Download as pdf or txt
You might also like
- Optimal Power Flow Management For Grid PDFDocument12 pagesOptimal Power Flow Management For Grid PDFTrần Đình ChiếnNo ratings yet
- CISA Practice Questions IT GovernanceDocument4 pagesCISA Practice Questions IT GovernanceJoeFSabaterNo ratings yet
- Micro GridsDocument16 pagesMicro GridsJavier Ruiz ThorrensNo ratings yet
- Hierarchical Hybrid Architecture For Volt Var Control of Power Distribution GridsDocument8 pagesHierarchical Hybrid Architecture For Volt Var Control of Power Distribution Gridsmalekpour_ahmadNo ratings yet
- Disturbance Observer Based Fractional-Order Integral Sliding Mode Frequency Control Strategy For Interconnected Power SystemDocument11 pagesDisturbance Observer Based Fractional-Order Integral Sliding Mode Frequency Control Strategy For Interconnected Power Systemjitenderkumar_goyal28No ratings yet
- Distributed Optimal Energy Management in MicrogridsDocument10 pagesDistributed Optimal Energy Management in MicrogridsFlorin NastasaNo ratings yet
- Important 23 PDFDocument6 pagesImportant 23 PDFMuhammad Atiq Ur Rehman 22-FET/PHDEE/S19No ratings yet
- CIRED2009 0518 PaperDocument4 pagesCIRED2009 0518 PapersrivaishnaviNo ratings yet
- iEACH Paper v8Document9 pagesiEACH Paper v8malekpour_ahmadNo ratings yet
- Fuzzy Logic For Single AreaDocument11 pagesFuzzy Logic For Single Areaabata yohannesNo ratings yet
- Tertiary and Secondary Control Levels For Efficiency Optimization and System Damping in Droop Controlled DC-DC ConvertersDocument12 pagesTertiary and Secondary Control Levels For Efficiency Optimization and System Damping in Droop Controlled DC-DC ConvertersRiad TifaNo ratings yet
- Load Frequency Control in Three Area Power System Using Fuzzy Logic ControllerDocument6 pagesLoad Frequency Control in Three Area Power System Using Fuzzy Logic ControllerEditor IJTSRDNo ratings yet
- Control Scheme of Three-Level NPC Inverter For Integration of Renewable Energy Resources Into AC GridDocument12 pagesControl Scheme of Three-Level NPC Inverter For Integration of Renewable Energy Resources Into AC GridramunitNo ratings yet
- Foreword For The Special Section On Analysis and Simulation of Very Large Power SystemsDocument3 pagesForeword For The Special Section On Analysis and Simulation of Very Large Power Systemsmirko.tNo ratings yet
- rpg2 12088Document12 pagesrpg2 12088Akhilesh Kumar MishraNo ratings yet
- Hysteresis Model Predictive Control For High-Power Grid-Connected Inverters With Output LCL FilterDocument11 pagesHysteresis Model Predictive Control For High-Power Grid-Connected Inverters With Output LCL FilterDaniel PGNo ratings yet
- Uni®ed Power Ow Controller (UPFC) Model in The Framework of Interior Point Based Active and Reactive OPF ProcedureDocument7 pagesUni®ed Power Ow Controller (UPFC) Model in The Framework of Interior Point Based Active and Reactive OPF ProcedureChaibHabibNo ratings yet
- Stability Analysis and Controller Design of DC Microgrids With Constant Power LoadDocument8 pagesStability Analysis and Controller Design of DC Microgrids With Constant Power Loadpavan gangwarNo ratings yet
- Supervisory Power Quality Control Scheme For A Grid-Off MicrogridDocument8 pagesSupervisory Power Quality Control Scheme For A Grid-Off MicrogridRamya PothurNo ratings yet
- Distributed Secondary and Optimal Active Power Sharing Control For Islanded Microgrids With Communication DelaysDocument13 pagesDistributed Secondary and Optimal Active Power Sharing Control For Islanded Microgrids With Communication DelaysAmitMallickNo ratings yet
- Journalofelectricalengineering&Technologyvol.5, No.4, Pp.552 560,2010 ÎDocument14 pagesJournalofelectricalengineering&Technologyvol.5, No.4, Pp.552 560,2010 ÎgeethachowNo ratings yet
- Assessment of The Influence of Distributed Generation and Demand Side Management On Transmission System PerformanceDocument10 pagesAssessment of The Influence of Distributed Generation and Demand Side Management On Transmission System PerformanceArunchunai KarthiNo ratings yet
- Optimal Load Balancing and Capacitor Sizing and Siting of An Unbalanced Radial Distribution NetworkDocument6 pagesOptimal Load Balancing and Capacitor Sizing and Siting of An Unbalanced Radial Distribution Networkswapna44No ratings yet
- MS-993 Sara Ashfaq - Proof OK - 5-3-15Document7 pagesMS-993 Sara Ashfaq - Proof OK - 5-3-15SaraMuzaffarNo ratings yet
- Applied Sciences: Decision Optimization For Power Grid Operating Conditions With High-And Low-Voltage Parallel LoopsDocument18 pagesApplied Sciences: Decision Optimization For Power Grid Operating Conditions With High-And Low-Voltage Parallel Loopsyesar laftaNo ratings yet
- Firdaus 2019Document10 pagesFirdaus 2019Neethu Elizabeth MichaelNo ratings yet
- Generic 12-Bus Test System For Wind Power Integration StudiesDocument6 pagesGeneric 12-Bus Test System For Wind Power Integration StudiesJONATHAN RAFAEL MEZA CARRILLONo ratings yet
- Mixed Transient Stability Analysis Using AC and DC ModelsDocument7 pagesMixed Transient Stability Analysis Using AC and DC ModelsAbid Ali DogarNo ratings yet
- Valve Controller Design of Multi-Machine Power Systems Based On Adaptive Hamilton Minimax MethodDocument8 pagesValve Controller Design of Multi-Machine Power Systems Based On Adaptive Hamilton Minimax MethodsivaNo ratings yet
- Reconfiguration of Electric Distribution Systems: Hugh Rudnick Ildefonso Harnisch Raúl SanhuezaDocument8 pagesReconfiguration of Electric Distribution Systems: Hugh Rudnick Ildefonso Harnisch Raúl SanhuezaMohammed ShifulNo ratings yet
- 2012 PES PowerDocument8 pages2012 PES Powersf111No ratings yet
- Design of Electric Power System Studies Using MipowerDocument7 pagesDesign of Electric Power System Studies Using MipowerRonish ChandraNo ratings yet
- 1.optimal Placement of Multiple-Type FACTS Devices To Maximize Power System Loadability Using A Generic Graphical User InterfaceDocument3 pages1.optimal Placement of Multiple-Type FACTS Devices To Maximize Power System Loadability Using A Generic Graphical User InterfaceksbnNo ratings yet
- A Three-Phase Grid Tied SPV System With Adaptive DC Link Voltage For CPI Voltage VariationsDocument8 pagesA Three-Phase Grid Tied SPV System With Adaptive DC Link Voltage For CPI Voltage VariationsAayesha AhmedNo ratings yet
- Electric Power Systems Research: SciencedirectDocument10 pagesElectric Power Systems Research: SciencedirectHamsa DeepikaNo ratings yet
- Juan Manuel Mauricio 2008Document11 pagesJuan Manuel Mauricio 2008oualid zouggarNo ratings yet
- Converter Model For Representing Converter Interfaced Generation in Large Scale Grid SimulationsDocument9 pagesConverter Model For Representing Converter Interfaced Generation in Large Scale Grid SimulationsbenjaxxNo ratings yet
- Applied Sciences: Comparative Analysis of Current Control Techniques To Support Virtual Inertia ApplicationsDocument19 pagesApplied Sciences: Comparative Analysis of Current Control Techniques To Support Virtual Inertia Applicationswwahib2No ratings yet
- Simulation and Implementation of Grid-Connected InvertersDocument10 pagesSimulation and Implementation of Grid-Connected Invertersgiongan342No ratings yet
- Ieee GM Pre PrintDocument5 pagesIeee GM Pre PrintReza JalilzadehNo ratings yet
- Thu KaramDocument11 pagesThu KaramSumit VermaNo ratings yet
- Robust Power System Stabilizer Design For An Industrial Power System in Taiwan Using Linear Matrix Inequality TechniquesDocument6 pagesRobust Power System Stabilizer Design For An Industrial Power System in Taiwan Using Linear Matrix Inequality TechniquesDiego Martinez AranedaNo ratings yet
- Direct Backward/Forward Sweep Algorithm For Solving Load Power Flows in AC Droop-Regulated MicrogridsDocument10 pagesDirect Backward/Forward Sweep Algorithm For Solving Load Power Flows in AC Droop-Regulated MicrogridsPaul DayNo ratings yet
- Power Flow Method PaperDocument1 pagePower Flow Method Papermr ozairNo ratings yet
- Optimal - Network - Paper With Cover Page v2Document16 pagesOptimal - Network - Paper With Cover Page v2Marulasiddappa H BNo ratings yet
- Power 53: of TheDocument8 pagesPower 53: of TheTrương Xuân QuýNo ratings yet
- Short-Term Generation Scheduling With Transmission and Environmental Constraints Using An Augmented Lagrangian RelaxationDocument8 pagesShort-Term Generation Scheduling With Transmission and Environmental Constraints Using An Augmented Lagrangian Relaxationmajekodunmijoseph2No ratings yet
- 1 s2.0 S037877962200164X MainDocument12 pages1 s2.0 S037877962200164X MainFernando OrnelasNo ratings yet
- Quality-of-Service Aware Game Theory-Based Uplink Power Control For 5G Heterogeneous NetworksDocument8 pagesQuality-of-Service Aware Game Theory-Based Uplink Power Control For 5G Heterogeneous NetworksFanuel OlkebaNo ratings yet
- A Three-Phase Grid Tied SPV System With Adaptive DC Link Voltage For CPI Voltage VariationsDocument8 pagesA Three-Phase Grid Tied SPV System With Adaptive DC Link Voltage For CPI Voltage VariationsAshwani GargNo ratings yet
- Electric Power Systems Research: Distribution Power Ow Method Based On A Real Quasi-Symmetric MatrixDocument12 pagesElectric Power Systems Research: Distribution Power Ow Method Based On A Real Quasi-Symmetric MatrixSatishKumarInjetiNo ratings yet
- Robust Mathcal H Infty State Feedback Controllers Based On Linear Matrix Inequalities Applied To Grid-Connected ConvertersDocument11 pagesRobust Mathcal H Infty State Feedback Controllers Based On Linear Matrix Inequalities Applied To Grid-Connected ConvertersSivadharshini ANo ratings yet
- Literature Review On Relay Coordination Using Software TechniquesDocument4 pagesLiterature Review On Relay Coordination Using Software TechniquesMohitNo ratings yet
- Application of Multiple-Model Adaptive ControlDocument10 pagesApplication of Multiple-Model Adaptive ControlRabbuni GangavarapuNo ratings yet
- Rule The Joule An Energy Management Design Guide For Self-Powered SensorsDocument10 pagesRule The Joule An Energy Management Design Guide For Self-Powered SensorsstnaooqkqppgyiqewrNo ratings yet
- A Seminar Presentation ON Fault Tolerance and Security Using Facts Devices Presented by Nduaguba Ugochukwu T. 20061522013Document9 pagesA Seminar Presentation ON Fault Tolerance and Security Using Facts Devices Presented by Nduaguba Ugochukwu T. 20061522013Nkem OkonkwoNo ratings yet
- A Practical Integration of Automatic Generation Control and Demand ResponseDocument6 pagesA Practical Integration of Automatic Generation Control and Demand ResponseDaniel JesusiNo ratings yet
- A Unifying Energy-Based Approach To Stability of Power Grids With Market DynaminsDocument11 pagesA Unifying Energy-Based Approach To Stability of Power Grids With Market DynaminsHamed PourazadNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesFrom EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo ratings yet
- Engineering Design Research Methodology - 7.5 ECTS - PHD Course - Product Development Research LabDocument8 pagesEngineering Design Research Methodology - 7.5 ECTS - PHD Course - Product Development Research Laboctober87No ratings yet
- Demand Side Management-Literature Review and Performance ComparisonDocument11 pagesDemand Side Management-Literature Review and Performance Comparisonoctober87No ratings yet
- Adaptive Hierarchical Energy Management Design For A Plug-In Hybrid Electric VehicleDocument10 pagesAdaptive Hierarchical Energy Management Design For A Plug-In Hybrid Electric Vehicleoctober87No ratings yet
- ProblemsDocument9 pagesProblemsoctober87No ratings yet
- Em 909Document4 pagesEm 909october87No ratings yet
- 2 RectifierDocument12 pages2 Rectifieroctober87No ratings yet
- Em 330Document5 pagesEm 330october87No ratings yet
- COMMUNICATION3Document3 pagesCOMMUNICATION3october87No ratings yet
- Em 182Document6 pagesEm 182october87No ratings yet
- Blockchain TechnologiesDocument13 pagesBlockchain Technologiesoctober87No ratings yet
- Role of Optimization Techniques in MicrogridDocument22 pagesRole of Optimization Techniques in Microgridoctober87No ratings yet
- Micro Grid Stabilization Using The Virtual Synchronous Machine (VISMADocument6 pagesMicro Grid Stabilization Using The Virtual Synchronous Machine (VISMAoctober87No ratings yet
- Modeling and Control of Building-Integrated Microgrids For Optimal EnergyDocument21 pagesModeling and Control of Building-Integrated Microgrids For Optimal Energyoctober87No ratings yet
- Electric Power Systems Research: SciencedirectDocument12 pagesElectric Power Systems Research: Sciencedirectoctober87No ratings yet
- Comparison of Methods For Implementing Virtual Synchronous Machine OnDocument6 pagesComparison of Methods For Implementing Virtual Synchronous Machine Onoctober87No ratings yet
- Experimental Verification of Virtual InertiaDocument6 pagesExperimental Verification of Virtual Inertiaoctober87No ratings yet
- Shunt Power Active Filter Control Under Non Ideal Voltages ConditionsDocument6 pagesShunt Power Active Filter Control Under Non Ideal Voltages Conditionsoctober87No ratings yet
- Investigation of The Virtual SynchronousDocument6 pagesInvestigation of The Virtual Synchronousoctober87No ratings yet
- IET Seiscon GamsDocument7 pagesIET Seiscon Gamsoctober87No ratings yet
- Faria 2013Document9 pagesFaria 2013october87No ratings yet
- 21 Virtual Synchronous Generator A Control Strategy ToDocument7 pages21 Virtual Synchronous Generator A Control Strategy Tooctober87No ratings yet
- A Wireless Controller To Enhance DynamicDocument9 pagesA Wireless Controller To Enhance Dynamicoctober87No ratings yet
- COMMUNICATIONDocument9 pagesCOMMUNICATIONoctober87No ratings yet
- Module 2Document37 pagesModule 2october87No ratings yet
- COMMUNICATION1Document10 pagesCOMMUNICATION1october87No ratings yet
- Optimization Model For Expansion Planning of Distribution SystemDocument7 pagesOptimization Model For Expansion Planning of Distribution Systemoctober87No ratings yet
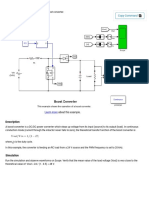
- Boost Converter - MATLAB & SimulinkDocument2 pagesBoost Converter - MATLAB & Simulinkoctober87No ratings yet
- A Technical Review On Control Strategies ForDocument6 pagesA Technical Review On Control Strategies Foroctober87No ratings yet
- Fall in Electricity Markets Prices in March Due To The Coronavirus Crisis - AleaSoft Energy ForecastingDocument14 pagesFall in Electricity Markets Prices in March Due To The Coronavirus Crisis - AleaSoft Energy Forecastingoctober87No ratings yet
- Module 1Document38 pagesModule 1october87No ratings yet
- Transformer DetailsDocument3 pagesTransformer DetailsbinodeNo ratings yet
- 1 s2.0 S0263876216304695 MainDocument8 pages1 s2.0 S0263876216304695 MainEva Olvera CoelloNo ratings yet
- MIZAR ALKOR UPS ManualDocument73 pagesMIZAR ALKOR UPS ManualAbdelwhab ElsaftyNo ratings yet
- C04-Wireless Telecommunication SystemsDocument98 pagesC04-Wireless Telecommunication SystemsSuganya PeriasamyNo ratings yet
- App Builder Host PiDocument414 pagesApp Builder Host PiSadot Enrique Castillo GalanNo ratings yet
- 10 - Imperfection in Solids Point Defects in MetalsDocument12 pages10 - Imperfection in Solids Point Defects in MetalshussainNo ratings yet
- TurbiinikalvotDocument32 pagesTurbiinikalvotAbdalmalek shamsanNo ratings yet
- NBTI Schroder NotesDocument47 pagesNBTI Schroder NotesRizwan AliNo ratings yet
- Hot Wire Ignition TesterDocument3 pagesHot Wire Ignition Testerlisun008No ratings yet
- 4-Bit Ripple Carry AdderDocument5 pages4-Bit Ripple Carry AdderBuvanesh KanthNo ratings yet
- Thermal Characterization of Textile MaterialsDocument40 pagesThermal Characterization of Textile Materialssubhaxyz9365No ratings yet
- Day / Night Sensor: DNS25 InstructionDocument1 pageDay / Night Sensor: DNS25 InstructionClea Marie Capacillo BatoonNo ratings yet
- Lab 4 WindTunnel Cylinder HandoutDocument7 pagesLab 4 WindTunnel Cylinder HandoutSteelcoverNo ratings yet
- The Fabrication of A Sandboni: A Coastal Cleaning SystemDocument57 pagesThe Fabrication of A Sandboni: A Coastal Cleaning SystemColeen TorresNo ratings yet
- C 8 F 390 Dae 8790 EcbDocument13 pagesC 8 F 390 Dae 8790 Ecbjaafar abdullahNo ratings yet
- Case 1: Soil: Project Title: Prince Majed Palace Design of Underground Water TankDocument5 pagesCase 1: Soil: Project Title: Prince Majed Palace Design of Underground Water TankafvilavilanoriegaNo ratings yet
- Containers and Container Terminal BrajdicaDocument4 pagesContainers and Container Terminal BrajdicaMihael LisakNo ratings yet
- Winergy Hybriddrive: The Power Pack For Wind TurbinesDocument2 pagesWinergy Hybriddrive: The Power Pack For Wind Turbinesbenjamin sassardNo ratings yet
- Meia Rab (14-3-2022)Document542 pagesMeia Rab (14-3-2022)Arif BinorikaNo ratings yet
- Project Manager in Qatar !Document1 pageProject Manager in Qatar !Pirartahana GanSaNo ratings yet
- Thermografy (Mts 2011 Reference)Document8 pagesThermografy (Mts 2011 Reference)Só de PassagemNo ratings yet
- 3614 RS&Document998 pages3614 RS&Francisco CruzNo ratings yet
- Lightning Protection Using Lfa-M-MyDocument16 pagesLightning Protection Using Lfa-M-MySusmita Panda71% (7)
- Airport BussinesDocument56 pagesAirport Bussinesjonmrx001No ratings yet
- All in OneDocument12 pagesAll in OneX800XLNo ratings yet
- MiVoice Business NCR - Tech Update - R8.0 Iss 1Document60 pagesMiVoice Business NCR - Tech Update - R8.0 Iss 1Guillaume HochainNo ratings yet
- Introduction To Electrical and Computer Engineering Lab ManualDocument124 pagesIntroduction To Electrical and Computer Engineering Lab Manualkstu1112No ratings yet
- KeTTHA - Incentives For Renewable Energy, Energy Efficiency & Green Buildings in MalaysiaDocument22 pagesKeTTHA - Incentives For Renewable Energy, Energy Efficiency & Green Buildings in MalaysiamicrefeeNo ratings yet
- Downhole PDFDocument84 pagesDownhole PDFVictor MartinezNo ratings yet