
Journal Pre-Proof: Medical Image Analysis
Journal Pre-Proof: Medical Image Analysis
You might also like
- ProductFlyer 9780857290816Document1 pageProductFlyer 9780857290816alan19660% (1)
- NeurIPS 2020 Retrieval Augmented Generation For Knowledge Intensive NLP Tasks PaperDocument16 pagesNeurIPS 2020 Retrieval Augmented Generation For Knowledge Intensive NLP Tasks PaperGiovanni GuimarãesNo ratings yet
- The Allen Mouse Brain Common Coordinate Framework - A 3D Reference AtlasDocument39 pagesThe Allen Mouse Brain Common Coordinate Framework - A 3D Reference AtlasAlen BenNo ratings yet
- 1 s2.0 S0959438817300429 MainDocument6 pages1 s2.0 S0959438817300429 Maindebanik1991No ratings yet
- How Powerful Are Graph Neural NetworksDocument17 pagesHow Powerful Are Graph Neural NetworksMayssa SOUSSIANo ratings yet
- Saudi Journal of Biological Sciences: Wei Gao, Hualong Wu, Muhammad Kamran Siddiqui, Abdul Qudair BaigDocument8 pagesSaudi Journal of Biological Sciences: Wei Gao, Hualong Wu, Muhammad Kamran Siddiqui, Abdul Qudair BaigJackeline LemeNo ratings yet
- Heterogeneous Graph Attention NetworkDocument21 pagesHeterogeneous Graph Attention NetworkVikas KumarNo ratings yet
- Towards Interpretable Object Detection by Unfolding Latent StructuresDocument11 pagesTowards Interpretable Object Detection by Unfolding Latent StructuresChinnu S SathishNo ratings yet
- On The Performance of Covariance Based Spectrum Sensing For Cognitive RadioDocument13 pagesOn The Performance of Covariance Based Spectrum Sensing For Cognitive RadioProf. Narendra ChauhanNo ratings yet
- Cat2vec Learning Distributed Representation of Multi Field Categorical DataDocument9 pagesCat2vec Learning Distributed Representation of Multi Field Categorical DataManikanta SreekakulaNo ratings yet
- Neuroimage: Siobhan Ewert, Andreas Horn, Francisca Finkel, Ningfei Li, Andrea A. Kühn, Todd M. HerringtonDocument13 pagesNeuroimage: Siobhan Ewert, Andreas Horn, Francisca Finkel, Ningfei Li, Andrea A. Kühn, Todd M. HerringtonBeth LloydNo ratings yet
- 1 s2.0 S0167865521003147 MainDocument7 pages1 s2.0 S0167865521003147 Mainmirandasuryaprakash_No ratings yet
- Everything Is Connected: Graph Neural Networks: Petar Veli Ckovi CDocument14 pagesEverything Is Connected: Graph Neural Networks: Petar Veli Ckovi CJoséVíctorRiveroNo ratings yet
- 25072-Article Text-29135-1-2-20230626Document9 pages25072-Article Text-29135-1-2-20230626Tejas PagareNo ratings yet
- UNETR: Transformers For 3D Medical Image SegmentationDocument11 pagesUNETR: Transformers For 3D Medical Image SegmentationBashar ShamiNo ratings yet
- Deep AEDocument53 pagesDeep AEashikurrahman29012000No ratings yet
- Fast and Accurate Neural CRF Constituency ParsingDocument8 pagesFast and Accurate Neural CRF Constituency Parsing23520053 I Putu Eka Surya AdityaNo ratings yet
- Deep GP Untuk SpeechDocument8 pagesDeep GP Untuk SpeechSapto IndratnoNo ratings yet
- Convolutional Neural Network With Data Augmentation For SAR Target RecognitionDocument5 pagesConvolutional Neural Network With Data Augmentation For SAR Target RecognitionS M RizviNo ratings yet
- Neural NetworksDocument6 pagesNeural NetworksBudrescu GeorgeNo ratings yet
- Simultaneous Detection and SegmentationDocument16 pagesSimultaneous Detection and SegmentationRazzNo ratings yet
- GRUUNetDocument12 pagesGRUUNetAshish SinghNo ratings yet
- Chap7 GNN (20240229) - DL4H Practioner GuideDocument37 pagesChap7 GNN (20240229) - DL4H Practioner GuidethesupprterNo ratings yet
- Python Fmri AnalysisDocument5 pagesPython Fmri AnalysisKübra AkyüzNo ratings yet
- Accepted Manuscript: Journal of Neuroscience MethodsDocument13 pagesAccepted Manuscript: Journal of Neuroscience MethodsChrisilla SNo ratings yet
- Thesis Report On Image DenoisingDocument8 pagesThesis Report On Image Denoisingafkofcwjq100% (2)
- Chen 2015Document8 pagesChen 2015Shristi Das BiswasNo ratings yet
- Regression: Machine Learning Course - CS-433Document5 pagesRegression: Machine Learning Course - CS-433UasdafNo ratings yet
- Micro NetDocument14 pagesMicro NetAshish SinghNo ratings yet
- Module - 5 Lecture Notes - 5: Remote Sensing-Digital Image Processing Information Extraction Principal Component AnalysisDocument10 pagesModule - 5 Lecture Notes - 5: Remote Sensing-Digital Image Processing Information Extraction Principal Component Analysisgoel2001No ratings yet
- Forecasting Stock Indices With Back Propagation Neural NetworkDocument10 pagesForecasting Stock Indices With Back Propagation Neural Networksarte00No ratings yet
- SVM Kermel RefpicsDocument11 pagesSVM Kermel Refpicsmscdatascience3No ratings yet
- A Classification Method of The Osteonecrosis of Femoral Head Based On Deep LearningDocument5 pagesA Classification Method of The Osteonecrosis of Femoral Head Based On Deep Learning857988543No ratings yet
- 4823-Article Text-7889-1-10-20190709Document9 pages4823-Article Text-7889-1-10-20190709Binay AdhikariNo ratings yet
- Recurrent Nested Model For Sequence Generation: Wenhao Jiang, Lin Ma, Wei LuDocument8 pagesRecurrent Nested Model For Sequence Generation: Wenhao Jiang, Lin Ma, Wei LuAdmissionofficer kbgNo ratings yet
- 2020 - Supervised Community Detection With Line Graph Neural Networks - Chen Et AlDocument24 pages2020 - Supervised Community Detection With Line Graph Neural Networks - Chen Et AlBlue PoisonNo ratings yet
- Information Sciences: Hao Li, Maoguo Gong, Qiguang Miao, Bin WangDocument20 pagesInformation Sciences: Hao Li, Maoguo Gong, Qiguang Miao, Bin Wangazazel17No ratings yet
- Research On Face Recognition Based On CNNDocument6 pagesResearch On Face Recognition Based On CNNManju SriNo ratings yet
- Liu 22 SDocument19 pagesLiu 22 SSicong CaoNo ratings yet
- Nerf Paper IA 3DDocument8 pagesNerf Paper IA 3DgenialNo ratings yet
- 2008 - Optimizing Spatial Filters For Robust EEG Single-Trial AnalysisDocument16 pages2008 - Optimizing Spatial Filters For Robust EEG Single-Trial AnalysisLucas da SilvaNo ratings yet
- Explaining Neural Networks Semantically and QuantitativelyDocument19 pagesExplaining Neural Networks Semantically and Quantitativelygupnaval2473No ratings yet
- Kopa: Automated Kronecker Product ApproximationDocument42 pagesKopa: Automated Kronecker Product ApproximationSai lalithNo ratings yet
- An Efficient Use of Principal Component Analysis in Workload - 2014 - AASRI ProDocument7 pagesAn Efficient Use of Principal Component Analysis in Workload - 2014 - AASRI ProMohammed Shuaib AhmedNo ratings yet
- 6 - 2007-The Correlation Between The Wavelet Base Properties and Image CompressionDocument4 pages6 - 2007-The Correlation Between The Wavelet Base Properties and Image Compressionnabila brahimiNo ratings yet
- An Efficient Algorithm For Designing Projection Matrix in Compressive Sensing Based On Alternating OptimizationDocument13 pagesAn Efficient Algorithm For Designing Projection Matrix in Compressive Sensing Based On Alternating OptimizationZorba ZorbaNo ratings yet
- Fingerprint Image Enhancement Using Directional Filter Bank: Tariq Mahmood F-09-014Document16 pagesFingerprint Image Enhancement Using Directional Filter Bank: Tariq Mahmood F-09-014tariq Mhmood khNo ratings yet
- Convolutional Neural Networks-Part1Document15 pagesConvolutional Neural Networks-Part1polinati.vinesh2023No ratings yet
- 1 s2.0 S0959440X2300012X MainDocument6 pages1 s2.0 S0959440X2300012X MainErsela ZainNo ratings yet
- Saporta 1990 63Document7 pagesSaporta 1990 63Rachid EL ABDALLAOUINo ratings yet
- yuan21cDocument12 pagesyuan21cThiago Raulino Dal PontNo ratings yet
- Sciencedirect: A Novel Illumination Invariant Face Recognition Method Based On Pca and WPD Using Ycbcr Color SpaceDocument7 pagesSciencedirect: A Novel Illumination Invariant Face Recognition Method Based On Pca and WPD Using Ycbcr Color SpaceAbdelhalim BouallegNo ratings yet
- Neurocomputing: Kyongson Jon, Ying Sun, Qixin Li, Jun Liu, Xiaofei Wang, Wensheng ZhuDocument13 pagesNeurocomputing: Kyongson Jon, Ying Sun, Qixin Li, Jun Liu, Xiaofei Wang, Wensheng ZhusobiaNo ratings yet
- GenomicsDocument14 pagesGenomicsjohnjoeNo ratings yet
- 20222-Article Text-24235-1-2-20220628Document9 pages20222-Article Text-24235-1-2-20220628sdhpNo ratings yet
- A Geometric Understanding of Deep Learning 2020 EngineeringDocument14 pagesA Geometric Understanding of Deep Learning 2020 Engineeringmahsa saeidiNo ratings yet
- 978-3-030-86475-0_9-2Document7 pages978-3-030-86475-0_9-2Aditya sai ram NemaliNo ratings yet
- 2 Interpretability of Hybrid Feature Using Graph Neural Networks From Mental Arithmetic Based EEGDocument5 pages2 Interpretability of Hybrid Feature Using Graph Neural Networks From Mental Arithmetic Based EEG정민경No ratings yet
- Batch6 PPT - 1Document20 pagesBatch6 PPT - 1prakash buisinessNo ratings yet
- Visual Cross-Image Fusion Using Deep Neural Networks For Image Edge DetectionDocument12 pagesVisual Cross-Image Fusion Using Deep Neural Networks For Image Edge DetectionWilluNo ratings yet
- Problems For Chapter 2Document5 pagesProblems For Chapter 2Aldhi PrastyaNo ratings yet
- NonRoutineQn 1 - 1Document4 pagesNonRoutineQn 1 - 1ldz1985No ratings yet
- Assignment 2 Img PDFDocument7 pagesAssignment 2 Img PDFUtkrisht KashyapNo ratings yet
- m6 GameDocument21 pagesm6 GameMohammad Gulam AhamadNo ratings yet
- Arbori Binari de CautareDocument4 pagesArbori Binari de CautareCristianValentinNo ratings yet
- Math 10 Factoring Polynomials PDFDocument5 pagesMath 10 Factoring Polynomials PDF-Lady Kate-No ratings yet
- Machine Learning &deep Learning in Python &RDocument48 pagesMachine Learning &deep Learning in Python &RswatiNo ratings yet
- Model Sistem Antrian Pada Pelayanan Restoran Cepat Saji (Studi Kasus Di KFC Gajah Mada Kabupaten Jember)Document19 pagesModel Sistem Antrian Pada Pelayanan Restoran Cepat Saji (Studi Kasus Di KFC Gajah Mada Kabupaten Jember)Paulus MbabaNo ratings yet
- Revision Test III MathsDocument7 pagesRevision Test III MathsVaibhavMittalNo ratings yet
- Partial Adjustment ModelDocument3 pagesPartial Adjustment Modelnai09No ratings yet
- Problem-Solving: Solving Problems by SearchingDocument40 pagesProblem-Solving: Solving Problems by SearchingIhab Amer100% (1)
- Classical CryptoDocument16 pagesClassical CryptoMusic LandNo ratings yet
- Introduction To EconometricsDocument37 pagesIntroduction To EconometricsKathiravan GopalanNo ratings yet
- Conference PresentationDocument25 pagesConference PresentationAniqa KhurshidNo ratings yet
- Practice Exam 2Document4 pagesPractice Exam 2Mikey ZhouNo ratings yet
- Assignment No1 MLDocument5 pagesAssignment No1 MLakramullah khanNo ratings yet
- Numerical Derivatives Scilab 2Document59 pagesNumerical Derivatives Scilab 2Alejandro MoncadaNo ratings yet
- Control System Design by Frequency Response Using Matlab: Riyadh Nazar Ali AL-Gburi, Ali Saleh AzizDocument7 pagesControl System Design by Frequency Response Using Matlab: Riyadh Nazar Ali AL-Gburi, Ali Saleh AzizAmanNo ratings yet
- PID Control With Fuzzy Compensation For Hydroelectric Generating Unit - For ThanhDocument5 pagesPID Control With Fuzzy Compensation For Hydroelectric Generating Unit - For ThanhLê Trung DũngNo ratings yet
- Artificial Intelligence: Unit 1-IDocument24 pagesArtificial Intelligence: Unit 1-IANKUSH NEGINo ratings yet
- Context-Free Grammars 2. Parsing and Ambiguity 3. Context-Free Grammars and Programming Languages 4. Tutorial QuestionsDocument21 pagesContext-Free Grammars 2. Parsing and Ambiguity 3. Context-Free Grammars and Programming Languages 4. Tutorial QuestionsromeofatimaNo ratings yet
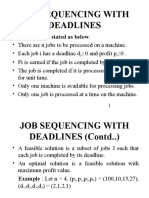
- Job Sequencing With Deadlines: The Problem Is Stated As BelowDocument24 pagesJob Sequencing With Deadlines: The Problem Is Stated As BelowVijay TrivediNo ratings yet
- 204184: Data Structures and Algorithms: SR - No Topic Reference Book UNIT I: Introduction To C and AlgorithmDocument3 pages204184: Data Structures and Algorithms: SR - No Topic Reference Book UNIT I: Introduction To C and Algorithmmadhuri nimseNo ratings yet
- Finite Difference Modeling of Acoustic Waves in Matlab: January 1999Document20 pagesFinite Difference Modeling of Acoustic Waves in Matlab: January 1999Steve HeartNo ratings yet
- Apollo Case QuestionsDocument2 pagesApollo Case QuestionsNitin VermaNo ratings yet
- CH 5Document4 pagesCH 5Maulik ChaudharyNo ratings yet
- CS 1505Document189 pagesCS 1505Akshit SharmaNo ratings yet
- Image Based Password AuthenticationDocument61 pagesImage Based Password AuthenticationA M Shahed HasanNo ratings yet
- Rainflow Analysis of Switching Markov LoadsDocument203 pagesRainflow Analysis of Switching Markov LoadsIvo LozićNo ratings yet

























































































Download as pdf or txt
You might also like
- ProductFlyer 9780857290816Document1 pageProductFlyer 9780857290816alan19660% (1)
- NeurIPS 2020 Retrieval Augmented Generation For Knowledge Intensive NLP Tasks PaperDocument16 pagesNeurIPS 2020 Retrieval Augmented Generation For Knowledge Intensive NLP Tasks PaperGiovanni GuimarãesNo ratings yet
- The Allen Mouse Brain Common Coordinate Framework - A 3D Reference AtlasDocument39 pagesThe Allen Mouse Brain Common Coordinate Framework - A 3D Reference AtlasAlen BenNo ratings yet
- 1 s2.0 S0959438817300429 MainDocument6 pages1 s2.0 S0959438817300429 Maindebanik1991No ratings yet
- How Powerful Are Graph Neural NetworksDocument17 pagesHow Powerful Are Graph Neural NetworksMayssa SOUSSIANo ratings yet
- Saudi Journal of Biological Sciences: Wei Gao, Hualong Wu, Muhammad Kamran Siddiqui, Abdul Qudair BaigDocument8 pagesSaudi Journal of Biological Sciences: Wei Gao, Hualong Wu, Muhammad Kamran Siddiqui, Abdul Qudair BaigJackeline LemeNo ratings yet
- Heterogeneous Graph Attention NetworkDocument21 pagesHeterogeneous Graph Attention NetworkVikas KumarNo ratings yet
- Towards Interpretable Object Detection by Unfolding Latent StructuresDocument11 pagesTowards Interpretable Object Detection by Unfolding Latent StructuresChinnu S SathishNo ratings yet
- On The Performance of Covariance Based Spectrum Sensing For Cognitive RadioDocument13 pagesOn The Performance of Covariance Based Spectrum Sensing For Cognitive RadioProf. Narendra ChauhanNo ratings yet
- Cat2vec Learning Distributed Representation of Multi Field Categorical DataDocument9 pagesCat2vec Learning Distributed Representation of Multi Field Categorical DataManikanta SreekakulaNo ratings yet
- Neuroimage: Siobhan Ewert, Andreas Horn, Francisca Finkel, Ningfei Li, Andrea A. Kühn, Todd M. HerringtonDocument13 pagesNeuroimage: Siobhan Ewert, Andreas Horn, Francisca Finkel, Ningfei Li, Andrea A. Kühn, Todd M. HerringtonBeth LloydNo ratings yet
- 1 s2.0 S0167865521003147 MainDocument7 pages1 s2.0 S0167865521003147 Mainmirandasuryaprakash_No ratings yet
- Everything Is Connected: Graph Neural Networks: Petar Veli Ckovi CDocument14 pagesEverything Is Connected: Graph Neural Networks: Petar Veli Ckovi CJoséVíctorRiveroNo ratings yet
- 25072-Article Text-29135-1-2-20230626Document9 pages25072-Article Text-29135-1-2-20230626Tejas PagareNo ratings yet
- UNETR: Transformers For 3D Medical Image SegmentationDocument11 pagesUNETR: Transformers For 3D Medical Image SegmentationBashar ShamiNo ratings yet
- Deep AEDocument53 pagesDeep AEashikurrahman29012000No ratings yet
- Fast and Accurate Neural CRF Constituency ParsingDocument8 pagesFast and Accurate Neural CRF Constituency Parsing23520053 I Putu Eka Surya AdityaNo ratings yet
- Deep GP Untuk SpeechDocument8 pagesDeep GP Untuk SpeechSapto IndratnoNo ratings yet
- Convolutional Neural Network With Data Augmentation For SAR Target RecognitionDocument5 pagesConvolutional Neural Network With Data Augmentation For SAR Target RecognitionS M RizviNo ratings yet
- Neural NetworksDocument6 pagesNeural NetworksBudrescu GeorgeNo ratings yet
- Simultaneous Detection and SegmentationDocument16 pagesSimultaneous Detection and SegmentationRazzNo ratings yet
- GRUUNetDocument12 pagesGRUUNetAshish SinghNo ratings yet
- Chap7 GNN (20240229) - DL4H Practioner GuideDocument37 pagesChap7 GNN (20240229) - DL4H Practioner GuidethesupprterNo ratings yet
- Python Fmri AnalysisDocument5 pagesPython Fmri AnalysisKübra AkyüzNo ratings yet
- Accepted Manuscript: Journal of Neuroscience MethodsDocument13 pagesAccepted Manuscript: Journal of Neuroscience MethodsChrisilla SNo ratings yet
- Thesis Report On Image DenoisingDocument8 pagesThesis Report On Image Denoisingafkofcwjq100% (2)
- Chen 2015Document8 pagesChen 2015Shristi Das BiswasNo ratings yet
- Regression: Machine Learning Course - CS-433Document5 pagesRegression: Machine Learning Course - CS-433UasdafNo ratings yet
- Micro NetDocument14 pagesMicro NetAshish SinghNo ratings yet
- Module - 5 Lecture Notes - 5: Remote Sensing-Digital Image Processing Information Extraction Principal Component AnalysisDocument10 pagesModule - 5 Lecture Notes - 5: Remote Sensing-Digital Image Processing Information Extraction Principal Component Analysisgoel2001No ratings yet
- Forecasting Stock Indices With Back Propagation Neural NetworkDocument10 pagesForecasting Stock Indices With Back Propagation Neural Networksarte00No ratings yet
- SVM Kermel RefpicsDocument11 pagesSVM Kermel Refpicsmscdatascience3No ratings yet
- A Classification Method of The Osteonecrosis of Femoral Head Based On Deep LearningDocument5 pagesA Classification Method of The Osteonecrosis of Femoral Head Based On Deep Learning857988543No ratings yet
- 4823-Article Text-7889-1-10-20190709Document9 pages4823-Article Text-7889-1-10-20190709Binay AdhikariNo ratings yet
- Recurrent Nested Model For Sequence Generation: Wenhao Jiang, Lin Ma, Wei LuDocument8 pagesRecurrent Nested Model For Sequence Generation: Wenhao Jiang, Lin Ma, Wei LuAdmissionofficer kbgNo ratings yet
- 2020 - Supervised Community Detection With Line Graph Neural Networks - Chen Et AlDocument24 pages2020 - Supervised Community Detection With Line Graph Neural Networks - Chen Et AlBlue PoisonNo ratings yet
- Information Sciences: Hao Li, Maoguo Gong, Qiguang Miao, Bin WangDocument20 pagesInformation Sciences: Hao Li, Maoguo Gong, Qiguang Miao, Bin Wangazazel17No ratings yet
- Research On Face Recognition Based On CNNDocument6 pagesResearch On Face Recognition Based On CNNManju SriNo ratings yet
- Liu 22 SDocument19 pagesLiu 22 SSicong CaoNo ratings yet
- Nerf Paper IA 3DDocument8 pagesNerf Paper IA 3DgenialNo ratings yet
- 2008 - Optimizing Spatial Filters For Robust EEG Single-Trial AnalysisDocument16 pages2008 - Optimizing Spatial Filters For Robust EEG Single-Trial AnalysisLucas da SilvaNo ratings yet
- Explaining Neural Networks Semantically and QuantitativelyDocument19 pagesExplaining Neural Networks Semantically and Quantitativelygupnaval2473No ratings yet
- Kopa: Automated Kronecker Product ApproximationDocument42 pagesKopa: Automated Kronecker Product ApproximationSai lalithNo ratings yet
- An Efficient Use of Principal Component Analysis in Workload - 2014 - AASRI ProDocument7 pagesAn Efficient Use of Principal Component Analysis in Workload - 2014 - AASRI ProMohammed Shuaib AhmedNo ratings yet
- 6 - 2007-The Correlation Between The Wavelet Base Properties and Image CompressionDocument4 pages6 - 2007-The Correlation Between The Wavelet Base Properties and Image Compressionnabila brahimiNo ratings yet
- An Efficient Algorithm For Designing Projection Matrix in Compressive Sensing Based On Alternating OptimizationDocument13 pagesAn Efficient Algorithm For Designing Projection Matrix in Compressive Sensing Based On Alternating OptimizationZorba ZorbaNo ratings yet
- Fingerprint Image Enhancement Using Directional Filter Bank: Tariq Mahmood F-09-014Document16 pagesFingerprint Image Enhancement Using Directional Filter Bank: Tariq Mahmood F-09-014tariq Mhmood khNo ratings yet
- Convolutional Neural Networks-Part1Document15 pagesConvolutional Neural Networks-Part1polinati.vinesh2023No ratings yet
- 1 s2.0 S0959440X2300012X MainDocument6 pages1 s2.0 S0959440X2300012X MainErsela ZainNo ratings yet
- Saporta 1990 63Document7 pagesSaporta 1990 63Rachid EL ABDALLAOUINo ratings yet
- yuan21cDocument12 pagesyuan21cThiago Raulino Dal PontNo ratings yet
- Sciencedirect: A Novel Illumination Invariant Face Recognition Method Based On Pca and WPD Using Ycbcr Color SpaceDocument7 pagesSciencedirect: A Novel Illumination Invariant Face Recognition Method Based On Pca and WPD Using Ycbcr Color SpaceAbdelhalim BouallegNo ratings yet
- Neurocomputing: Kyongson Jon, Ying Sun, Qixin Li, Jun Liu, Xiaofei Wang, Wensheng ZhuDocument13 pagesNeurocomputing: Kyongson Jon, Ying Sun, Qixin Li, Jun Liu, Xiaofei Wang, Wensheng ZhusobiaNo ratings yet
- GenomicsDocument14 pagesGenomicsjohnjoeNo ratings yet
- 20222-Article Text-24235-1-2-20220628Document9 pages20222-Article Text-24235-1-2-20220628sdhpNo ratings yet
- A Geometric Understanding of Deep Learning 2020 EngineeringDocument14 pagesA Geometric Understanding of Deep Learning 2020 Engineeringmahsa saeidiNo ratings yet
- 978-3-030-86475-0_9-2Document7 pages978-3-030-86475-0_9-2Aditya sai ram NemaliNo ratings yet
- 2 Interpretability of Hybrid Feature Using Graph Neural Networks From Mental Arithmetic Based EEGDocument5 pages2 Interpretability of Hybrid Feature Using Graph Neural Networks From Mental Arithmetic Based EEG정민경No ratings yet
- Batch6 PPT - 1Document20 pagesBatch6 PPT - 1prakash buisinessNo ratings yet
- Visual Cross-Image Fusion Using Deep Neural Networks For Image Edge DetectionDocument12 pagesVisual Cross-Image Fusion Using Deep Neural Networks For Image Edge DetectionWilluNo ratings yet
- Problems For Chapter 2Document5 pagesProblems For Chapter 2Aldhi PrastyaNo ratings yet
- NonRoutineQn 1 - 1Document4 pagesNonRoutineQn 1 - 1ldz1985No ratings yet
- Assignment 2 Img PDFDocument7 pagesAssignment 2 Img PDFUtkrisht KashyapNo ratings yet
- m6 GameDocument21 pagesm6 GameMohammad Gulam AhamadNo ratings yet
- Arbori Binari de CautareDocument4 pagesArbori Binari de CautareCristianValentinNo ratings yet
- Math 10 Factoring Polynomials PDFDocument5 pagesMath 10 Factoring Polynomials PDF-Lady Kate-No ratings yet
- Machine Learning &deep Learning in Python &RDocument48 pagesMachine Learning &deep Learning in Python &RswatiNo ratings yet
- Model Sistem Antrian Pada Pelayanan Restoran Cepat Saji (Studi Kasus Di KFC Gajah Mada Kabupaten Jember)Document19 pagesModel Sistem Antrian Pada Pelayanan Restoran Cepat Saji (Studi Kasus Di KFC Gajah Mada Kabupaten Jember)Paulus MbabaNo ratings yet
- Revision Test III MathsDocument7 pagesRevision Test III MathsVaibhavMittalNo ratings yet
- Partial Adjustment ModelDocument3 pagesPartial Adjustment Modelnai09No ratings yet
- Problem-Solving: Solving Problems by SearchingDocument40 pagesProblem-Solving: Solving Problems by SearchingIhab Amer100% (1)
- Classical CryptoDocument16 pagesClassical CryptoMusic LandNo ratings yet
- Introduction To EconometricsDocument37 pagesIntroduction To EconometricsKathiravan GopalanNo ratings yet
- Conference PresentationDocument25 pagesConference PresentationAniqa KhurshidNo ratings yet
- Practice Exam 2Document4 pagesPractice Exam 2Mikey ZhouNo ratings yet
- Assignment No1 MLDocument5 pagesAssignment No1 MLakramullah khanNo ratings yet
- Numerical Derivatives Scilab 2Document59 pagesNumerical Derivatives Scilab 2Alejandro MoncadaNo ratings yet
- Control System Design by Frequency Response Using Matlab: Riyadh Nazar Ali AL-Gburi, Ali Saleh AzizDocument7 pagesControl System Design by Frequency Response Using Matlab: Riyadh Nazar Ali AL-Gburi, Ali Saleh AzizAmanNo ratings yet
- PID Control With Fuzzy Compensation For Hydroelectric Generating Unit - For ThanhDocument5 pagesPID Control With Fuzzy Compensation For Hydroelectric Generating Unit - For ThanhLê Trung DũngNo ratings yet
- Artificial Intelligence: Unit 1-IDocument24 pagesArtificial Intelligence: Unit 1-IANKUSH NEGINo ratings yet
- Context-Free Grammars 2. Parsing and Ambiguity 3. Context-Free Grammars and Programming Languages 4. Tutorial QuestionsDocument21 pagesContext-Free Grammars 2. Parsing and Ambiguity 3. Context-Free Grammars and Programming Languages 4. Tutorial QuestionsromeofatimaNo ratings yet
- Job Sequencing With Deadlines: The Problem Is Stated As BelowDocument24 pagesJob Sequencing With Deadlines: The Problem Is Stated As BelowVijay TrivediNo ratings yet
- 204184: Data Structures and Algorithms: SR - No Topic Reference Book UNIT I: Introduction To C and AlgorithmDocument3 pages204184: Data Structures and Algorithms: SR - No Topic Reference Book UNIT I: Introduction To C and Algorithmmadhuri nimseNo ratings yet
- Finite Difference Modeling of Acoustic Waves in Matlab: January 1999Document20 pagesFinite Difference Modeling of Acoustic Waves in Matlab: January 1999Steve HeartNo ratings yet
- Apollo Case QuestionsDocument2 pagesApollo Case QuestionsNitin VermaNo ratings yet
- CH 5Document4 pagesCH 5Maulik ChaudharyNo ratings yet
- CS 1505Document189 pagesCS 1505Akshit SharmaNo ratings yet
- Image Based Password AuthenticationDocument61 pagesImage Based Password AuthenticationA M Shahed HasanNo ratings yet
- Rainflow Analysis of Switching Markov LoadsDocument203 pagesRainflow Analysis of Switching Markov LoadsIvo LozićNo ratings yet