
Chine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob Zahensky
Chine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob Zahensky
You might also like
- Flexible Pavement Design Calculation Spreadsheet According To AASHTODocument45 pagesFlexible Pavement Design Calculation Spreadsheet According To AASHTOMohammed AL-sharafi100% (2)
- Magnification QuestionsDocument4 pagesMagnification QuestionsSaima Syeda0% (1)
- Chine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyDocument1 pageChine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyIonut RabanNo ratings yet
- Chine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyDocument1 pageChine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyIonut RabanNo ratings yet
- Chine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyDocument1 pageChine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyIonut RabanNo ratings yet
- Chine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyDocument1 pageChine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyIonut RabanNo ratings yet
- Chine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyDocument1 pageChine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyIonut RabanNo ratings yet
- Project SampleDocument8 pagesProject SampleRamji RaoNo ratings yet
- Factored Reaction (W) Factored Tensile Force On The Plate W/2Document8 pagesFactored Reaction (W) Factored Tensile Force On The Plate W/2Sudhanshu Shekhar SinglaNo ratings yet
- F&S - Harvery 270deg LollipopDocument2 pagesF&S - Harvery 270deg LollipopRobotNo ratings yet
- Design Calculation of Pulley Belt DriveDocument8 pagesDesign Calculation of Pulley Belt Driveأحمد دعبس83% (6)
- Design Calculation of Gearbox: ST ND RD TH THDocument50 pagesDesign Calculation of Gearbox: ST ND RD TH THKaung KhantNo ratings yet
- Design of Base PlateDocument8 pagesDesign of Base Platemsiddiq1No ratings yet
- Factored Reaction (W) Factored Tensile Force On The Plate W/2Document9 pagesFactored Reaction (W) Factored Tensile Force On The Plate W/2Sudhanshu Shekhar SinglaNo ratings yet
- F&S - Harvery 300deg LollipopDocument2 pagesF&S - Harvery 300deg LollipopRobotNo ratings yet
- SolutionDocument35 pagesSolutionMariel MirafloresNo ratings yet
- Ball - Lead Screw Sizing Tool PDFDocument3 pagesBall - Lead Screw Sizing Tool PDFsero ghazarianNo ratings yet
- Ball - Lead Screw Sizing Tool PDFDocument3 pagesBall - Lead Screw Sizing Tool PDFsero ghazarianNo ratings yet
- Planetry GearsDocument10 pagesPlanetry Gearsvinu1175No ratings yet
- Chine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyDocument1 pageChine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyIonut RabanNo ratings yet
- Group 1 Gearbox Design ReportDocument15 pagesGroup 1 Gearbox Design Reportapi-598255067No ratings yet
- P5647-Structural Calculation-40m Monopole VCDocument54 pagesP5647-Structural Calculation-40m Monopole VCJesryl Arellano ArzadonNo ratings yet
- Engine History ReportDocument3 pagesEngine History Reportmarcolinna21No ratings yet
- Calculation AC-1 SunjinDocument3 pagesCalculation AC-1 SunjinJoulee NurimanNo ratings yet
- M 452 ContentDocument63 pagesM 452 ContentprasannaNo ratings yet
- Shafting CalculationsDocument4 pagesShafting Calculationsmohammad shihabNo ratings yet
- Lesson AGMA Standard - Example 1 & 2Document23 pagesLesson AGMA Standard - Example 1 & 2Sphumelele SibuthaNo ratings yet
- Design Calculation HandlingDocument51 pagesDesign Calculation HandlingArshad KhanNo ratings yet
- SolutionDocument4 pagesSolutionhaile mehari100% (1)
- Die CalculationsDocument13 pagesDie CalculationsDhinakaran R100% (1)
- Huawei Atr4518r13Document2 pagesHuawei Atr4518r13Carlos CostaNo ratings yet
- Important Hint: at Least One Warning Has Occurred During The CalculationDocument9 pagesImportant Hint: at Least One Warning Has Occurred During The CalculationS.DasguptaNo ratings yet
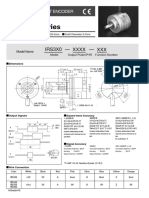
- Series: IRS3X0 XXXX XXXDocument3 pagesSeries: IRS3X0 XXXX XXXjackyNo ratings yet
- ProkonDocument12 pagesProkonHoài Thương LêNo ratings yet
- 1 - Inputs: Project Name: Title of Report: 180xx R0yy Input Variable Name Units Symbol Value Formula & InformationDocument17 pages1 - Inputs: Project Name: Title of Report: 180xx R0yy Input Variable Name Units Symbol Value Formula & InformationSurya PratapNo ratings yet
- AX EX: Figure D5 Forces Acting On Shaft 2 in Z-X (Horizontal) PlaneDocument1 pageAX EX: Figure D5 Forces Acting On Shaft 2 in Z-X (Horizontal) PlaneAbitNo ratings yet
- M 452 ContentDocument84 pagesM 452 ContentSureshNo ratings yet
- 01AM - Sample CalcsDocument2 pages01AM - Sample CalcsPrakash SinghNo ratings yet
- Calculation AC-01 Eagle NiceDocument3 pagesCalculation AC-01 Eagle NiceJoulee NurimanNo ratings yet
- Gearing AgmaDocument17 pagesGearing AgmaDomingos AzevedoNo ratings yet
- Calculating RPM Settings: Step 1Document2 pagesCalculating RPM Settings: Step 1Shashank SaxenaNo ratings yet
- Round HSS Design LRFDDocument4 pagesRound HSS Design LRFDklynchelleNo ratings yet
- Capture D'écran . 2024-03-09 À 11.31.58Document20 pagesCapture D'écran . 2024-03-09 À 11.31.58Abdou HaratNo ratings yet
- Fanuc 30i Data Input OutputDocument10 pagesFanuc 30i Data Input OutputShahzad AnwarNo ratings yet
- Proračun 4.brzinaDocument11 pagesProračun 4.brzinaJurmanNo ratings yet
- 15A03602 Design of Machine Members - IIDocument2 pages15A03602 Design of Machine Members - IIJagannath CherkuNo ratings yet
- Isc Contoh PerhitunganDocument2 pagesIsc Contoh PerhitunganSam PoetraNo ratings yet
- Punching Shear CalculationDocument5 pagesPunching Shear CalculationTrúc NguyễnNo ratings yet
- Index: Section: M Grid CouplingDocument28 pagesIndex: Section: M Grid CouplingViraj PalNo ratings yet
- ATR4518r13 1805Document2 pagesATR4518r13 1805marcosNo ratings yet
- 5Document2 pages5zaki rizaNo ratings yet
- C1 W12x65 Full CalculationDocument5 pagesC1 W12x65 Full CalculationShadin Asari ArabaniNo ratings yet
- Design of Base PlateDocument14 pagesDesign of Base PlateSunidhi ItagiNo ratings yet
- Web Members PDFDocument2 pagesWeb Members PDFJohn Edrick TanNo ratings yet
- MIDAS/Civil: 1. Design InformationDocument1 pageMIDAS/Civil: 1. Design Informationtopan full2No ratings yet
- Design calculation-G.M.maitraDocument15 pagesDesign calculation-G.M.maitraAnuj ShahNo ratings yet
- Tension Rod Design PDFDocument1 pageTension Rod Design PDFMarkNo ratings yet
- Strenght Analysis of Partially Engaged NutDocument3 pagesStrenght Analysis of Partially Engaged NutRavi Teja PolisettiNo ratings yet
- Diagonal Web Member PDFDocument1 pageDiagonal Web Member PDFJohn Edrick TanNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- EEE241L - Lab 6 - RLC ResonanceDocument4 pagesEEE241L - Lab 6 - RLC ResonanceMd. Imdadul Haque Nayan 2222846643No ratings yet
- Online Workshop On Mathematical Sciences For Csir-Net/Set/GateDocument95 pagesOnline Workshop On Mathematical Sciences For Csir-Net/Set/GateJayshri HuddarNo ratings yet
- 18mat411 MAT-1Document4 pages18mat411 MAT-1M.A rajaNo ratings yet
- Model Validation and Analysis of Antenna Look Angles of Geostationary SatelliteDocument6 pagesModel Validation and Analysis of Antenna Look Angles of Geostationary SatellitegantayatNo ratings yet
- 01 Introduction To Properties of Waves Text MergedDocument8 pages01 Introduction To Properties of Waves Text MergedkachechiekurosakiNo ratings yet
- 12th Maths EM Unit Test 1 Model Question Paper English Medium PDF DownloadDocument2 pages12th Maths EM Unit Test 1 Model Question Paper English Medium PDF DownloadLogkalithiyaa V.GNo ratings yet
- Centrifugal SeparationDocument11 pagesCentrifugal SeparationAbdulla S. MahdiNo ratings yet
- Conventional and Slip Steering For Multi-Wheel Planetary RoversDocument39 pagesConventional and Slip Steering For Multi-Wheel Planetary RoversGreggs ShopukNo ratings yet
- LC FY2019 - PETRONAS R8 (00000002a)Document44 pagesLC FY2019 - PETRONAS R8 (00000002a)hasif sheikhNo ratings yet
- Half Yearly - Syllabus Class - XiiDocument2 pagesHalf Yearly - Syllabus Class - XiiSky SirNo ratings yet
- 2159 ExplanationDocument42 pages2159 ExplanationCarlos A GonzaNo ratings yet
- O Level Physics ElectricityDocument38 pagesO Level Physics ElectricityMohsin MughalNo ratings yet
- Supplementary Documentation of GF SSP Version 605Document71 pagesSupplementary Documentation of GF SSP Version 605Michael J. BaneNo ratings yet
- Statics IntroductionDocument19 pagesStatics IntroductionNicoljen MangubatNo ratings yet
- GE 114 Module 2Document12 pagesGE 114 Module 2Marjorie GabrielesNo ratings yet
- Finals Exam 1Document3 pagesFinals Exam 1Alyssa Mei MarceloNo ratings yet
- Yield Lines 2Document24 pagesYield Lines 2alpegambarliNo ratings yet
- Kelompok II Carbon 07 00041 v2Document12 pagesKelompok II Carbon 07 00041 v2OSAMANo ratings yet
- 1802 160101 Study Guide PDFDocument257 pages1802 160101 Study Guide PDFRonan CarrollNo ratings yet
- Seaoc SSDM Vol-1Document243 pagesSeaoc SSDM Vol-1Hytham Elwardany50% (2)
- HDPE Pipe Thickness CalculationsDocument5 pagesHDPE Pipe Thickness CalculationsSantanu Karar100% (2)
- VMA Mastermatrix-110-Tds PDFDocument2 pagesVMA Mastermatrix-110-Tds PDFpavan6595No ratings yet
- Skid Design and AnalysisDocument3 pagesSkid Design and AnalysisdgkmurtiNo ratings yet
- Human Posture Recognition System: Kallam Haranadha Reddy Institute of TechnologyDocument17 pagesHuman Posture Recognition System: Kallam Haranadha Reddy Institute of TechnologyPriya ChowdhuryNo ratings yet
- Ldpe 2420H PDFDocument1 pageLdpe 2420H PDFjavadmohammadiNo ratings yet
- Cambridge International Advanced Subsidiary and Advanced LevelDocument12 pagesCambridge International Advanced Subsidiary and Advanced LevelredwanNo ratings yet
- A.P.Pyatakov - Multiferroic and MagnetoelectricDocument82 pagesA.P.Pyatakov - Multiferroic and MagnetoelectricFreudensteinitzNo ratings yet
- Sikadur 752: Low Viscosity Epoxy Resin InjectionDocument2 pagesSikadur 752: Low Viscosity Epoxy Resin InjectionMike AlarNo ratings yet
- 4-Ductor: Insulated Conductor BarDocument13 pages4-Ductor: Insulated Conductor BarMitica TartareanuNo ratings yet






















































































Download as pdf or txt
You might also like
- Flexible Pavement Design Calculation Spreadsheet According To AASHTODocument45 pagesFlexible Pavement Design Calculation Spreadsheet According To AASHTOMohammed AL-sharafi100% (2)
- Magnification QuestionsDocument4 pagesMagnification QuestionsSaima Syeda0% (1)
- Chine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyDocument1 pageChine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyIonut RabanNo ratings yet
- Chine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyDocument1 pageChine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyIonut RabanNo ratings yet
- Chine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyDocument1 pageChine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyIonut RabanNo ratings yet
- Chine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyDocument1 pageChine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyIonut RabanNo ratings yet
- Chine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyDocument1 pageChine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyIonut RabanNo ratings yet
- Project SampleDocument8 pagesProject SampleRamji RaoNo ratings yet
- Factored Reaction (W) Factored Tensile Force On The Plate W/2Document8 pagesFactored Reaction (W) Factored Tensile Force On The Plate W/2Sudhanshu Shekhar SinglaNo ratings yet
- F&S - Harvery 270deg LollipopDocument2 pagesF&S - Harvery 270deg LollipopRobotNo ratings yet
- Design Calculation of Pulley Belt DriveDocument8 pagesDesign Calculation of Pulley Belt Driveأحمد دعبس83% (6)
- Design Calculation of Gearbox: ST ND RD TH THDocument50 pagesDesign Calculation of Gearbox: ST ND RD TH THKaung KhantNo ratings yet
- Design of Base PlateDocument8 pagesDesign of Base Platemsiddiq1No ratings yet
- Factored Reaction (W) Factored Tensile Force On The Plate W/2Document9 pagesFactored Reaction (W) Factored Tensile Force On The Plate W/2Sudhanshu Shekhar SinglaNo ratings yet
- F&S - Harvery 300deg LollipopDocument2 pagesF&S - Harvery 300deg LollipopRobotNo ratings yet
- SolutionDocument35 pagesSolutionMariel MirafloresNo ratings yet
- Ball - Lead Screw Sizing Tool PDFDocument3 pagesBall - Lead Screw Sizing Tool PDFsero ghazarianNo ratings yet
- Ball - Lead Screw Sizing Tool PDFDocument3 pagesBall - Lead Screw Sizing Tool PDFsero ghazarianNo ratings yet
- Planetry GearsDocument10 pagesPlanetry Gearsvinu1175No ratings yet
- Chine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyDocument1 pageChine Systems Inc Rob Zahensky FR Yer Ma Chine Systems Inc Rob ZahenskyIonut RabanNo ratings yet
- Group 1 Gearbox Design ReportDocument15 pagesGroup 1 Gearbox Design Reportapi-598255067No ratings yet
- P5647-Structural Calculation-40m Monopole VCDocument54 pagesP5647-Structural Calculation-40m Monopole VCJesryl Arellano ArzadonNo ratings yet
- Engine History ReportDocument3 pagesEngine History Reportmarcolinna21No ratings yet
- Calculation AC-1 SunjinDocument3 pagesCalculation AC-1 SunjinJoulee NurimanNo ratings yet
- M 452 ContentDocument63 pagesM 452 ContentprasannaNo ratings yet
- Shafting CalculationsDocument4 pagesShafting Calculationsmohammad shihabNo ratings yet
- Lesson AGMA Standard - Example 1 & 2Document23 pagesLesson AGMA Standard - Example 1 & 2Sphumelele SibuthaNo ratings yet
- Design Calculation HandlingDocument51 pagesDesign Calculation HandlingArshad KhanNo ratings yet
- SolutionDocument4 pagesSolutionhaile mehari100% (1)
- Die CalculationsDocument13 pagesDie CalculationsDhinakaran R100% (1)
- Huawei Atr4518r13Document2 pagesHuawei Atr4518r13Carlos CostaNo ratings yet
- Important Hint: at Least One Warning Has Occurred During The CalculationDocument9 pagesImportant Hint: at Least One Warning Has Occurred During The CalculationS.DasguptaNo ratings yet
- Series: IRS3X0 XXXX XXXDocument3 pagesSeries: IRS3X0 XXXX XXXjackyNo ratings yet
- ProkonDocument12 pagesProkonHoài Thương LêNo ratings yet
- 1 - Inputs: Project Name: Title of Report: 180xx R0yy Input Variable Name Units Symbol Value Formula & InformationDocument17 pages1 - Inputs: Project Name: Title of Report: 180xx R0yy Input Variable Name Units Symbol Value Formula & InformationSurya PratapNo ratings yet
- AX EX: Figure D5 Forces Acting On Shaft 2 in Z-X (Horizontal) PlaneDocument1 pageAX EX: Figure D5 Forces Acting On Shaft 2 in Z-X (Horizontal) PlaneAbitNo ratings yet
- M 452 ContentDocument84 pagesM 452 ContentSureshNo ratings yet
- 01AM - Sample CalcsDocument2 pages01AM - Sample CalcsPrakash SinghNo ratings yet
- Calculation AC-01 Eagle NiceDocument3 pagesCalculation AC-01 Eagle NiceJoulee NurimanNo ratings yet
- Gearing AgmaDocument17 pagesGearing AgmaDomingos AzevedoNo ratings yet
- Calculating RPM Settings: Step 1Document2 pagesCalculating RPM Settings: Step 1Shashank SaxenaNo ratings yet
- Round HSS Design LRFDDocument4 pagesRound HSS Design LRFDklynchelleNo ratings yet
- Capture D'écran . 2024-03-09 À 11.31.58Document20 pagesCapture D'écran . 2024-03-09 À 11.31.58Abdou HaratNo ratings yet
- Fanuc 30i Data Input OutputDocument10 pagesFanuc 30i Data Input OutputShahzad AnwarNo ratings yet
- Proračun 4.brzinaDocument11 pagesProračun 4.brzinaJurmanNo ratings yet
- 15A03602 Design of Machine Members - IIDocument2 pages15A03602 Design of Machine Members - IIJagannath CherkuNo ratings yet
- Isc Contoh PerhitunganDocument2 pagesIsc Contoh PerhitunganSam PoetraNo ratings yet
- Punching Shear CalculationDocument5 pagesPunching Shear CalculationTrúc NguyễnNo ratings yet
- Index: Section: M Grid CouplingDocument28 pagesIndex: Section: M Grid CouplingViraj PalNo ratings yet
- ATR4518r13 1805Document2 pagesATR4518r13 1805marcosNo ratings yet
- 5Document2 pages5zaki rizaNo ratings yet
- C1 W12x65 Full CalculationDocument5 pagesC1 W12x65 Full CalculationShadin Asari ArabaniNo ratings yet
- Design of Base PlateDocument14 pagesDesign of Base PlateSunidhi ItagiNo ratings yet
- Web Members PDFDocument2 pagesWeb Members PDFJohn Edrick TanNo ratings yet
- MIDAS/Civil: 1. Design InformationDocument1 pageMIDAS/Civil: 1. Design Informationtopan full2No ratings yet
- Design calculation-G.M.maitraDocument15 pagesDesign calculation-G.M.maitraAnuj ShahNo ratings yet
- Tension Rod Design PDFDocument1 pageTension Rod Design PDFMarkNo ratings yet
- Strenght Analysis of Partially Engaged NutDocument3 pagesStrenght Analysis of Partially Engaged NutRavi Teja PolisettiNo ratings yet
- Diagonal Web Member PDFDocument1 pageDiagonal Web Member PDFJohn Edrick TanNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- EEE241L - Lab 6 - RLC ResonanceDocument4 pagesEEE241L - Lab 6 - RLC ResonanceMd. Imdadul Haque Nayan 2222846643No ratings yet
- Online Workshop On Mathematical Sciences For Csir-Net/Set/GateDocument95 pagesOnline Workshop On Mathematical Sciences For Csir-Net/Set/GateJayshri HuddarNo ratings yet
- 18mat411 MAT-1Document4 pages18mat411 MAT-1M.A rajaNo ratings yet
- Model Validation and Analysis of Antenna Look Angles of Geostationary SatelliteDocument6 pagesModel Validation and Analysis of Antenna Look Angles of Geostationary SatellitegantayatNo ratings yet
- 01 Introduction To Properties of Waves Text MergedDocument8 pages01 Introduction To Properties of Waves Text MergedkachechiekurosakiNo ratings yet
- 12th Maths EM Unit Test 1 Model Question Paper English Medium PDF DownloadDocument2 pages12th Maths EM Unit Test 1 Model Question Paper English Medium PDF DownloadLogkalithiyaa V.GNo ratings yet
- Centrifugal SeparationDocument11 pagesCentrifugal SeparationAbdulla S. MahdiNo ratings yet
- Conventional and Slip Steering For Multi-Wheel Planetary RoversDocument39 pagesConventional and Slip Steering For Multi-Wheel Planetary RoversGreggs ShopukNo ratings yet
- LC FY2019 - PETRONAS R8 (00000002a)Document44 pagesLC FY2019 - PETRONAS R8 (00000002a)hasif sheikhNo ratings yet
- Half Yearly - Syllabus Class - XiiDocument2 pagesHalf Yearly - Syllabus Class - XiiSky SirNo ratings yet
- 2159 ExplanationDocument42 pages2159 ExplanationCarlos A GonzaNo ratings yet
- O Level Physics ElectricityDocument38 pagesO Level Physics ElectricityMohsin MughalNo ratings yet
- Supplementary Documentation of GF SSP Version 605Document71 pagesSupplementary Documentation of GF SSP Version 605Michael J. BaneNo ratings yet
- Statics IntroductionDocument19 pagesStatics IntroductionNicoljen MangubatNo ratings yet
- GE 114 Module 2Document12 pagesGE 114 Module 2Marjorie GabrielesNo ratings yet
- Finals Exam 1Document3 pagesFinals Exam 1Alyssa Mei MarceloNo ratings yet
- Yield Lines 2Document24 pagesYield Lines 2alpegambarliNo ratings yet
- Kelompok II Carbon 07 00041 v2Document12 pagesKelompok II Carbon 07 00041 v2OSAMANo ratings yet
- 1802 160101 Study Guide PDFDocument257 pages1802 160101 Study Guide PDFRonan CarrollNo ratings yet
- Seaoc SSDM Vol-1Document243 pagesSeaoc SSDM Vol-1Hytham Elwardany50% (2)
- HDPE Pipe Thickness CalculationsDocument5 pagesHDPE Pipe Thickness CalculationsSantanu Karar100% (2)
- VMA Mastermatrix-110-Tds PDFDocument2 pagesVMA Mastermatrix-110-Tds PDFpavan6595No ratings yet
- Skid Design and AnalysisDocument3 pagesSkid Design and AnalysisdgkmurtiNo ratings yet
- Human Posture Recognition System: Kallam Haranadha Reddy Institute of TechnologyDocument17 pagesHuman Posture Recognition System: Kallam Haranadha Reddy Institute of TechnologyPriya ChowdhuryNo ratings yet
- Ldpe 2420H PDFDocument1 pageLdpe 2420H PDFjavadmohammadiNo ratings yet
- Cambridge International Advanced Subsidiary and Advanced LevelDocument12 pagesCambridge International Advanced Subsidiary and Advanced LevelredwanNo ratings yet
- A.P.Pyatakov - Multiferroic and MagnetoelectricDocument82 pagesA.P.Pyatakov - Multiferroic and MagnetoelectricFreudensteinitzNo ratings yet
- Sikadur 752: Low Viscosity Epoxy Resin InjectionDocument2 pagesSikadur 752: Low Viscosity Epoxy Resin InjectionMike AlarNo ratings yet
- 4-Ductor: Insulated Conductor BarDocument13 pages4-Ductor: Insulated Conductor BarMitica TartareanuNo ratings yet