Download as pdf or txt
You might also like
- Test Bank For Exploring Microsoft Office Excel 2016 Comprehensive 1st EditionDocument19 pagesTest Bank For Exploring Microsoft Office Excel 2016 Comprehensive 1st Editionselinajonathanry0qsNo ratings yet
- Sinapsi HR Management SystemDocument22 pagesSinapsi HR Management SystemDoru CuroşuNo ratings yet
- Analog To Digital ConversionDocument81 pagesAnalog To Digital ConversionUmang PatelNo ratings yet
- Peak Reading Voltmeter: +Vp +Vp +Vp Vp π 2 π ωt Vp π 2 π ωt ωt +VpDocument30 pagesPeak Reading Voltmeter: +Vp +Vp +Vp Vp π 2 π ωt Vp π 2 π ωt ωt +VpAbhinav GuptaNo ratings yet
- Analog-To-Digital Conversion Btech IIIDocument50 pagesAnalog-To-Digital Conversion Btech IIILisa BhagatNo ratings yet
- For More Visit WWW - Ktunotes.in: Sensor TechnologyDocument21 pagesFor More Visit WWW - Ktunotes.in: Sensor TechnologyVISHAL MUKUNDANNo ratings yet
- Digital-to-Analog Analog-to-Digital: Dr. Syed Faiz AhmedDocument69 pagesDigital-to-Analog Analog-to-Digital: Dr. Syed Faiz AhmedmuraliNo ratings yet
- Unit 2 - MicroprocessorDocument16 pagesUnit 2 - MicroprocessorsenthilNo ratings yet
- Electronic Analog MetersDocument25 pagesElectronic Analog MetersAbhinav GuptaNo ratings yet
- Lab Design and Analysis of Active CS and Cascode AmplifierDocument3 pagesLab Design and Analysis of Active CS and Cascode AmplifierAzure HereNo ratings yet
- Sensors Dan ActuatorDocument21 pagesSensors Dan ActuatorMarsius SihombingNo ratings yet
- TRANSMITTERSDocument35 pagesTRANSMITTERSgagandeepsinghgxdNo ratings yet
- Adc and Dac by MMDocument31 pagesAdc and Dac by MMnatnael demissieNo ratings yet
- The Art of Instrumentation & Vibration Analysis: Back To The Basics - Forward To The FutureDocument64 pagesThe Art of Instrumentation & Vibration Analysis: Back To The Basics - Forward To The Futureanuram66No ratings yet
- Analog To Digital ConvertorDocument77 pagesAnalog To Digital ConvertorDarshan ValaNo ratings yet
- Sensors and TransducersDocument35 pagesSensors and TransducersAniket100% (1)
- Analog Circuit Testing: - Test Problems - Basic Components / Parameters - Test MethodsDocument132 pagesAnalog Circuit Testing: - Test Problems - Basic Components / Parameters - Test MethodsSri SaiNo ratings yet
- 5 Op-Amp Applications2Document35 pages5 Op-Amp Applications2vixoxo2289No ratings yet
- Analog Sensor InterfacingDocument5 pagesAnalog Sensor Interfacingkokolanski100% (1)
- EEE 6aDocument42 pagesEEE 6aAisha JainNo ratings yet
- Chapter 4.1 Signal ConditioningDocument34 pagesChapter 4.1 Signal ConditioningmathewosNo ratings yet
- Lab Report Temperature TransmitterDocument12 pagesLab Report Temperature Transmitterathira sNo ratings yet
- Intro Process Xmitters (Suresh)Document33 pagesIntro Process Xmitters (Suresh)sreeyukthaNo ratings yet
- Analog To Digital ConverterDocument11 pagesAnalog To Digital ConverterFf Fr100% (1)
- Data ConvertersDocument20 pagesData ConvertersAbdul Razaque MagsiNo ratings yet
- LSC Presentation: Topic:-Dual Slope A/D ConvertorDocument8 pagesLSC Presentation: Topic:-Dual Slope A/D ConvertorSatyakam JhaNo ratings yet
- Lecture 2BDocument25 pagesLecture 2BMano KaranNo ratings yet
- Analog To Digital ConversionDocument27 pagesAnalog To Digital Conversionnguyenphuonghuy1979No ratings yet
- Lec 4Document51 pagesLec 4yahia mohamedNo ratings yet
- Lecture 18 Data AcquisitionDocument58 pagesLecture 18 Data AcquisitionMohan Ruban0% (1)
- Document CTDocument88 pagesDocument CTdlj1988No ratings yet
- Sensor Encoder PDFDocument10 pagesSensor Encoder PDFDaniel SuarezNo ratings yet
- 8-Bit Level Crossing ADCDocument31 pages8-Bit Level Crossing ADCAnilguptaNo ratings yet
- Performance Characteristics of SensorsDocument23 pagesPerformance Characteristics of SensorslinkayessNo ratings yet
- LED DimmerDocument29 pagesLED Dimmerpra_zara2637No ratings yet
- EEN11, Finals CombinedDocument105 pagesEEN11, Finals CombinedlavadiajhonNo ratings yet
- Een 11 Finals Lec1Document46 pagesEen 11 Finals Lec1lavadiajhonNo ratings yet
- Analog To Digital & Digital To Analog ConvertersDocument66 pagesAnalog To Digital & Digital To Analog ConvertersSai Krishna Kodali100% (1)
- Chapter 3 - Measurement Case StudiesDocument15 pagesChapter 3 - Measurement Case StudiesfarizahNo ratings yet
- Teknik Konversi Data (Data Conversion) : Pendidikan Vokasional Mekatronika FT UnmDocument40 pagesTeknik Konversi Data (Data Conversion) : Pendidikan Vokasional Mekatronika FT UnmYuli Adhaning TyasNo ratings yet
- Digital To Analog: R R D V 2R DDocument13 pagesDigital To Analog: R R D V 2R DRudra MishraNo ratings yet
- Digital SignalsDocument45 pagesDigital SignalsDotNo ratings yet
- Chapter4 AnalogDocument48 pagesChapter4 AnalogOsman AtamNo ratings yet
- Intro To Instrumentation - 2024Document32 pagesIntro To Instrumentation - 2024prithyushrNo ratings yet
- Enerchip Energy Processor For Energy Harvesting ApplicationsDocument16 pagesEnerchip Energy Processor For Energy Harvesting Applicationsachew911No ratings yet
- Sensors and ActuatorsDocument31 pagesSensors and ActuatorsDhiraj MahajanNo ratings yet
- Voltage Control of InvertersDocument38 pagesVoltage Control of InvertersSindhujaSindhu100% (3)
- Adc Dac LectureDocument6 pagesAdc Dac LectureShawn SagarNo ratings yet
- Lecture 2 SlidesDocument32 pagesLecture 2 SlidesBadaboody TVNo ratings yet
- Bosch Cj120Document7 pagesBosch Cj120Thiago BronoskiNo ratings yet
- DEPT Lab Question2Document10 pagesDEPT Lab Question2Mostofa Al MuradNo ratings yet
- TransducersDocument36 pagesTransducersAnurag JoshiNo ratings yet
- Chapter 4Document23 pagesChapter 4Tejan Kumar SharmaNo ratings yet
- Boolean Algebra & Signal ConditioningDocument59 pagesBoolean Algebra & Signal Conditioningnaughty dela cruzNo ratings yet
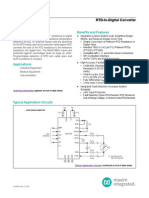
- Max 31865Document26 pagesMax 31865Renato CostaNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 02 KljuceviDocument26 pages02 KljuceviEkwere Wilfred UdohNo ratings yet
- A Review of Low-Temperature Plasma-Assisted Machining: From Mechanism To ApplicationDocument19 pagesA Review of Low-Temperature Plasma-Assisted Machining: From Mechanism To ApplicationArvind BhosaleNo ratings yet
- M.E (2019 PATTERN) - Part1Document5 pagesM.E (2019 PATTERN) - Part1Arvind BhosaleNo ratings yet
- Multi-Phase-Field Approach To Fracture Demonstrating The Role of Solid-Solid Interface Energy On Crack PropagationDocument13 pagesMulti-Phase-Field Approach To Fracture Demonstrating The Role of Solid-Solid Interface Energy On Crack PropagationArvind BhosaleNo ratings yet
- Experiment No 7-MQCDocument7 pagesExperiment No 7-MQCArvind Bhosale100% (1)
- Calibration of Measuring Instrument: Experiment No: 3 DateDocument4 pagesCalibration of Measuring Instrument: Experiment No: 3 DateArvind BhosaleNo ratings yet
- Experiment 4Document3 pagesExperiment 4Arvind BhosaleNo ratings yet
- Calibration of Measuring Instrument: Experiment No: 3 DateDocument4 pagesCalibration of Measuring Instrument: Experiment No: 3 DateArvind BhosaleNo ratings yet
- Development of TQM in Steel Manufacturers' Production: KeywordsDocument8 pagesDevelopment of TQM in Steel Manufacturers' Production: Keywordsdede_xNo ratings yet
- Experiment 4Document3 pagesExperiment 4Arvind BhosaleNo ratings yet
- Principios de MetrologiaDocument4 pagesPrincipios de MetrologiaJonatan BuitragoNo ratings yet
- University of Pune: T.E. (Mechanical) - 2012 Course Metrology and Quality Control (302044)Document3 pagesUniversity of Pune: T.E. (Mechanical) - 2012 Course Metrology and Quality Control (302044)Arvind BhosaleNo ratings yet
- Engineering Metrology and MeasurementsDocument128 pagesEngineering Metrology and MeasurementsArvind Bhosale100% (7)
- BME Unit IV Machine ToolsDocument41 pagesBME Unit IV Machine ToolsArvind BhosaleNo ratings yet
- ExtrusionDocument26 pagesExtrusionArvind BhosaleNo ratings yet
- BME Unit V ThermodynamicsDocument22 pagesBME Unit V ThermodynamicsArvind Bhosale100% (3)
- Bolted PlatesDocument13 pagesBolted PlatesDan WolfNo ratings yet
- A Comparison Study of Solid State Transformers Using Different Switching TechniquesDocument5 pagesA Comparison Study of Solid State Transformers Using Different Switching TechniquesIjsrnet EditorialNo ratings yet
- 2021-05-05 Coffee With PrincipalDocument29 pages2021-05-05 Coffee With PrincipalValerie PadillaNo ratings yet
- A Quick Tour of Python: Amey Karkare Dept. of CSE IIT KanpurDocument124 pagesA Quick Tour of Python: Amey Karkare Dept. of CSE IIT KanpurAbhishemNo ratings yet
- Hypertext, Hipermedia and MultimediaDocument7 pagesHypertext, Hipermedia and MultimediaOskarin HernandezNo ratings yet
- GSM Based Circuit Breaker For Electric LDocument63 pagesGSM Based Circuit Breaker For Electric LSiva KumarNo ratings yet
- Eeng410/Infe410 - Microprocessors I Final Exam: Let P 0 For N 0 To 7 Ifbitnofbis1 Then P P + (Shift Left A by N Bits)Document2 pagesEeng410/Infe410 - Microprocessors I Final Exam: Let P 0 For N 0 To 7 Ifbitnofbis1 Then P P + (Shift Left A by N Bits)alihalawaNo ratings yet
- Featup - A Model-Agnostic Framework For Features at Any ResolutionDocument27 pagesFeatup - A Model-Agnostic Framework For Features at Any Resolutionbicim22808No ratings yet
- Unified Payments InterfaceDocument3 pagesUnified Payments Interfacevishwaharini56No ratings yet
- Air Quality Prediction Based On Machine LearningDocument5 pagesAir Quality Prediction Based On Machine Learningsreya.sreejith2211No ratings yet
- Manthena Reverif PDFDocument3 pagesManthena Reverif PDFSRIVIDYALAYA OLYMPIADNo ratings yet
- 01-153 Rear Window Heating Electrical Testing PDFDocument5 pages01-153 Rear Window Heating Electrical Testing PDFmefisto06cNo ratings yet
- Experiencing MIS 2016Document18 pagesExperiencing MIS 2016Kushal PandeNo ratings yet
- U-2 Microsoft Word Notes EnglishDocument3 pagesU-2 Microsoft Word Notes EnglishLõvê ÜhhNo ratings yet
- Libro ZengDocument350 pagesLibro ZengNose NoseNo ratings yet
- Stamping Press - WikipediaDocument3 pagesStamping Press - Wikipediakirthi83No ratings yet
- Internship Report (11504725) PDFDocument39 pagesInternship Report (11504725) PDFpreetiNo ratings yet
- Gfi Max MP Ldap GuideDocument16 pagesGfi Max MP Ldap GuideicedgoblinNo ratings yet
- Design of Mini Compressorless Solar Powered Refrigerator: Project Report ONDocument36 pagesDesign of Mini Compressorless Solar Powered Refrigerator: Project Report ONJeevan Landge PatilNo ratings yet
- LTE System OverviewDocument3 pagesLTE System OverviewPrince AmaNo ratings yet
- Lm80-p0436-51 Apq8016 Processor Design GuidelinesDocument86 pagesLm80-p0436-51 Apq8016 Processor Design GuidelinesGustavo FélixNo ratings yet
- UMTS Optimization GuidelineDocument84 pagesUMTS Optimization GuidelineEvelio Sotolongo100% (3)
- Job PortalDocument2 pagesJob PortalLataben100% (7)
- Caepipe: Tutorial For Modeling and Results Review Problem 2Document93 pagesCaepipe: Tutorial For Modeling and Results Review Problem 2FRANCISCONo ratings yet
- SAP Contoh SoalDocument28 pagesSAP Contoh SoalArifin SantosoNo ratings yet
- Excel Functions FormulasDocument20 pagesExcel Functions FormulasisaacNo ratings yet
- Power BIDocument14 pagesPower BIGấu BearNo ratings yet
- ET Creen Eries User's Guide: P/N 093-1698-000 Rev. DDocument66 pagesET Creen Eries User's Guide: P/N 093-1698-000 Rev. DMehdi Al MassiriNo ratings yet
- Easy Way DL ProcessDocument6 pagesEasy Way DL ProcessBalboa JonesNo ratings yet