Download as docx, pdf, or txt
You might also like
- Origin of Dance in The PhilippinesDocument9 pagesOrigin of Dance in The PhilippinesApril Joy Haro89% (9)
- CALLED FROM OBSCURITY: THE LIFE AND TIMES OF A TRUE SON OF TIBET GERGAN DORJE THARCHIN Vol.1Document618 pagesCALLED FROM OBSCURITY: THE LIFE AND TIMES OF A TRUE SON OF TIBET GERGAN DORJE THARCHIN Vol.1Ron Stalworth100% (1)
- Bomhard - Afrasian Comparative Phonology and VocabularyDocument393 pagesBomhard - Afrasian Comparative Phonology and VocabularyAllan Bomhard100% (1)
- Robotic Arm Packaging and ParrelitizingDocument12 pagesRobotic Arm Packaging and ParrelitizingAdeel Ahmad WattooNo ratings yet
- Lab SessionsDocument14 pagesLab SessionshamzatariqmirzaNo ratings yet
- Finalized Report Lab 1Document23 pagesFinalized Report Lab 1hanifNo ratings yet
- REPORT IA E1Document3 pagesREPORT IA E1Amirul NaimNo ratings yet
- Chapter 7 Robot and Other Motion Control SystemsDocument15 pagesChapter 7 Robot and Other Motion Control SystemsMohith SNo ratings yet
- rOBOTICS NOTESDocument14 pagesrOBOTICS NOTESdsathiya100% (4)
- 2017-IM-40 (Lab Seeesion 2)Document4 pages2017-IM-40 (Lab Seeesion 2)Muhammad Irfan AkramNo ratings yet
- Robot Training 2023 GETDocument17 pagesRobot Training 2023 GETVISHNUNo ratings yet
- ROBOTICS ReportDocument20 pagesROBOTICS ReportSagar KolkarNo ratings yet
- Design Analysis of A Remote Controlled P PDFDocument12 pagesDesign Analysis of A Remote Controlled P PDFVũ Mạnh CườngNo ratings yet
- Arm Robot (Scorbot ER-III) : A. IntroductionDocument3 pagesArm Robot (Scorbot ER-III) : A. IntroductionYehezkiel88No ratings yet
- Pick and Place Robotic Arm Controlled by Computer - TJ211.42.M52 2007 - Mohamed Naufal B. OmarDocument26 pagesPick and Place Robotic Arm Controlled by Computer - TJ211.42.M52 2007 - Mohamed Naufal B. OmarSAMNo ratings yet
- Hurt Locker-An Explosive Disposal Robot: International Journal of Ethics in Engineering & Management EducationDocument5 pagesHurt Locker-An Explosive Disposal Robot: International Journal of Ethics in Engineering & Management EducationKumar Goud.KNo ratings yet
- Automation and RoboticsDocument23 pagesAutomation and RoboticsvvipmembersNo ratings yet
- Active Robot Training ManualDocument114 pagesActive Robot Training ManualGuillermo Alejandro MontielNo ratings yet
- QB 114735Document11 pagesQB 114735Sravs JanumpallyNo ratings yet
- Robotic Arm Manipulation - MUGUNTHANDocument7 pagesRobotic Arm Manipulation - MUGUNTHANMugun ThanNo ratings yet
- The Maintenance Commissioning of FANUC M-1iA 05A TDocument6 pagesThe Maintenance Commissioning of FANUC M-1iA 05A TYoan RodriguezNo ratings yet
- DV04PUB11 Study GuideDocument5 pagesDV04PUB11 Study GuidetharNo ratings yet
- DEC50122 - PW5 (Procedure)Document5 pagesDEC50122 - PW5 (Procedure)keerthana murugeswaranNo ratings yet
- Introduction To Robotics: Analysis, Systems, ApplicationsDocument28 pagesIntroduction To Robotics: Analysis, Systems, ApplicationsFarhang NaderiNo ratings yet
- Modeling A Deburring Process, Using DELMIA V5: January 2010Document14 pagesModeling A Deburring Process, Using DELMIA V5: January 2010Carlos Henrique NascimentoNo ratings yet
- Unit 5Document21 pagesUnit 5Sarika MadugulaNo ratings yet
- Robotic Arm: Electronic & CommunicationDocument16 pagesRobotic Arm: Electronic & CommunicationDilipsinh DodiyaNo ratings yet
- E 5 Axis Arm Robot TrainerDocument401 pagesE 5 Axis Arm Robot TrainerPe Vande100% (1)
- B.E Mech Batchno 107Document57 pagesB.E Mech Batchno 107saravana murthyNo ratings yet
- Industrial Robotics-Unit 1Document34 pagesIndustrial Robotics-Unit 1tamilselvan nNo ratings yet
- Robotic ArmDocument10 pagesRobotic ArmAhmed AliNo ratings yet
- Design of A 5-Joint Mechanical Arm With UserFriendly Control ProgramDocument6 pagesDesign of A 5-Joint Mechanical Arm With UserFriendly Control ProgramEmad A.AhmadNo ratings yet
- Design and Development of A Robotic ArmDocument4 pagesDesign and Development of A Robotic ArmNazmul Shikder RiyadhNo ratings yet
- Wirelessroboticarm Vehicle: P. V. Rama Raju, G. Naga Raju, K. Venkat Vinay, M. Anil Kumar, K. Naga Manju, K. ManojDocument4 pagesWirelessroboticarm Vehicle: P. V. Rama Raju, G. Naga Raju, K. Venkat Vinay, M. Anil Kumar, K. Naga Manju, K. ManojNaga Raju GNo ratings yet
- Fire Fighter RobotDocument39 pagesFire Fighter RobotGautam GuptaNo ratings yet
- Design and Development of A Robotic ArmDocument5 pagesDesign and Development of A Robotic ArmAdvitiya SharmaNo ratings yet
- IAT0922 Industrial Robotics Chapter2 Rev4Document79 pagesIAT0922 Industrial Robotics Chapter2 Rev4visionNo ratings yet
- Komodo Manual v1.1Document24 pagesKomodo Manual v1.1Percy Wilianson Lovon RamosNo ratings yet
- Source CodeasdasDocument10 pagesSource CodeasdasNelson Javines QuiritNo ratings yet
- Chapter 1 - FundamentalsDocument29 pagesChapter 1 - FundamentalsPooja AngolkarNo ratings yet
- Introduction To ProductDocument18 pagesIntroduction To ProductYokuhoNo ratings yet
- 5 Axis Arm Robot TrainerDocument399 pages5 Axis Arm Robot TrainerTINDER USERNo ratings yet
- Programming A Fanuc Industrial Robot For Incremental Sheet FormingDocument11 pagesProgramming A Fanuc Industrial Robot For Incremental Sheet Forming501705016No ratings yet
- CH 4 - Industrial Robots in FMSDocument38 pagesCH 4 - Industrial Robots in FMSdejenem398No ratings yet
- Robotic Soldering ArmDocument53 pagesRobotic Soldering Armnihalmullaa100% (4)
- Project Report On Robotic ArmDocument8 pagesProject Report On Robotic Armpramo_dassNo ratings yet
- Expt. No.: ExperimentDocument5 pagesExpt. No.: ExperimentSwapnil DeyNo ratings yet
- Technical Jurnal For Engineering ProjectDocument7 pagesTechnical Jurnal For Engineering ProjectAshGhanesenNo ratings yet
- Position Control of 3-DOF Articulated Robot Arm Using PID ControllerDocument7 pagesPosition Control of 3-DOF Articulated Robot Arm Using PID ControllerJoker JkNo ratings yet
- Robotic Arm Dynamic and Simulation With Virtual Re PDFDocument7 pagesRobotic Arm Dynamic and Simulation With Virtual Re PDFALA SOUISSINo ratings yet
- Presentation-Educational Robotics-Stage 1Document21 pagesPresentation-Educational Robotics-Stage 1Luis Fernando Garza MendozaNo ratings yet
- Robotics NotesDocument61 pagesRobotics NotesMech HoD DAITNo ratings yet
- An Improved Accurate Hydraulic Robotic Arms: JournalDocument14 pagesAn Improved Accurate Hydraulic Robotic Arms: JournalIJMERNo ratings yet
- Servo Based 5 Axis Robotic Arm Project ReportDocument38 pagesServo Based 5 Axis Robotic Arm Project ReportRobo India100% (1)
- Amiga C Compiler Users Reference Guide - eBook-EnGDocument282 pagesAmiga C Compiler Users Reference Guide - eBook-EnGpanzerkingNo ratings yet
- IESLCoE Robotics-Assignment - 2Document11 pagesIESLCoE Robotics-Assignment - 2kavish malakaNo ratings yet
- Designand Developmentofa Robotic ArmDocument5 pagesDesignand Developmentofa Robotic Arm1DS20EE410 KalingNo ratings yet
- completeFinalReport SieDeenLauDocument28 pagescompleteFinalReport SieDeenLauNagababu RockzzNo ratings yet
- Robot ArmDocument13 pagesRobot ArmDevvrat DixitNo ratings yet
- AssignmentqDocument12 pagesAssignmentqDirajen PMNo ratings yet
- Kinematic of AdapthreeDocument19 pagesKinematic of AdapthreeBmn85No ratings yet
- How to buy and fly a quadcopter drone: a small guide and flight schoolFrom EverandHow to buy and fly a quadcopter drone: a small guide and flight schoolNo ratings yet
- Pharas Ram Rai - Denodo Admin - AutodeskDocument2 pagesPharas Ram Rai - Denodo Admin - Autodeskabdulafsar586No ratings yet
- Writing A Press ReleaseDocument2 pagesWriting A Press ReleasePradnya SalveNo ratings yet
- HUAWEI BTS3900 Hardware Structure and Principle-200903-IsSUE1.0-BDocument93 pagesHUAWEI BTS3900 Hardware Structure and Principle-200903-IsSUE1.0-Bkashf415100% (4)
- 7-кл.поур.4-quarter. jikaDocument262 pages7-кл.поур.4-quarter. jikaSounds of Nature100% (1)
- Equivalence Between Iso Standards and National StandardsDocument7 pagesEquivalence Between Iso Standards and National StandardsSelva KumarNo ratings yet
- WebbyDocument12 pagesWebbyapi-327832679No ratings yet
- 10th English PTA Model Question Papers 6 Sets 2023 2024Document24 pages10th English PTA Model Question Papers 6 Sets 2023 2024mralan9843No ratings yet
- LSRW Skills 26032023 062232pm 28092023 123513pmDocument22 pagesLSRW Skills 26032023 062232pm 28092023 123513pmumerraza0904No ratings yet
- Instrumental Case in RussianDocument5 pagesInstrumental Case in RussianJennifer LuLu1394No ratings yet
- E 3.de 4Document5 pagesE 3.de 4studyeeeeNo ratings yet
- Gr. 8 Islamic Education (WS)Document3 pagesGr. 8 Islamic Education (WS)Mirza Ali Akbar100% (1)
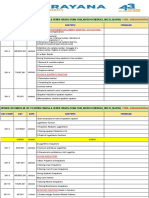
- Proposed Inc JR Iit Co Super Chaina & Super Chaina N120& N120 - Micro Schedule - 2022-23 (Code - Ashadam Bonalu)Document31 pagesProposed Inc JR Iit Co Super Chaina & Super Chaina N120& N120 - Micro Schedule - 2022-23 (Code - Ashadam Bonalu)Chakresh techNo ratings yet
- Principles For Understanding The Seerah (The Biography of The Prophet - Peace Be Upon Him) - Shaykh Saalih Aal Ush-Shaykh - Minister of Islamic Affairs, KSA.Document49 pagesPrinciples For Understanding The Seerah (The Biography of The Prophet - Peace Be Upon Him) - Shaykh Saalih Aal Ush-Shaykh - Minister of Islamic Affairs, KSA.MountainofknowledgeNo ratings yet
- Le1 Aio VG Ex4Document4 pagesLe1 Aio VG Ex4María MaesoNo ratings yet
- MDM 103HF1 BusinessEntityServicesGuide enDocument193 pagesMDM 103HF1 BusinessEntityServicesGuide enjeremy depazNo ratings yet
- PRAYER IN THE CHRISTIAN LIFEDocument18 pagesPRAYER IN THE CHRISTIAN LIFEcoffee bean100% (1)
- ScreamDocument4 pagesScreamannNo ratings yet
- Oral Communication Examination 2ND GradingDocument2 pagesOral Communication Examination 2ND GradingJocelleParcon83% (6)
- Manoj Sagoi Gurgaon 7.01 YrsDocument4 pagesManoj Sagoi Gurgaon 7.01 Yrskshitij712100% (1)
- LiouVille's TheoremDocument3 pagesLiouVille's TheoremMuhammad kawish iqbal100% (1)
- Edgar All An PoeDocument9 pagesEdgar All An PoeHABEEB FASASINo ratings yet
- Lesson 07 Data Manipulation With PandasDocument82 pagesLesson 07 Data Manipulation With PandasSumanta SinhatalNo ratings yet
- Palm OS Emulator: Excerpt From Palm OS Programming Development Tools GuideDocument182 pagesPalm OS Emulator: Excerpt From Palm OS Programming Development Tools GuideAlvaro Mez AlNo ratings yet
- Isd Lab02-SrsDocument10 pagesIsd Lab02-SrsTú PhạmNo ratings yet
- Level Three COC Exam Sample Type Questions DBMSDocument6 pagesLevel Three COC Exam Sample Type Questions DBMSsileshi alelign88% (16)
- NPC Shop CoreDocument23 pagesNPC Shop CoreSonic The HegdogsNo ratings yet
- Activity#3-Operations On SequencesDocument7 pagesActivity#3-Operations On SequencesAdrianne BastasaNo ratings yet