Download as pdf or txt
You might also like
- F-22A Raptor: Flight ManualDocument49 pagesF-22A Raptor: Flight ManualOusmaneNo ratings yet
- L39 UpgradeDocument24 pagesL39 UpgradeSilentistics100% (3)
- A-29 Super TucanoDocument14 pagesA-29 Super TucanoNelsonManuelRuiz100% (3)
- Dash8 Q400ManualDocument16 pagesDash8 Q400ManualCaptainchandan Chakravarthy100% (2)
- T.O. 1f-22a-1Document49 pagesT.O. 1f-22a-1Savage Masaru50% (2)
- 4 WB Group Uav TechnologyDocument48 pages4 WB Group Uav Technologycroffle.inNo ratings yet
- Short Range UavDocument40 pagesShort Range UavthiyagusaraNo ratings yet
- Aero L-159B Czech Jet Trainer AircraftDocument16 pagesAero L-159B Czech Jet Trainer AircraftSilentistics100% (2)
- European Military AircraftDocument204 pagesEuropean Military Aircraftjb2ookworm100% (2)
- Efd 4982 eDocument6 pagesEfd 4982 eОлег ПоборцевNo ratings yet
- Medium Lift Tactical Aircraft C-27J 2007Document45 pagesMedium Lift Tactical Aircraft C-27J 2007Mario Francisco75% (4)
- 1unmanned Aerial VehiclesDocument10 pages1unmanned Aerial VehiclesSherry SherNo ratings yet
- 01 History of AvionicsDocument37 pages01 History of AvionicsRikko PutraNo ratings yet
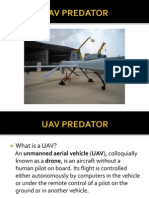
- Uav PredatorDocument10 pagesUav PredatorViperous PramodNo ratings yet
- Topic:-Unmanned Aerial Vehicles (Uavs)Document24 pagesTopic:-Unmanned Aerial Vehicles (Uavs)Akshay Singh100% (1)
- 2018 Dassault Falcon 8X N225DL S/N 8X-440 Specifications & SummaryDocument19 pages2018 Dassault Falcon 8X N225DL S/N 8X-440 Specifications & SummaryTesteArquivosNo ratings yet
- 2016 Gulfstream G650ER BrochureDocument37 pages2016 Gulfstream G650ER BrochureYeison ChavezNo ratings yet
- Aero L-159A Czech Jet Combat AircraftDocument16 pagesAero L-159A Czech Jet Combat AircraftSilentistics100% (1)
- UAV Specs PDFDocument12 pagesUAV Specs PDFMario Gómez Martínez100% (1)
- Armoured Patrol CarDocument24 pagesArmoured Patrol CarRanjith SriNo ratings yet
- Autonoumous Air Craft SystemDocument24 pagesAutonoumous Air Craft SystemMANDEEP REDDYNo ratings yet
- Unmanned Aircraft Systems Present & Future Capabilities: MJ G L Bli H Major General Blair Hansen 23 October 2009Document21 pagesUnmanned Aircraft Systems Present & Future Capabilities: MJ G L Bli H Major General Blair Hansen 23 October 2009Yaser NajafiNo ratings yet
- 2016 - Autonomous Takeoff and Landing of A QuadcoptDocument10 pages2016 - Autonomous Takeoff and Landing of A QuadcoptNaomi MendozaNo ratings yet
- Avionics - Afzal SirDocument29 pagesAvionics - Afzal SirgultusundoriNo ratings yet
- Viper JetDocument4 pagesViper JetJaafar Ali MohamadNo ratings yet
- Defense Technical Information Center Compilation Part NoticeDocument4 pagesDefense Technical Information Center Compilation Part NoticefuckscribNo ratings yet
- UAV EvolutionDocument8 pagesUAV EvolutionUAVs AustraliaNo ratings yet
- AW189 Energy ServicesDocument8 pagesAW189 Energy ServicesSiddiq NaslahNo ratings yet
- MQ9 Reaper Emerging (Assignment)Document7 pagesMQ9 Reaper Emerging (Assignment)Vaibhavi SinghNo ratings yet
- CH 09 Rotary WingDocument20 pagesCH 09 Rotary WingPGNo ratings yet
- Eurofighter Typhoon: DefinitionDocument3 pagesEurofighter Typhoon: Definitionbob martinNo ratings yet
- A Study of Reconnaissance Surveillance UAVDocument99 pagesA Study of Reconnaissance Surveillance UAVJacob Issa100% (1)
- 30mt Multi Purpose Vessel SpecDocument2 pages30mt Multi Purpose Vessel Specmariners123No ratings yet
- Body Brochure Aw189sarDocument8 pagesBody Brochure Aw189sarLee Jihoon100% (1)
- Helicopters Indian FinalistsDocument3 pagesHelicopters Indian FinalistsBharat TailorNo ratings yet
- What Is The Unmanned Aircraft System FinalDocument25 pagesWhat Is The Unmanned Aircraft System Finalfahal_zdn100% (9)
- Unmanned Aircraft Vehicle Uav in The RomDocument6 pagesUnmanned Aircraft Vehicle Uav in The RomSoumana IssoufiNo ratings yet
- LEONARDO Brochure CompressedDocument9 pagesLEONARDO Brochure CompressedEmmanuel Rei Zamora0% (1)
- Aermacchi M-345: The Next Generation TrainerDocument7 pagesAermacchi M-345: The Next Generation TrainerThallez0% (1)
- 2015 Jetcoast Global 6000 SN 9620 Complete June 2015Document20 pages2015 Jetcoast Global 6000 SN 9620 Complete June 2015airlanggaputra100% (1)
- Challenger 650Document14 pagesChallenger 650Saniya ShaikhNo ratings yet
- Performance Optimization of A Modified Let L-410 Turbolet UVP-E20Document14 pagesPerformance Optimization of A Modified Let L-410 Turbolet UVP-E20Dominic ChettiarNo ratings yet
- Flight Testing The X-36-The Test Pilot's PerspectiveDocument15 pagesFlight Testing The X-36-The Test Pilot's Perspectivebring it onNo ratings yet
- AW169 Private and Executive TransportDocument8 pagesAW169 Private and Executive Transportsabris snoussiNo ratings yet
- 60M FPVDocument4 pages60M FPVMyanmar CeleMediaNo ratings yet
- Discus-2C Freeware v2.0.0Document16 pagesDiscus-2C Freeware v2.0.0Jose Manuel MacíasNo ratings yet
- Hnlms Karel Doorman: Colossus-Class Aircraft CarrierDocument16 pagesHnlms Karel Doorman: Colossus-Class Aircraft CarrierCarlos LagioiaNo ratings yet
- CAAP Helipad ApprovalDocument117 pagesCAAP Helipad ApprovalJaymark EchanoNo ratings yet
- UavDocument19 pagesUavArvind KeesaraNo ratings yet
- Unit 1 Avionics ModifiedDocument127 pagesUnit 1 Avionics ModifiedparantnNo ratings yet
- 9261-Heliport Manual-Part 1 Heliport OffshoreDocument105 pages9261-Heliport Manual-Part 1 Heliport OffshorePierre CarvalhoNo ratings yet
- Border Eagle Mk-2: Border Sur Veillance Uav SystemDocument1 pageBorder Eagle Mk-2: Border Sur Veillance Uav SystemKiran Raghuram IyengarNo ratings yet
- Kong 2014Document8 pagesKong 2014robertoNo ratings yet
- CH 07 Air DefenseDocument38 pagesCH 07 Air DefensePGNo ratings yet
- Woii Sedegah DivineDocument69 pagesWoii Sedegah DivineAma Serwaa YeboahNo ratings yet
- Day2Session1Paper1 DCN GowindDocument17 pagesDay2Session1Paper1 DCN GowindZobair Ibn AwalNo ratings yet
- BAE Systems Type 31e Candidate DesignDocument2 pagesBAE Systems Type 31e Candidate DesignLiger30100% (1)
- Unmanned Aerial Vehicles As Tools For FoDocument11 pagesUnmanned Aerial Vehicles As Tools For FoMohammadUzairNo ratings yet
- SAAF's Border War: The South African Air Force in Combat 1966-89From EverandSAAF's Border War: The South African Air Force in Combat 1966-89Rating: 5 out of 5 stars5/5 (1)
- A330 Normal Law: Putting Fly-by-Wire Into PerspectiveFrom EverandA330 Normal Law: Putting Fly-by-Wire Into PerspectiveRating: 5 out of 5 stars5/5 (2)