Very) Brief Review of Statistical Inference: 1 Some PreliminarieswhatisnameNo ratings yet
- Notes On Business StatsDocument23 pagesNotes On Business StatsKripal Singh RathodNo ratings yet
- Binomial DistributionDocument4 pagesBinomial Distributionapi-140032165No ratings yet
- Poisson DistributionDocument6 pagesPoisson DistributionconnorcollingwoodNo ratings yet
- Practical Data Science: Basic Concepts of ProbabilityDocument5 pagesPractical Data Science: Basic Concepts of ProbabilityRioja Anna MilcaNo ratings yet
- Statistics ReviewDocument16 pagesStatistics ReviewAlan BatschauerNo ratings yet
- Theoretical Minimum Notes IIDocument119 pagesTheoretical Minimum Notes IIMarcos FernándezNo ratings yet
- Chi SquareDocument35 pagesChi SquarePravab DhakalNo ratings yet
- Mathematics For Computer ApplicationDocument4 pagesMathematics For Computer ApplicationalokpandeygenxNo ratings yet
- Physics 115A: Statistical Physics: Prof. Clare Yu Email: Cyu@uci - Edu Phone: 949-824-6216 Office: 210E RH Fall 2013Document12 pagesPhysics 115A: Statistical Physics: Prof. Clare Yu Email: Cyu@uci - Edu Phone: 949-824-6216 Office: 210E RH Fall 2013Mahendra SankhuaNo ratings yet
- What Is Probability?Document8 pagesWhat Is Probability?Aar VeeNo ratings yet
- CH 6 - ProbabilityDocument7 pagesCH 6 - ProbabilityhehehaswalNo ratings yet
- Notes01 PDFDocument9 pagesNotes01 PDFhabtemariam mollaNo ratings yet
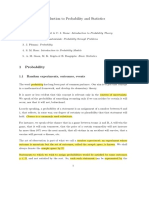
- Introduction To Probability and Statistics: 1.1 Random Experiments, Outcomes, EventsDocument8 pagesIntroduction To Probability and Statistics: 1.1 Random Experiments, Outcomes, EventsShreetama BhattacharyaNo ratings yet
- Probability Handout PART3Document9 pagesProbability Handout PART3Scarlet leeNo ratings yet
- Downloadartificial Intelligence - Unit 3Document20 pagesDownloadartificial Intelligence - Unit 3blazeNo ratings yet
- Discrete Probability DistributionsDocument5 pagesDiscrete Probability DistributionsAzimNo ratings yet
- Random VariablesDocument6 pagesRandom VariablesChitta ShivaNo ratings yet
- Discrete Probability DistributionsDocument4 pagesDiscrete Probability DistributionsSheena Mae Noga100% (1)
- Lecture 5: Statistical Independence, Discrete Random VariablesDocument4 pagesLecture 5: Statistical Independence, Discrete Random VariablesDesmond SeahNo ratings yet
- Engineering Data Analysis Probability: Probability Is A Measure Quantifying The Likelihood That Events Will OccurDocument8 pagesEngineering Data Analysis Probability: Probability Is A Measure Quantifying The Likelihood That Events Will OccurCharlotte FerriolNo ratings yet
- 7370-Statistics ProjectDocument17 pages7370-Statistics ProjectHareishNo ratings yet
- Statistical Basis and Classical Statistics - OrganizedDocument10 pagesStatistical Basis and Classical Statistics - OrganizedRujal KundhareNo ratings yet
- Chap 06Document26 pagesChap 06Giancarlo Libreros LondoñoNo ratings yet
- Probability Probability Distribution Function Probability Density Function Random Variable Bayes' Rule Gaussian DistributionDocument26 pagesProbability Probability Distribution Function Probability Density Function Random Variable Bayes' Rule Gaussian Distributionskumar165No ratings yet
- 11.3 Convergence TestDocument24 pages11.3 Convergence TestShebhere LuyandaNo ratings yet
- Construction of RDocument11 pagesConstruction of RdeviiserNo ratings yet
- Seeing TheoryDocument66 pagesSeeing TheoryJohn AvgerinosNo ratings yet
- Statistical Methods in Quality ManagementDocument71 pagesStatistical Methods in Quality ManagementKurtNo ratings yet
- 4.08 The Binomial Distribution: 4 Probability DistributionsDocument2 pages4.08 The Binomial Distribution: 4 Probability DistributionsKavya GopakumarNo ratings yet
- 6 Monte Carlo Simulation: Exact SolutionDocument10 pages6 Monte Carlo Simulation: Exact SolutionYuri PazaránNo ratings yet
- Republic of The Philippines Tarlac State University College of Engineering and Technology Tarlac CityDocument6 pagesRepublic of The Philippines Tarlac State University College of Engineering and Technology Tarlac CityRicardo O. Casimiro Jr.No ratings yet
- Lec 37Document20 pagesLec 37Kofi Appiah-DanquahNo ratings yet
- RRL M10Document9 pagesRRL M10GLADY VIDALNo ratings yet
- Evidence 2.1 2.3Document10 pagesEvidence 2.1 2.3alan ErivesNo ratings yet
- Theory of ProbabilityDocument9 pagesTheory of ProbabilityShibu Kumar SNo ratings yet
- The Run TestDocument15 pagesThe Run TestNelica RotoniNo ratings yet
- Module 4 - Fundamentals of ProbabilityDocument50 pagesModule 4 - Fundamentals of ProbabilitybindewaNo ratings yet
- Chương Dãy Và Chu I. Bài 3Document24 pagesChương Dãy Và Chu I. Bài 3Hiếu NguyễnNo ratings yet
- Information Loss in Black Holes And/Or Conscious Beings?Document10 pagesInformation Loss in Black Holes And/Or Conscious Beings?Eduardo GallardoNo ratings yet
- Binomial, Poisson & Normal DistributionDocument38 pagesBinomial, Poisson & Normal DistributionArun MishraNo ratings yet
- Unit+16 T TestDocument35 pagesUnit+16 T Testmathurakshay99No ratings yet
- Department of Mathematics Indian Institute of Technology, Kharagpur Module No. #01 Lecture No. #39 Testing of Hypothesis-VIIDocument17 pagesDepartment of Mathematics Indian Institute of Technology, Kharagpur Module No. #01 Lecture No. #39 Testing of Hypothesis-VIIKofi Appiah-DanquahNo ratings yet
- Probability NotesDocument35 pagesProbability NotessimonextraNo ratings yet
- Saharon Shelah - Zero One Laws For Graphs With Edge Probabilities Decaying With Distance. Part 1Document42 pagesSaharon Shelah - Zero One Laws For Graphs With Edge Probabilities Decaying With Distance. Part 1JtyhmfNo ratings yet
- Probability DistributionDocument69 pagesProbability DistributionAwasthi Shivani75% (4)
- Probability ThesisDocument4 pagesProbability Thesisnawei27No ratings yet
- Do Do Trong KH P - Adic Don GianDocument24 pagesDo Do Trong KH P - Adic Don GiandmtriNo ratings yet
- Probability Theory - CountingDocument8 pagesProbability Theory - Countingakulah13579No ratings yet
- Mathematical Foundations of Information TheoryFrom EverandMathematical Foundations of Information TheoryRating: 3.5 out of 5 stars3.5/5 (9)
- Simple Theorems in The Algebra of SetsDocument2 pagesSimple Theorems in The Algebra of Setsdaniel656No ratings yet
- Modes of Convergence (Annotated Index)Document5 pagesModes of Convergence (Annotated Index)daniel656No ratings yet
- Measure (Mathematics)Document8 pagesMeasure (Mathematics)daniel656No ratings yet
- Set TheoryDocument12 pagesSet Theorydaniel656No ratings yet
- Convergence of Random VariablesDocument7 pagesConvergence of Random Variablesdaniel656No ratings yet
- RandomnessDocument11 pagesRandomnessdaniel656No ratings yet
- Mutual ExclusivityDocument3 pagesMutual Exclusivitydaniel656No ratings yet
- Law of Total ProbabilityDocument3 pagesLaw of Total Probabilitydaniel656No ratings yet
- Venn DiagramDocument6 pagesVenn Diagramdaniel656No ratings yet
- Frequentist ProbabilityDocument6 pagesFrequentist Probabilitydaniel656No ratings yet
- Random ElementDocument5 pagesRandom Elementdaniel656No ratings yet
- Probability MeasureDocument3 pagesProbability Measuredaniel656No ratings yet
- Complementary EventDocument2 pagesComplementary Eventdaniel656No ratings yet
- Random VariableDocument13 pagesRandom Variabledaniel656No ratings yet
- Independence (Probability Theory)Document5 pagesIndependence (Probability Theory)daniel656No ratings yet
- Bayes' TheoremDocument16 pagesBayes' Theoremdaniel656No ratings yet
- Conditional IndependenceDocument4 pagesConditional Independencedaniel656No ratings yet
- Borel-Cantelli LemmaDocument6 pagesBorel-Cantelli Lemmadaniel656No ratings yet
- Kolmogorov's Zero-One LawDocument2 pagesKolmogorov's Zero-One Lawdaniel656No ratings yet
- Conditional Event AlgebraDocument5 pagesConditional Event Algebradaniel656No ratings yet
- Conditional ExpectationDocument7 pagesConditional Expectationdaniel656No ratings yet
- Reverse Engineering ReportDocument4 pagesReverse Engineering Reportapi-359551163No ratings yet
- Lectura Ingles Grado 5ºDocument3 pagesLectura Ingles Grado 5ºEdinson Prado MurilloNo ratings yet
- Extra NumericalsDocument2 pagesExtra NumericalsDeep KambleNo ratings yet
- Sig Decomp MproxDocument60 pagesSig Decomp MproxOri CarmiNo ratings yet
- Datasheet LTH-1550-01Document4 pagesDatasheet LTH-1550-01AntonellaBogadoNo ratings yet
- Very-Low-Speed Variable-Structure Control of Sensor Less Axial Flux Permanent Magnet Synchronous Motor Using An Advanced Rotor Flux ConceptDocument9 pagesVery-Low-Speed Variable-Structure Control of Sensor Less Axial Flux Permanent Magnet Synchronous Motor Using An Advanced Rotor Flux ConceptDEBARATI DAMNo ratings yet
- Lo2012 TPFDocument114 pagesLo2012 TPFramjoceNo ratings yet
- ODME FailureDocument3 pagesODME FailureNatalie JonesNo ratings yet
- 14th Jan 330pm NuptialsDocument30 pages14th Jan 330pm Nuptialsvivsubs18No ratings yet
- Ar Prda 2018 - FinalDocument37 pagesAr Prda 2018 - FinalucokNo ratings yet
- Analysis and Optimization of Spiral Plate Heat Exchanger Using Computational Fluid DynamicsDocument10 pagesAnalysis and Optimization of Spiral Plate Heat Exchanger Using Computational Fluid DynamicsIJRASETPublicationsNo ratings yet
- Moteggia Fracture and Dislocation: Presented By: Dr. Siddharth Dubey Moderator: Prof. H.L. Nag Co-Moderator: Dr. VaibhavDocument70 pagesMoteggia Fracture and Dislocation: Presented By: Dr. Siddharth Dubey Moderator: Prof. H.L. Nag Co-Moderator: Dr. VaibhavdidiNo ratings yet
- 8fe8c95c08fa432b6352Document14 pages8fe8c95c08fa432b6352Harry keenNo ratings yet
- Ebook Ebook PDF Principles of Human Physiology 6th Edition PDFDocument41 pagesEbook Ebook PDF Principles of Human Physiology 6th Edition PDFdonita.nichols650100% (43)
- Solve System of Equations Using GraphingDocument42 pagesSolve System of Equations Using Graphingapi-265481804No ratings yet
- Daddy On Duty Crescent Cove Book 12 by TarynDocument259 pagesDaddy On Duty Crescent Cove Book 12 by TarynMonalisa Ngqulana100% (3)
- Chemistry Project PDFDocument30 pagesChemistry Project PDFyash hiraniNo ratings yet
- Metabolit SekunderDocument76 pagesMetabolit SekunderCempaka Kusuma DewiNo ratings yet
- The Effect of Elevated Temperature On ConcreteDocument204 pagesThe Effect of Elevated Temperature On Concretexaaabbb_550464353100% (1)
- Monterey Garden Insect Spray: Directions For UseDocument6 pagesMonterey Garden Insect Spray: Directions For Usejoe leeNo ratings yet
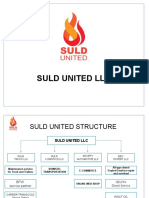
- Suld United PPT2020.09Document31 pagesSuld United PPT2020.09Ulstuguldur Kh.No ratings yet
- SMA 2370 - CALCULUS IV - Main Campus-PRINTREADYDocument3 pagesSMA 2370 - CALCULUS IV - Main Campus-PRINTREADYEVANS KIPNGETICHNo ratings yet
- Flow Simulation Report Square Nozzle 3-1 InchDocument18 pagesFlow Simulation Report Square Nozzle 3-1 InchVianAlwiNo ratings yet
- Portuguese Market Outlook Up To 2040: A Report To APRENDocument48 pagesPortuguese Market Outlook Up To 2040: A Report To APRENMiguel Chã AlmeidaNo ratings yet
- Technoir Players GuideDocument16 pagesTechnoir Players GuideDerrick D. Cochran100% (1)
- Anh 7 Kim Hien Unit 7Document8 pagesAnh 7 Kim Hien Unit 7Hiếu Nguyễn MinhNo ratings yet
- Phy CIA 2mDocument25 pagesPhy CIA 2mA/E5LOGESH AKRNo ratings yet
- Sika Retarder: Retarding Admixture For ConcretesDocument2 pagesSika Retarder: Retarding Admixture For ConcretesJean Marie NgaskaNo ratings yet