Download as pdf or txt
You might also like
- The Future of JournalismDocument4 pagesThe Future of JournalismHuy NguyenNo ratings yet
- Stalinist RepressionDocument540 pagesStalinist Repressioncountofmontecristo100% (4)
- Notes For The Exponential Function'Document3 pagesNotes For The Exponential Function'Rajdeep ChopdekarNo ratings yet
- Cholesky and LDL Decomposition: B X A N NDocument18 pagesCholesky and LDL Decomposition: B X A N Nmacynthia26No ratings yet
- Math644 - Chapter 1 - Part2 PDFDocument14 pagesMath644 - Chapter 1 - Part2 PDFaftab20No ratings yet
- Homework 2 SolDocument3 pagesHomework 2 SolMatondo ReubenNo ratings yet
- Maths 2 - L29 - Complex Integral, Contour Integral JIIT NoidaDocument12 pagesMaths 2 - L29 - Complex Integral, Contour Integral JIIT Noidarishagupta87502No ratings yet
- Manual EconometricsDocument20 pagesManual EconometricsmrrnahidNo ratings yet
- UntitledDocument4 pagesUntitled01 RerollNo ratings yet
- 2.160 Identification, Estimation, and Learning: End-of-Term ExaminationDocument3 pages2.160 Identification, Estimation, and Learning: End-of-Term ExaminationRahul Raveendran PillaiNo ratings yet
- 8.7: Parametric Equations: Learning ObjectivesDocument11 pages8.7: Parametric Equations: Learning ObjectivesShah Md. Asik Kabir 6044No ratings yet
- Solution For Semester 1 (2015 - 2016)Document4 pagesSolution For Semester 1 (2015 - 2016)Sun StarNo ratings yet
- Math 234, Practice Test #1Document4 pagesMath 234, Practice Test #1Adnan MehmoodNo ratings yet
- Unit1-Question Bank - 20210110233835Document4 pagesUnit1-Question Bank - 20210110233835DRUVA HegdeNo ratings yet
- Topic 2 Report Class Cc06 - Group 8Document12 pagesTopic 2 Report Class Cc06 - Group 8huy.nguyentan1704No ratings yet
- Study Questions - Applied Numerical Methods Part 1Document33 pagesStudy Questions - Applied Numerical Methods Part 1Folarin EmmanuelNo ratings yet
- Lab 10Document2 pagesLab 10phanhuynhdangkhoa9999No ratings yet
- Maths Practicesheet-01 - (Code-A) - Sol.Document9 pagesMaths Practicesheet-01 - (Code-A) - Sol.ksanthosh29112006No ratings yet
- Answer of Final (Spring 2018)Document6 pagesAnswer of Final (Spring 2018)Mohamed Salama Mohamed SalamaNo ratings yet
- Matrices&Determinants RLTDocument16 pagesMatrices&Determinants RLTRahul JunejaNo ratings yet
- 2023week8 PreDocument3 pages2023week8 PreNiroshan KarunarathnaNo ratings yet
- 1 Computation Questions: STA3002: Generalized Linear Models Spring 2023Document3 pages1 Computation Questions: STA3002: Generalized Linear Models Spring 2023Owen DengNo ratings yet
- Final 2014 WDocument4 pagesFinal 2014 WViệt NguyễnNo ratings yet
- UNIT 8 Geotechnical EngineeringDocument29 pagesUNIT 8 Geotechnical EngineeringrbhavishNo ratings yet
- PT-2 QP 2021-22 Set-QDocument5 pagesPT-2 QP 2021-22 Set-QGunjan MeshramNo ratings yet
- Two Asset Option PDE ADIDocument5 pagesTwo Asset Option PDE ADIwei ZhouNo ratings yet
- Sample Question PaperDocument6 pagesSample Question PaperDavidNo ratings yet
- Fem Intro2Document5 pagesFem Intro2Kurt CargoNo ratings yet
- Exercise 1: Derivation Question (20 Points) : EconometricsDocument4 pagesExercise 1: Derivation Question (20 Points) : EconometricsDaniel MarinhoNo ratings yet
- Tre Ci Kolokvij Iz Matematike II 2009./2010.: R Diferencijabilna Funkcija Dviju Varijabli., yDocument8 pagesTre Ci Kolokvij Iz Matematike II 2009./2010.: R Diferencijabilna Funkcija Dviju Varijabli., yTARELIC1802No ratings yet
- (Time: Hours) (Marks: 75) Please Check Whether You Have Got The Right Question PaperDocument16 pages(Time: Hours) (Marks: 75) Please Check Whether You Have Got The Right Question PaperTushar VazeNo ratings yet
- (Chapter 7) Solution To Examples in Chapter 3Document24 pages(Chapter 7) Solution To Examples in Chapter 3Bara ThiNo ratings yet
- CH 30Document12 pagesCH 30aNo ratings yet
- Lab Manual - MATLABDocument9 pagesLab Manual - MATLABSavan PatelNo ratings yet
- 03 - Mich - Solutions To Problem Set 1 - Ao319Document13 pages03 - Mich - Solutions To Problem Set 1 - Ao319albertwing1010No ratings yet
- Fiche N°2 - Chapitre 1Document2 pagesFiche N°2 - Chapitre 1Dimitri Valdes TchuindjangNo ratings yet
- Phd:304 Lab Report Advanced Mathematical Physics: Sachin Singh Rawat 16PH-06 (Department of Physics)Document12 pagesPhd:304 Lab Report Advanced Mathematical Physics: Sachin Singh Rawat 16PH-06 (Department of Physics)sachin rawatNo ratings yet
- Winter07 Rosen ReflectionsDocument10 pagesWinter07 Rosen ReflectionsSourav SahaNo ratings yet
- Consider The SystemDocument8 pagesConsider The Systemhoney arguellesNo ratings yet
- Tutorial 4: Determinants and Linear TransformationsDocument5 pagesTutorial 4: Determinants and Linear TransformationsJustin Del CampoNo ratings yet
- 12th Maths Exam Paper (2008-2012) FinalDocument430 pages12th Maths Exam Paper (2008-2012) FinalAdityas AravindNo ratings yet
- Mect4470 TH1Document4 pagesMect4470 TH1Ercan DenizNo ratings yet
- Sistem Persamaan Linear 2Document38 pagesSistem Persamaan Linear 2Gunawan RisdiyantoNo ratings yet
- Mathematics-I, Sem-I Practice Questions On All ModulesDocument12 pagesMathematics-I, Sem-I Practice Questions On All Modulesaditya2189rdNo ratings yet
- HMW1 PDFDocument11 pagesHMW1 PDFeduardolarangeiraNo ratings yet
- Clifford S AlgebraDocument90 pagesClifford S AlgebraJorgeGrajalesRivera100% (1)
- Skvortsov - Kozlov14 MM 4Document11 pagesSkvortsov - Kozlov14 MM 4elene shopovaNo ratings yet
- 02 2system of Circles 11-17Document3 pages02 2system of Circles 11-17eamcetmaterials100% (1)
- Lecture Notes: Determinant of A Square Matrix: Taoyf@cse - Cuhk.edu - HKDocument5 pagesLecture Notes: Determinant of A Square Matrix: Taoyf@cse - Cuhk.edu - HKDebashish PalNo ratings yet
- 007 - Buku Basic Econometric Damodar N Gujarati 4th Solution-15-25Document12 pages007 - Buku Basic Econometric Damodar N Gujarati 4th Solution-15-25Kurniawan ArikaNo ratings yet
- Performance of Differential Evolution Method in Least Squares Fitting of Some Typical Nonlinear CurvesDocument21 pagesPerformance of Differential Evolution Method in Least Squares Fitting of Some Typical Nonlinear CurvesCharlesDayanNo ratings yet
- CH 2Document31 pagesCH 2Hama arasNo ratings yet
- EAMCET 2013 Question Paper With Answer Keys and SolutionsDocument48 pagesEAMCET 2013 Question Paper With Answer Keys and SolutionsPremKumarKalikiri83% (6)
- Assignment NumericalDocument3 pagesAssignment NumericalRahul KumarNo ratings yet
- Exam EngMaths Sept10Document2 pagesExam EngMaths Sept10Donz MallawarachchiNo ratings yet
- THE Solutions: Calculus 3 2nd TESTDocument4 pagesTHE Solutions: Calculus 3 2nd TESTTran Duc TuanNo ratings yet
- De Moiver's Theorem (Trigonometry) Mathematics Question BankFrom EverandDe Moiver's Theorem (Trigonometry) Mathematics Question BankNo ratings yet
- Inverse Trigonometric Functions (Trigonometry) Mathematics Question BankFrom EverandInverse Trigonometric Functions (Trigonometry) Mathematics Question BankNo ratings yet
- Factoring and Algebra - A Selection of Classic Mathematical Articles Containing Examples and Exercises on the Subject of Algebra (Mathematics Series)From EverandFactoring and Algebra - A Selection of Classic Mathematical Articles Containing Examples and Exercises on the Subject of Algebra (Mathematics Series)No ratings yet
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Application of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsFrom EverandApplication of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Tutorial 1 Intro To PhotonicsDocument4 pagesTutorial 1 Intro To Photonicsamitgh88No ratings yet
- Lesson 10 - Week 2 PerdevDocument15 pagesLesson 10 - Week 2 PerdevChristian OconNo ratings yet
- Chapter 6 - ImplementationDocument8 pagesChapter 6 - ImplementationtadiwaNo ratings yet
- Prevalence and Determinants of Substance Use Among Students at Kampala International University Western Campus, Ishaka Municipality Bushenyi District UgandaDocument18 pagesPrevalence and Determinants of Substance Use Among Students at Kampala International University Western Campus, Ishaka Municipality Bushenyi District UgandaKIU PUBLICATION AND EXTENSIONNo ratings yet
- Pedrollo CK PumpsDocument4 pagesPedrollo CK Pumpsmail87523No ratings yet
- Certiport Exam Administration Policies: Examination SecurityDocument2 pagesCertiport Exam Administration Policies: Examination SecurityrajputamitdNo ratings yet
- A Z of Simple Living BookDocument68 pagesA Z of Simple Living Bookdrsubramanian100% (4)
- VLSI Interview QuestionsDocument41 pagesVLSI Interview QuestionsKarthik Real Pacifier0% (1)
- SCHOOL LetterDocument6 pagesSCHOOL LetterShecainah SagayaNo ratings yet
- Report On Seismic CodesDocument2 pagesReport On Seismic CodesLakshmiRaviChanduKolusuNo ratings yet
- Not All Mineral Oils Are Equal Exploring The History and Tech Behind Mineral Insulating OilsDocument6 pagesNot All Mineral Oils Are Equal Exploring The History and Tech Behind Mineral Insulating OilsJicheng PiaoNo ratings yet
- Ulla-Talvikki Virta Measuring Cycling Environment For Internet of Things ApplicationsDocument66 pagesUlla-Talvikki Virta Measuring Cycling Environment For Internet of Things ApplicationsNikola CmiljanicNo ratings yet
- Themes: Themes, Motifs and SymbolsDocument6 pagesThemes: Themes, Motifs and SymbolsTanu ManochaNo ratings yet
- Week7Advanced Materials Electronic MaterialsDocument16 pagesWeek7Advanced Materials Electronic Materialsmarlon corpuzNo ratings yet
- Science DLPDocument12 pagesScience DLPGaila Mae SanorjoNo ratings yet
- 2020 IYLEP Undergrad Letter of Recomendation PDFDocument3 pages2020 IYLEP Undergrad Letter of Recomendation PDFShara A. JalalNo ratings yet
- Johns Hopkins RFPDocument7 pagesJohns Hopkins RFPLucky 77No ratings yet
- Writing A Narrative EssayDocument6 pagesWriting A Narrative EssayBob BolNo ratings yet
- CTPaper IIDocument118 pagesCTPaper IIMahmoud MansourNo ratings yet
- Western CSSFORUM MergedDocument44 pagesWestern CSSFORUM MergedRana Umar HayyatNo ratings yet
- Diffraction On Bird Feather1Document4 pagesDiffraction On Bird Feather1Eny FachrijahNo ratings yet
- Welc OME..Document26 pagesWelc OME..Priya RamNo ratings yet
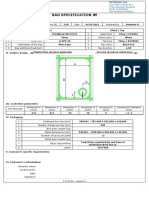
- Bag Specification 3LDocument1 pageBag Specification 3LBookWayNo ratings yet
- Verifier 300 LCDocument2 pagesVerifier 300 LCDarcantorNo ratings yet
- Resources - Job Application Form - Sample 2Document3 pagesResources - Job Application Form - Sample 2Aung Myo Thu LwinNo ratings yet
- B NilfiskDocument16 pagesB Nilfiskarjun0188No ratings yet
- E-Mail: Electronica@nsys - by Àêàäåìèê ÍÀÍ Áåëàðóñè, Äîêòîð Òåõíè÷åñêèõ Íàóê Êàíäèäàò Òåõíè÷åñêèõ Íàóê Êàíäèäàò Òåõíè÷åñêèõ Íàóê E-Mail: Vah@Document58 pagesE-Mail: Electronica@nsys - by Àêàäåìèê ÍÀÍ Áåëàðóñè, Äîêòîð Òåõíè÷åñêèõ Íàóê Êàíäèäàò Òåõíè÷åñêèõ Íàóê Êàíäèäàò Òåõíè÷åñêèõ Íàóê E-Mail: Vah@juraNo ratings yet
- LGU-Santa Maria CC2021Document35 pagesLGU-Santa Maria CC2021Alyssa Marie MartinezNo ratings yet