Download as doc, pdf, or txt
You might also like
- 3 Basic Motor Theory 140909Document29 pages3 Basic Motor Theory 140909Manoj NairNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Spaulding Lighting Newark Spec Sheet 8-84Document4 pagesSpaulding Lighting Newark Spec Sheet 8-84Alan MastersNo ratings yet
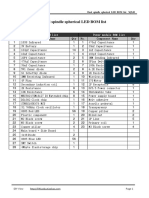
- Dual Spindle Spherical LED BOM List V1.0Document1 pageDual Spindle Spherical LED BOM List V1.0bakadesu senpaitachiNo ratings yet
- Induction motor-UNIT-IVDocument23 pagesInduction motor-UNIT-IVVaibhav SanNo ratings yet
- 3 Phase ImDocument43 pages3 Phase Imvibhash kumar dwivediNo ratings yet
- Module 3. Design of 3 Phase Induction MotorDocument43 pagesModule 3. Design of 3 Phase Induction MotorVivek Pawar83% (6)
- Motor Design PDFDocument43 pagesMotor Design PDFsailolla30No ratings yet
- Inductionmotor DesignDocument31 pagesInductionmotor Designbilalbaig97No ratings yet
- Constructional Details:: 1. Explain The Construction Details of Synchronous MotorDocument28 pagesConstructional Details:: 1. Explain The Construction Details of Synchronous MotorrioNo ratings yet
- Electric Machine Design (Module-4)Document24 pagesElectric Machine Design (Module-4)karumNo ratings yet
- CHAPTER 3 Induction Machine PDFDocument32 pagesCHAPTER 3 Induction Machine PDFhailay haderaNo ratings yet
- Induction Motor Design PDFDocument46 pagesInduction Motor Design PDFdiptiNo ratings yet
- Induction Motor Notes LVBDocument14 pagesInduction Motor Notes LVBlvb123No ratings yet
- Experiment No. 2.4 - The Squirrel-Cage Induction Motor ObjectiveDocument3 pagesExperiment No. 2.4 - The Squirrel-Cage Induction Motor ObjectiveKristine AldayNo ratings yet
- Lecture 10 & 11 Three Phase Induction MotorDocument28 pagesLecture 10 & 11 Three Phase Induction MotorMohamed HosamNo ratings yet
- Poly-Phase Induction MotorDocument27 pagesPoly-Phase Induction Motorjaveria zafeerNo ratings yet
- Parameter Estimation of Three Phase Induction Motor An Innovative Approach ThesisDocument58 pagesParameter Estimation of Three Phase Induction Motor An Innovative Approach ThesisIrfan Ashraf0% (1)
- A.C. MachineDocument32 pagesA.C. MachinehayikNo ratings yet
- Unit - 2 Optimal Design of DC Machine Unit-02/Lecture-01Document31 pagesUnit - 2 Optimal Design of DC Machine Unit-02/Lecture-01madeehaNo ratings yet
- Development of High Speed Alternator For Small Gas Turbine EngineDocument8 pagesDevelopment of High Speed Alternator For Small Gas Turbine EngineMahesh NakawalaNo ratings yet
- Unit VDocument32 pagesUnit Vrahulmeenameenarahul26No ratings yet
- Induction MotorsDocument47 pagesInduction MotorsPurushothaman KannanNo ratings yet
- Brake Load Test of Squirel Cage Induction Motor 3 PhaseDocument7 pagesBrake Load Test of Squirel Cage Induction Motor 3 Phasejassisc100% (1)
- Induction Motor (Asynchronous Motor) : Electrical MachinesDocument41 pagesInduction Motor (Asynchronous Motor) : Electrical MachinesNAITIKNo ratings yet
- Design of Induction Motors PDFDocument108 pagesDesign of Induction Motors PDFMaverick Naidu100% (3)
- (Four Weeks) : (Ambala Cantt) Krishan Kumar (11101032)Document33 pages(Four Weeks) : (Ambala Cantt) Krishan Kumar (11101032)crys suryo prayogo100% (1)
- Unit - IvDocument24 pagesUnit - Ivdurairajgeetha318No ratings yet
- Ee8002 - Dem - Question Bank - Unit4Document4 pagesEe8002 - Dem - Question Bank - Unit4DEVINo ratings yet
- 3 Phase Induction MotorDocument48 pages3 Phase Induction Motormsd183wkNo ratings yet
- Analysis of Brushless Three-Phase Synchronous Generator Without ExciterDocument10 pagesAnalysis of Brushless Three-Phase Synchronous Generator Without ExciterJuan Andres Rojas SerranoNo ratings yet
- Generator Design StepsDocument40 pagesGenerator Design Stepsrajfab100% (1)
- E2063 Teknologi Elektrik 2 UNIT7Document36 pagesE2063 Teknologi Elektrik 2 UNIT7dbu2952No ratings yet
- Three Phase Induction Motor: ProjectDocument6 pagesThree Phase Induction Motor: ProjectEhsanul Haque NirjharNo ratings yet
- Electrical Technology (15A02306) : Lecture Notes B.TechDocument60 pagesElectrical Technology (15A02306) : Lecture Notes B.Techabdul kareemNo ratings yet
- Induction MachinesDocument11 pagesInduction MachinesTayyab HussainNo ratings yet
- Manufacturing of Turbo GeneratorDocument27 pagesManufacturing of Turbo GeneratorNava Deep100% (2)
- UNIT 7 AlternatorsDocument8 pagesUNIT 7 AlternatorsPadmavathi ShenoyNo ratings yet
- Induction MotorDocument20 pagesInduction MotorC V VIJAY KUMASRNo ratings yet
- 001 Bien KowskiDocument5 pages001 Bien KowskikarnatisharathNo ratings yet
- EMD-M5 - StudentDocument35 pagesEMD-M5 - StudentAshwiniNo ratings yet
- Motor CaculationDocument28 pagesMotor CaculationThiet PhamNo ratings yet
- EE-101 (Unit-5)Document81 pagesEE-101 (Unit-5)Chauhan AyushmaanNo ratings yet
- ACM Doc1Document72 pagesACM Doc1ShubhNo ratings yet
- Ijest12 04 01 032 PDFDocument6 pagesIjest12 04 01 032 PDFNius Pahala NainggolanNo ratings yet
- Penjana AuDocument9 pagesPenjana AuNo Ones100% (1)
- Chapter3 InductionmachineDocument25 pagesChapter3 InductionmachineAbhijitNo ratings yet
- Unit-3 EeeDocument9 pagesUnit-3 EeeShubham KhandelwalNo ratings yet
- Optimum Motor Protection en - LIBRODocument80 pagesOptimum Motor Protection en - LIBROEdgardo Kat ReyesNo ratings yet
- Darshan Institute of Engineering & Technology, Rajkot (Gujarat)Document34 pagesDarshan Institute of Engineering & Technology, Rajkot (Gujarat)muqthiarNo ratings yet
- Module 4Document25 pagesModule 4Rohit AnejaNo ratings yet
- MoappDocument5 pagesMoappluanleNo ratings yet
- Wound Rotor Induction MotorDocument4 pagesWound Rotor Induction MotorAnonymous zeISoBNo ratings yet
- VVVF DrivesDocument16 pagesVVVF DrivesIsradani MjNo ratings yet
- Construction of 3phase AC Induction MotorsDocument3 pagesConstruction of 3phase AC Induction Motorsat35No ratings yet
- AC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of HelwanDocument25 pagesAC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of Helwanadelelsamahy5958No ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsFrom EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNo ratings yet
- Eatingwell.com Article 7946161 Diabetes-foot-health-tips PrintDocument2 pagesEatingwell.com Article 7946161 Diabetes-foot-health-tips PrintVaibhav SanNo ratings yet
- Windformer: Wind Power Goes Large-ScaleDocument7 pagesWindformer: Wind Power Goes Large-ScaleVaibhav SanNo ratings yet
- Eco Energy SolutionDocument11 pagesEco Energy SolutionVaibhav SanNo ratings yet
- MGL Bill Pay Aug2023Document19 pagesMGL Bill Pay Aug2023Vaibhav SanNo ratings yet
- 5 HP Induction MotorsDocument10 pages5 HP Induction MotorsVaibhav SanNo ratings yet
- Design Study of A Direct-Driven Surface Mounted PeDocument7 pagesDesign Study of A Direct-Driven Surface Mounted PeVaibhav SanNo ratings yet
- 1design of A Small Wind Turbine For ElectDocument34 pages1design of A Small Wind Turbine For ElectVaibhav SanNo ratings yet
- Investigation On Pole-Slot Combinations For PermanDocument7 pagesInvestigation On Pole-Slot Combinations For PermanVaibhav SanNo ratings yet
- Agronic Broucher DesignDocument4 pagesAgronic Broucher DesignVaibhav SanNo ratings yet
- Charges Deducted Iin Intraday TradingDocument1 pageCharges Deducted Iin Intraday TradingVaibhav SanNo ratings yet
- Membrane Switch Design Guide: ISO 9001: 2008 CertifiedDocument8 pagesMembrane Switch Design Guide: ISO 9001: 2008 CertifiedVaibhav SanNo ratings yet
- Rico Italy E BookletDocument28 pagesRico Italy E BookletVaibhav SanNo ratings yet
- Slayer Exciter CircuitDocument2 pagesSlayer Exciter CircuitRalph VaronNo ratings yet
- Activity Activity Activity Activity Activity: ActivitiesDocument2 pagesActivity Activity Activity Activity Activity: ActivitiesHarsh ShahNo ratings yet
- Manual US DeyeDocument56 pagesManual US DeyeRoman Mikhail Pak Balitskiy100% (1)
- Basic ElectronicsDocument73 pagesBasic ElectronicsBluff FlersNo ratings yet
- Physics Inves Project 12thDocument10 pagesPhysics Inves Project 12thBharathi PonnuduraiNo ratings yet
- 135-h MG-07 PDFDocument9 pages135-h MG-07 PDFrafasel otubo guatiaNo ratings yet
- ITT American Electric HPS Micro-Watt Flood Series M Spec Sheet 1-82Document6 pagesITT American Electric HPS Micro-Watt Flood Series M Spec Sheet 1-82Alan MastersNo ratings yet
- Vacuum Contactor (Hca)Document24 pagesVacuum Contactor (Hca)richardstall2012No ratings yet
- PD350-20085 EngbDocument3 pagesPD350-20085 Engbjonas.debotNo ratings yet
- 3RT10556NB36 Datasheet enDocument12 pages3RT10556NB36 Datasheet enSusantoNo ratings yet
- Chapter 2 Kim FDocument29 pagesChapter 2 Kim FMuhammad Sohaib ShahidNo ratings yet
- XT4056 eDocument8 pagesXT4056 eAirton SousaNo ratings yet
- Ee8401 - em Ii - Question Bank - Unit1Document4 pagesEe8401 - em Ii - Question Bank - Unit1DEVINo ratings yet
- LM2695 High Voltage (30V, 1.25A) Step Down Switching RegulatorDocument14 pagesLM2695 High Voltage (30V, 1.25A) Step Down Switching RegulatorYoyok CahyonoNo ratings yet
- Matlab Project IdeasDocument3 pagesMatlab Project IdeasptarwatkarNo ratings yet
- Motor Suppression:: ImportantDocument2 pagesMotor Suppression:: ImportantDino NoomNo ratings yet
- High Voltage Direct Current Transmission (HVDC)Document18 pagesHigh Voltage Direct Current Transmission (HVDC)Aurongo NasirNo ratings yet
- 42BYGHW609 Stepper Motor Datasheet1Document3 pages42BYGHW609 Stepper Motor Datasheet1Alan_88No ratings yet
- InductionDocument5 pagesInductionadarshNo ratings yet
- AX84 P1x Options 101004Document2 pagesAX84 P1x Options 101004pnm Nikisam0j0No ratings yet
- Wiring Diagram Manual Split System Air Conditioner: (C/H/T) SA6Document4 pagesWiring Diagram Manual Split System Air Conditioner: (C/H/T) SA6Muhammad ShazwanNo ratings yet
- Study of Electric Circuit Lab Equipment: Experiment # 1Document2 pagesStudy of Electric Circuit Lab Equipment: Experiment # 1axe fury100% (1)
- J1939 Datalink Layout Overview: AllisonDocument1 pageJ1939 Datalink Layout Overview: Allisonamin chaabenNo ratings yet
- AC Generator TheroryDocument11 pagesAC Generator TheroryM Kumar MarimuthuNo ratings yet
- Building A Data CenterDocument3 pagesBuilding A Data CenterGuillermo Lopez-FloresNo ratings yet
- ECE 381L No1aDocument6 pagesECE 381L No1aNakunaru GretserNo ratings yet
- Inductor Color Code GuideDocument2 pagesInductor Color Code GuideBarry Bj Shaide100% (1)
- Air Conditioning (Manual Control) : Wiring DiagramDocument5 pagesAir Conditioning (Manual Control) : Wiring DiagramArmando RiveraNo ratings yet