Download as pdf or txt
You might also like
- Alternative Approaches For Utilizing Lidar Data As A Source of Control Information For Photogrammetric ModelsDocument6 pagesAlternative Approaches For Utilizing Lidar Data As A Source of Control Information For Photogrammetric ModelsKobalt von KriegerischbergNo ratings yet
- Remote Sensing: An Easy-To-Use Airborne Lidar Data Filtering Method Based On Cloth SimulationDocument22 pagesRemote Sensing: An Easy-To-Use Airborne Lidar Data Filtering Method Based On Cloth SimulationDavid Duque AriasNo ratings yet
- Adaptive Slope Filtering of Airborne LiDAR Data inDocument16 pagesAdaptive Slope Filtering of Airborne LiDAR Data inPalash DasNo ratings yet
- Segmentation of Point Clouds Using Smoothness ConstraintDocument6 pagesSegmentation of Point Clouds Using Smoothness Constraint李玉哲No ratings yet
- 63 PDFDocument6 pages63 PDFJasorsi GhoshNo ratings yet
- Classification of Airborne 3D Point Clouds Regarding Separation of Vegetation in Complex EnvironmentsDocument15 pagesClassification of Airborne 3D Point Clouds Regarding Separation of Vegetation in Complex EnvironmentsGabriel RaamonNo ratings yet
- Seamless Fusion of Lidar and Aerial Imagery For Building ExtractionDocument15 pagesSeamless Fusion of Lidar and Aerial Imagery For Building ExtractioninthethroesNo ratings yet
- tgrs12 Hebel StillaDocument17 pagestgrs12 Hebel StillaGlmNo ratings yet
- Isprs Archives XLI B3 567 2016Document8 pagesIsprs Archives XLI B3 567 2016henri joel jrNo ratings yet
- Boresight Calibration of Mobile Mapping SystemsDocument10 pagesBoresight Calibration of Mobile Mapping SystemsDacianMNo ratings yet
- Remote Sensing: Comparison of The Selected State-Of-The-Art 3D Indoor Scanning and Point Cloud Generation MethodsDocument26 pagesRemote Sensing: Comparison of The Selected State-Of-The-Art 3D Indoor Scanning and Point Cloud Generation MethodsVICTOR PEREZNo ratings yet
- 3DCP Conference Liu Final SubmissionDocument8 pages3DCP Conference Liu Final Submissionmike mikeNo ratings yet
- Methods For Estimating Relative AccDocument12 pagesMethods For Estimating Relative Acccarlosbeltran.programacionNo ratings yet
- Solid Modeling Through Reverse EngineeringDocument7 pagesSolid Modeling Through Reverse EngineeringTony StarkNo ratings yet
- 1 s2.0 S0303243421001367 MainDocument11 pages1 s2.0 S0303243421001367 MainFijo MjNo ratings yet
- Aerial Images and Lidar Data Fusion For Disaster Change DetectionDocument6 pagesAerial Images and Lidar Data Fusion For Disaster Change DetectionKhalandar BashaNo ratings yet
- Photogrammetric Model Orientation Using Lidar Dataset: Mitishita) @Document6 pagesPhotogrammetric Model Orientation Using Lidar Dataset: Mitishita) @Jatin PandeyNo ratings yet
- Accurate 3D Point Cloud Comparison Lague Et Al - Revised With Figures Feb2013Document28 pagesAccurate 3D Point Cloud Comparison Lague Et Al - Revised With Figures Feb2013Andrei TaranuNo ratings yet
- Photogrammetric Point Clouds Generation in Urban ADocument7 pagesPhotogrammetric Point Clouds Generation in Urban ANUR AINA BINTI MOHD AZLAN JAMALNo ratings yet
- Terrestrial Laser Scanning For Deformation MonitoringDocument10 pagesTerrestrial Laser Scanning For Deformation MonitoringajoceaNo ratings yet
- 3 Automated Reconstruction of Walls From Airborne LIDAR Data For Complete 3D Building ModellingDocument6 pages3 Automated Reconstruction of Walls From Airborne LIDAR Data For Complete 3D Building ModellingsaheelmoonNo ratings yet
- bk978 0 7503 2524 0ch3Document42 pagesbk978 0 7503 2524 0ch3Shadi AtriNo ratings yet
- Sensors 12 12814Document22 pagesSensors 12 12814Magno RegisNo ratings yet
- Accuracy Time Cost and Terrain Independence ComparDocument9 pagesAccuracy Time Cost and Terrain Independence Comparluis.quiroz.bNo ratings yet
- Genetic and ICP Laser Point Matching For 2D Mobile Robot Motion EstimationDocument23 pagesGenetic and ICP Laser Point Matching For 2D Mobile Robot Motion EstimationhenrydclNo ratings yet
- Matching Algorithm of 3D Point Clouds Based On Multiscale Features and Covariance Matrix DescriptorsDocument13 pagesMatching Algorithm of 3D Point Clouds Based On Multiscale Features and Covariance Matrix DescriptorsDr. Chekir AmiraNo ratings yet
- Zhao Et Al. - 2019 - Robust Normal Estimation For 3D LiDAR Point Clouds in Urban EnvironmentsDocument17 pagesZhao Et Al. - 2019 - Robust Normal Estimation For 3D LiDAR Point Clouds in Urban Environmentsgopal91carpenter_515No ratings yet
- KNP07 QuadCoverDocument10 pagesKNP07 QuadCoverFer FloresNo ratings yet
- 2022-Kamaruzzaman-Significance of Geometrical Condition in Preserving The Quality of Tls MeasurementDocument7 pages2022-Kamaruzzaman-Significance of Geometrical Condition in Preserving The Quality of Tls Measurementnurnazuraabdrazak97No ratings yet
- Terrestrial Laser Scanning PHD ThesisDocument4 pagesTerrestrial Laser Scanning PHD Thesistammibuschnorman100% (2)
- Improvements in Radar Observing Capabilities: Mtech (DC), BMSCEDocument32 pagesImprovements in Radar Observing Capabilities: Mtech (DC), BMSCEVivekananda HkNo ratings yet
- Sensor Integration For Improved Surface ModelingDocument4 pagesSensor Integration For Improved Surface ModelingalihahgfdNo ratings yet
- Iterative 3D Laser FormingDocument10 pagesIterative 3D Laser Formingasit_kgpNo ratings yet
- Manuscript Revised RGDocument24 pagesManuscript Revised RGcyberyogi07No ratings yet
- Recognition of Lane BordersDocument19 pagesRecognition of Lane BordersWilson ArteagaNo ratings yet
- Robust Detection of Surface Anomaly Using Lidar Point Cloud With IntensityDocument8 pagesRobust Detection of Surface Anomaly Using Lidar Point Cloud With IntensityHolman Latorre BossaNo ratings yet
- Comparison of Methods For Outlier Identification in Surface CharacterizationDocument15 pagesComparison of Methods For Outlier Identification in Surface CharacterizationMolo DembéléNo ratings yet
- Marshall Joshua A. 2016 Two Dimensional Axis MappingDocument10 pagesMarshall Joshua A. 2016 Two Dimensional Axis MappingSaadNo ratings yet
- Fast Range Image Segmentation and SmoothDocument6 pagesFast Range Image Segmentation and Smoothstarvz95No ratings yet
- Niemeyer 2014Document14 pagesNiemeyer 2014akuba393939No ratings yet
- Forlani 2012Document7 pagesForlani 2012zulham sugitoNo ratings yet
- Mesh Segmentation Via Spectral Embedding and Contour AnalysisDocument10 pagesMesh Segmentation Via Spectral Embedding and Contour AnalysiscmaestrofdezNo ratings yet
- Theoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlFrom EverandTheoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlNo ratings yet
- Analysis of 3D Building Models Accuracy Based On TDocument8 pagesAnalysis of 3D Building Models Accuracy Based On TastudiroNo ratings yet
- Arun Patel Paper EgyptianDocument10 pagesArun Patel Paper EgyptianpdhurveyNo ratings yet
- Insar Dem Why It Is Better?Document8 pagesInsar Dem Why It Is Better?Percy PeraltaNo ratings yet
- Isprs Archives XLII 2 W3 339 2017Document6 pagesIsprs Archives XLII 2 W3 339 2017AmanNo ratings yet
- Mobile Lidar Mapping For 3D Point Cloud Collection in Urban Areas - A Performance TestDocument6 pagesMobile Lidar Mapping For 3D Point Cloud Collection in Urban Areas - A Performance TestDacianMNo ratings yet
- Phor 12296Document18 pagesPhor 12296Wulan Ratna MayangsariNo ratings yet
- Risky Pratama Susantio - Tugas Review 3Document11 pagesRisky Pratama Susantio - Tugas Review 3Risky PratamaNo ratings yet
- Precision Del Escaner LaserDocument9 pagesPrecision Del Escaner LaserMaria Soledad SoutoNo ratings yet
- Texture Features For Anti-Tank Landmine Detection Using Ground Penetrating RadarDocument44 pagesTexture Features For Anti-Tank Landmine Detection Using Ground Penetrating RadarAdarshmoothedathNo ratings yet
- Automatic Reconstruction of 3D CAD Models From Digital ScansDocument35 pagesAutomatic Reconstruction of 3D CAD Models From Digital Scansirinuca12No ratings yet
- Lecture 3 GisDocument20 pagesLecture 3 GislubisiatechsolutionsNo ratings yet
- Model Globally, Match Locally: Efficient and Robust 3D Object RecognitionDocument8 pagesModel Globally, Match Locally: Efficient and Robust 3D Object RecognitionBích Lâm NgọcNo ratings yet
- Title: Automatic Method Used For GeometricDocument3 pagesTitle: Automatic Method Used For GeometricsatoruheineNo ratings yet
- GRIN Aperture Filler 3 BeamsDocument9 pagesGRIN Aperture Filler 3 BeamsAngela OptixNo ratings yet
- Conditional Random Fields For Lidar Point Cloud cl1Document7 pagesConditional Random Fields For Lidar Point Cloud cl1DUVAN CAMILO GOMEZ PALACIOSNo ratings yet
- Efficient Triangular Surface Approximations Using Wavelets and Quadtree Data StructuresDocument18 pagesEfficient Triangular Surface Approximations Using Wavelets and Quadtree Data StructuresTache Alexandru-PetreNo ratings yet
- Ijgi 08 00044 v2Document18 pagesIjgi 08 00044 v2AudityaNo ratings yet
- AOCVDocument21 pagesAOCVRoshan RajuNo ratings yet
- Andrewdate 13Document4 pagesAndrewdate 13Roshan RajuNo ratings yet
- MBIST Verification Best Practices ChallengesDocument6 pagesMBIST Verification Best Practices ChallengesRoshan RajuNo ratings yet
- 222 - Using 211Document1 page222 - Using 211Roshan RajuNo ratings yet
- Ultra ScaleDocument13 pagesUltra ScaleRoshan RajuNo ratings yet
- CGPT FilterDocument1 pageCGPT FilterRoshan RajuNo ratings yet
- RISC V Instruction SetDocument15 pagesRISC V Instruction SetRoshan RajuNo ratings yet
- Cloud Computing BrochureDocument7 pagesCloud Computing BrochureRoshan RajuNo ratings yet
- Fpgas 29032016Document55 pagesFpgas 29032016Roshan RajuNo ratings yet
- MPQF 167 CDocument2 pagesMPQF 167 CRoshan RajuNo ratings yet
- Mechanism of Feature Learning in Deep Fully Connected Networks and Kernel Machines That Recursively Learn FeaturesDocument39 pagesMechanism of Feature Learning in Deep Fully Connected Networks and Kernel Machines That Recursively Learn FeaturesRoshan RajuNo ratings yet
- Fast Resource Sharing in VLSI RoutingDocument167 pagesFast Resource Sharing in VLSI RoutingRoshan RajuNo ratings yet
- BasicsDocument9 pagesBasicsRoshan RajuNo ratings yet
- FVF 8 HDocument7 pagesFVF 8 HRoshan RajuNo ratings yet
- UntitledDocument1 pageUntitledRoshan RajuNo ratings yet
- Zynq Ultrascale+ Architecture Stephanie Soldavini and Andrew RamseyDocument18 pagesZynq Ultrascale+ Architecture Stephanie Soldavini and Andrew RamseyRoshan RajuNo ratings yet
- Sta SyllabiDocument6 pagesSta SyllabiRoshan RajuNo ratings yet
- Sta InitDocument1 pageSta InitRoshan RajuNo ratings yet
- NLDMDocument2 pagesNLDMRoshan RajuNo ratings yet
- Coping With RCL Interconnect Design HeadachesDocument1 pageCoping With RCL Interconnect Design HeadachesRoshan RajuNo ratings yet
- Process Variation DriversDocument2 pagesProcess Variation DriversRoshan RajuNo ratings yet
- UntitledDocument1 pageUntitledRoshan RajuNo ratings yet
- Async Reset SynchronizationDocument2 pagesAsync Reset SynchronizationRoshan RajuNo ratings yet
- Random VariabilityDocument1 pageRandom VariabilityRoshan RajuNo ratings yet
- Self-Interference Cancellation For LTE-Compatible Full-Duplex SystemsDocument6 pagesSelf-Interference Cancellation For LTE-Compatible Full-Duplex SystemsRoshan RajuNo ratings yet
- When The Yogurt Took OverDocument3 pagesWhen The Yogurt Took OverRoshan RajuNo ratings yet
- Mbist SummaryDocument3 pagesMbist SummaryRoshan RajuNo ratings yet
- Ch3.fault ModelingDocument53 pagesCh3.fault ModelingRoshan RajuNo ratings yet
- SemiconductorDocument4 pagesSemiconductorRoshan RajuNo ratings yet
- Systemc NoteDocument1 pageSystemc NoteRoshan RajuNo ratings yet
- Calculation of Web Weld SizeDocument4 pagesCalculation of Web Weld Sizeperdhana2000No ratings yet
- Noise and Vibrations HVACDocument56 pagesNoise and Vibrations HVACBalasubramani vNo ratings yet
- PAROC Calculus: Calculation 1: Rectangular TankDocument2 pagesPAROC Calculus: Calculation 1: Rectangular Tankvipul gandhiNo ratings yet
- DS - PP4 - PI - 028 - 01 - Normal Tube - RevDocument2 pagesDS - PP4 - PI - 028 - 01 - Normal Tube - RevJiwoo A-TechNo ratings yet
- IsotopesworksheetDocument2 pagesIsotopesworksheetapi-233187566No ratings yet
- Lab 10 - Youngs Modulus - Rock Burst Liability IndexDocument7 pagesLab 10 - Youngs Modulus - Rock Burst Liability IndexankeshNo ratings yet
- Application of Plane Stress - Combined LoadingsDocument39 pagesApplication of Plane Stress - Combined LoadingsMuzammil HussainNo ratings yet
- Chap 03 Current Electricity (Revision Notes)Document18 pagesChap 03 Current Electricity (Revision Notes)Ayush ShawNo ratings yet
- Las 1 Particle Nature of MatterDocument4 pagesLas 1 Particle Nature of MatterzhiegenshinplayerNo ratings yet
- Wika Type 111.11Document2 pagesWika Type 111.11warehouse cikalongNo ratings yet
- Second Periodical Examination Mathematics 10 Name: - Grade/Section: - Date: - ScoreDocument2 pagesSecond Periodical Examination Mathematics 10 Name: - Grade/Section: - Date: - ScoreCris JakeNo ratings yet
- Philosophy Science and Method Essays in Honor of Ernest Nagel - Compress PDFDocument632 pagesPhilosophy Science and Method Essays in Honor of Ernest Nagel - Compress PDFAnonna JahanNo ratings yet
- Worksheet X AprilDocument3 pagesWorksheet X AprilAyushiNo ratings yet
- ANN PHYS-Wheeler-Physics Classical Is GeometryDocument79 pagesANN PHYS-Wheeler-Physics Classical Is GeometryAriel BorgesNo ratings yet
- 01 LANG Forgiarini Low Energy EmulsificationDocument8 pages01 LANG Forgiarini Low Energy EmulsificationDuvánE.DueñasLópezNo ratings yet
- Algebra Cheat Sheet: Basic Properties & FactsDocument4 pagesAlgebra Cheat Sheet: Basic Properties & FactsMahesh Daxini ThakkerNo ratings yet
- Differential Pressure Gauge Model 712.15.160, Copper Alloy Model 732.15.160, Stainless Steel VersionDocument11 pagesDifferential Pressure Gauge Model 712.15.160, Copper Alloy Model 732.15.160, Stainless Steel VersionNayan DudhatraNo ratings yet
- Fundamental Forces PDFDocument2 pagesFundamental Forces PDFemNo ratings yet
- Science Class 7 Mid TermDocument2 pagesScience Class 7 Mid TermbeakraamNo ratings yet
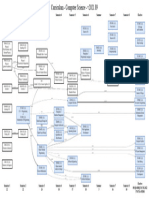
- Curriculum - Computer Science - v2021.89Document1 pageCurriculum - Computer Science - v2021.8927.Nguyễn Trung Nguyên 12a17No ratings yet
- LN-16 Aperture Antennas-1Document10 pagesLN-16 Aperture Antennas-1omar zanganaNo ratings yet
- Handbook of Single-Molecule Biophysics (HANDBOOK of SINGLE-MOLECULE BIOPHYSICS) by Hinterdorfer, Pe (PDFDrive)Document633 pagesHandbook of Single-Molecule Biophysics (HANDBOOK of SINGLE-MOLECULE BIOPHYSICS) by Hinterdorfer, Pe (PDFDrive)CG CorreaNo ratings yet
- The Design and Construction of A Single Screw ExtruderDocument10 pagesThe Design and Construction of A Single Screw ExtruderChandrasekarNo ratings yet
- 005a Movement ConceptsDocument2 pages005a Movement ConceptsMalej Đào KyblNo ratings yet
- Structural Analysis of Transmission Structures: 1.problem DescriptionDocument69 pagesStructural Analysis of Transmission Structures: 1.problem DescriptionMahesh ANo ratings yet
- TOS Sci8 1stQtrDocument5 pagesTOS Sci8 1stQtrARLENE DE JESUSNo ratings yet
- Lecture Industrial Robots - 2017 - FundamentalDocument53 pagesLecture Industrial Robots - 2017 - FundamentalĐình TrungNo ratings yet
- MODULE 1. Introduction To DynamicsDocument12 pagesMODULE 1. Introduction To DynamicsAron H Ocampo100% (1)
- An Application of FRP System For The Flexural Seismic Retrofit of Reinforced Concrete BeamsDocument13 pagesAn Application of FRP System For The Flexural Seismic Retrofit of Reinforced Concrete BeamsFernandoNo ratings yet
- Virtual Tape Machines 11Document23 pagesVirtual Tape Machines 11Sam GarciaNo ratings yet