Download as pdf or txt
You might also like
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 4 out of 5 stars4/5 (2)
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- Trilogy of Wireless Power: Basic principles, WPT Systems and ApplicationsFrom EverandTrilogy of Wireless Power: Basic principles, WPT Systems and ApplicationsNo ratings yet
- An Isolated Single-Switch ZCS Resonant Converter With High Step-Up RatioDocument10 pagesAn Isolated Single-Switch ZCS Resonant Converter With High Step-Up RatiomokuanNo ratings yet
- Two-Loop Hysteretic Control of 3 Order Buck Converter: M. Veerachary and Deepen SharmaDocument8 pagesTwo-Loop Hysteretic Control of 3 Order Buck Converter: M. Veerachary and Deepen SharmaDeepen SharmaNo ratings yet
- Strong - 1Document11 pagesStrong - 1PT Orangiro Makmur JayaNo ratings yet
- Steady-State Analysis of An Interleaved Boost Converter With Coupled InductorsDocument9 pagesSteady-State Analysis of An Interleaved Boost Converter With Coupled InductorsSasanga HewagamaNo ratings yet
- A Novel Single Stage DC-AC Buck Boost Inverter For Solar Power ExtractionDocument6 pagesA Novel Single Stage DC-AC Buck Boost Inverter For Solar Power ExtractionsatheshkumarNo ratings yet
- Integrated Current Balancing Transformer Based Input-Parallel Output-Parallel LLC Resonant Converter ModulesDocument8 pagesIntegrated Current Balancing Transformer Based Input-Parallel Output-Parallel LLC Resonant Converter ModulesSh M AaqibNo ratings yet
- Soeiro 2010Document8 pagesSoeiro 2010wessamNo ratings yet
- An Interleaved Bi-Directional AC-DC ConverterDocument5 pagesAn Interleaved Bi-Directional AC-DC ConverterAsad HameedNo ratings yet
- Buck or Boost Tracking Power ConverterDocument4 pagesBuck or Boost Tracking Power ConverterBishoo ShenoudaNo ratings yet
- 2018 FPGA Control of A Three-Phase Three-Level T-Type NPC Grid-Connected Inverter With LCL FilterDocument6 pages2018 FPGA Control of A Three-Phase Three-Level T-Type NPC Grid-Connected Inverter With LCL Filterdaiduongxanh14113No ratings yet
- High-Efficiency, Grid-Tie Inverter For Photovoltaic ApplicationsDocument8 pagesHigh-Efficiency, Grid-Tie Inverter For Photovoltaic ApplicationsAlex TrubitsynNo ratings yet
- A Buck-Boost Common-Mode Transformerless Inverter For Photovoltaic ApplicationsDocument5 pagesA Buck-Boost Common-Mode Transformerless Inverter For Photovoltaic ApplicationsIndra PratamaNo ratings yet
- Frequency Analysis and Comparison of LCCL and CLLC Compensations For Capacitive Wireless Power TransferDocument6 pagesFrequency Analysis and Comparison of LCCL and CLLC Compensations For Capacitive Wireless Power TransferAhmed Moh'dNo ratings yet
- SIMO Boost Converter To Obtain Simultaneous AC and DC OutputDocument8 pagesSIMO Boost Converter To Obtain Simultaneous AC and DC OutputArjunSasiNo ratings yet
- High Efficiency DC-to-AC Power Inverter With Special DC InterfaceDocument6 pagesHigh Efficiency DC-to-AC Power Inverter With Special DC InterfaceDivyabharathi JanakiramanNo ratings yet
- Steady-State Analysis of An Interleaved Boost Converter With Coupled InductorsDocument9 pagesSteady-State Analysis of An Interleaved Boost Converter With Coupled InductorsNanda AzizahNo ratings yet
- Schonknecht 2003Document6 pagesSchonknecht 2003Mohammed AliNo ratings yet
- Buck or Boost Tracking Power ConverterDocument5 pagesBuck or Boost Tracking Power ConverterTân PhươngNo ratings yet
- Non-Conventional Supplying System For Induction Traction Motors From Diesel LocomotivesDocument4 pagesNon-Conventional Supplying System For Induction Traction Motors From Diesel LocomotivesSidahmed LarbaouiNo ratings yet
- A Hybrid Modulation Method For Single-Stage Soft-Switching Inverter Based On Series Resonant Converter PDFDocument12 pagesA Hybrid Modulation Method For Single-Stage Soft-Switching Inverter Based On Series Resonant Converter PDFwangNo ratings yet
- Ecce 2017 8096669Document8 pagesEcce 2017 8096669Emrah AYDINNo ratings yet
- Active Current Transformer Circuits For Low Distortion Sensing in Switched Mode Power ConvertersDocument10 pagesActive Current Transformer Circuits For Low Distortion Sensing in Switched Mode Power ConvertersDaniel De' SouzaNo ratings yet
- Un Inversor de Fuente de Corriente Monofásico Con Filtro de Potencia Activa para Sistemas Fotovoltaicos Conectados A La RedDocument8 pagesUn Inversor de Fuente de Corriente Monofásico Con Filtro de Potencia Activa para Sistemas Fotovoltaicos Conectados A La RedeliasNo ratings yet
- Common Electrical Engineering Interview Questions Asked in PSU InterviewsDocument7 pagesCommon Electrical Engineering Interview Questions Asked in PSU Interviewsrishabh100% (1)
- An Active-Clamp Push-Pull Converter For Battery Sourcing ApplicationsDocument9 pagesAn Active-Clamp Push-Pull Converter For Battery Sourcing ApplicationsYury KrivtsovNo ratings yet
- GOENAGA APEC2013 Contactless Transfert Energy Piezoelectric ActuatorDocument9 pagesGOENAGA APEC2013 Contactless Transfert Energy Piezoelectric Actuatorjasta 11No ratings yet
- Power Semiconductor Device NptelDocument14 pagesPower Semiconductor Device NptelMohammad Aminul IslamNo ratings yet
- A Parellel-SSHI Rectifier For Piezoelectric Energy HarvestingDocument2 pagesA Parellel-SSHI Rectifier For Piezoelectric Energy HarvestingwelsyaNo ratings yet
- One-Cycle-Controlled Bidirectional AC-to-DC Converter With Constant Power FactorDocument12 pagesOne-Cycle-Controlled Bidirectional AC-to-DC Converter With Constant Power FactorKrishna ReddyNo ratings yet
- A Cold-cathode Fluorescent Lamp Driver Circuit With Synchronous Primary-side Dimming ControlDocument7 pagesA Cold-cathode Fluorescent Lamp Driver Circuit With Synchronous Primary-side Dimming ControlxiaofanzaixianNo ratings yet
- Comparison of Transformerless Converter Topologies For Photovoltaic Application Concerning Efficiency and Mechanical VolumeDocument6 pagesComparison of Transformerless Converter Topologies For Photovoltaic Application Concerning Efficiency and Mechanical VolumeKarim EfthuNo ratings yet
- Power Electronicsall Five UnitDocument432 pagesPower Electronicsall Five Unitdj9017354100% (1)
- Power Electronic-EE IIT KharagpurDocument677 pagesPower Electronic-EE IIT Kharagpuraldipdg95% (19)
- IJE - Volume 27 - Issue 1 - Pages 123-130Document8 pagesIJE - Volume 27 - Issue 1 - Pages 123-130TamilselvanNo ratings yet
- L 1 (SSG) (Pe) ( (Ee) Nptel)Document201 pagesL 1 (SSG) (Pe) ( (Ee) Nptel)Neeraj SinghalNo ratings yet
- Design and Implementation of A 100 KW Sic Filter-Less PV Inverter With 5 KW/KG Power Density and 99.2% Cec EfficiencyDocument6 pagesDesign and Implementation of A 100 KW Sic Filter-Less PV Inverter With 5 KW/KG Power Density and 99.2% Cec EfficiencyadnantanNo ratings yet
- Bidirectional LLC Resonant Converter For Energy Storage ApplicationsDocument7 pagesBidirectional LLC Resonant Converter For Energy Storage ApplicationsRodrigo MesquitaNo ratings yet
- Resonant DC Link InverterDocument9 pagesResonant DC Link InverterSenthil KumarNo ratings yet
- Unidirectional Step-Up Ultra Sparse Matrix Converter For Integration of Wind Energy Resources To MicrogridsDocument5 pagesUnidirectional Step-Up Ultra Sparse Matrix Converter For Integration of Wind Energy Resources To MicrogridsChetan GhatageNo ratings yet
- DQ Transform Based Current Controller For Single-Phase Grid Connected InverterDocument6 pagesDQ Transform Based Current Controller For Single-Phase Grid Connected InverterMinh Tạ ĐứcNo ratings yet
- Interleaved_Soft-Switching_Boost_Converter_for_Photovoltaic_Power-Generation_SystemDocument9 pagesInterleaved_Soft-Switching_Boost_Converter_for_Photovoltaic_Power-Generation_SystemVanSupavanNo ratings yet
- RELATION BETWEEN FIRING ANGLE OF THREE-PHASE RectifierDocument7 pagesRELATION BETWEEN FIRING ANGLE OF THREE-PHASE Rectifier01666754614No ratings yet
- QR Flyback ConverterDocument27 pagesQR Flyback ConverterAndrea SanninoNo ratings yet
- Isolated Bidirectional Full-Bridge DCDC Converter With A Flyback SnubberDocument8 pagesIsolated Bidirectional Full-Bridge DCDC Converter With A Flyback SnubberHsekum RamukNo ratings yet
- Current Mode Control of A Solar Inverter With MPPT ADOPTIVE AlgorithmDocument7 pagesCurrent Mode Control of A Solar Inverter With MPPT ADOPTIVE AlgorithmAnonymous afzpkOo3No ratings yet
- High Power Matrix Converter For Wind Power Generation ApplicationsDocument6 pagesHigh Power Matrix Converter For Wind Power Generation ApplicationsChetan GhatageNo ratings yet
- A Bidirectional Isolated DC-DC Converter As ADocument9 pagesA Bidirectional Isolated DC-DC Converter As ANabil AhmedNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- It Is Quite Another Electricity: Transmitting by One Wire and Without GroundingFrom EverandIt Is Quite Another Electricity: Transmitting by One Wire and Without GroundingNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Construction Project Management 101 - ChecklistDocument5 pagesConstruction Project Management 101 - ChecklistUsman ShahidNo ratings yet
- E GadraDocument1 pageE GadraDana JensenNo ratings yet
- Chap Iv LessonDocument25 pagesChap Iv LessonKriezha Gavia ZamoraNo ratings yet
- Enzymes: Afrodita Fuentes Biology High School: Lesson Plan Topic: Name Class: Grade Level: A. Major ConceptsDocument12 pagesEnzymes: Afrodita Fuentes Biology High School: Lesson Plan Topic: Name Class: Grade Level: A. Major ConceptsLenor TunacNo ratings yet
- Petron Risk ManagementDocument29 pagesPetron Risk ManagementfritzgeraldbulanNo ratings yet
- DTL Summer Training ReportDocument63 pagesDTL Summer Training ReportARYAN ANo ratings yet
- 3D Seismic Survey FOR Ratawi Oil Field Area in Southern IraqDocument39 pages3D Seismic Survey FOR Ratawi Oil Field Area in Southern IraqAkhilaNo ratings yet
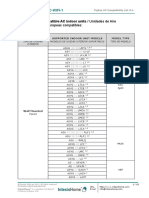
- IntesisHome FJ-RC-WIFI-1 Compatibility ListDocument15 pagesIntesisHome FJ-RC-WIFI-1 Compatibility ListFabian VázquezNo ratings yet
- Ezekiel T. Mostiero Doctor of JurisprudenceDocument19 pagesEzekiel T. Mostiero Doctor of JurisprudenceJewel Ishi RomeroNo ratings yet
- Lesson No.5. Continuous Random VariableDocument3 pagesLesson No.5. Continuous Random VariableNguyễn Việt Hoàng BI11-095No ratings yet
- Unit 8 Rate of Reaction: Summary QuestionsDocument2 pagesUnit 8 Rate of Reaction: Summary QuestionsLei YinNo ratings yet
- 1 s2.0 S0016236118304976 MainextDocument19 pages1 s2.0 S0016236118304976 MainextPriyam NayakNo ratings yet
- AdalineDocument28 pagesAdalineAnonymous 05P3kMINo ratings yet
- Airport Management Individual AssignmentDocument12 pagesAirport Management Individual AssignmentMuhammad AfifNo ratings yet
- Iecq PublicationDocument31 pagesIecq PublicationMartin AnsongNo ratings yet
- Cement Rotary Kiln Questions & AnswersDocument37 pagesCement Rotary Kiln Questions & AnswersNael95% (19)
- PNP and DSWD PartnershipDocument29 pagesPNP and DSWD Partnershiproneldayo62100% (1)
- Cementing Design - FinalDocument27 pagesCementing Design - FinalBIGBOAZ XX100% (1)
- Dzexams 1am Anglais 247570Document5 pagesDzexams 1am Anglais 247570natalipaskalNo ratings yet
- Rashtrasant Tukadoji Maharaj Nagpur UniversityDocument1 pageRashtrasant Tukadoji Maharaj Nagpur UniversityAkash RautNo ratings yet
- CHAPTER 1 The Human Body An OrientationDocument78 pagesCHAPTER 1 The Human Body An OrientationLyndee MayNo ratings yet
- Cegesoft Peel (OPP)Document1 pageCegesoft Peel (OPP)paromanikNo ratings yet
- Tooling Guide For High Reliability Electrical Systems Rev. 11 Ver. 1Document202 pagesTooling Guide For High Reliability Electrical Systems Rev. 11 Ver. 1AndersonNo ratings yet
- RPH - Based On Suchman Inquiry: Concept(s) IntroducedDocument7 pagesRPH - Based On Suchman Inquiry: Concept(s) IntroducedpuvanesweranNo ratings yet
- Annex B: List of Officers 2019-Present List of Officers 2019-PresentDocument5 pagesAnnex B: List of Officers 2019-Present List of Officers 2019-PresentRamilArtatesNo ratings yet
- Bishop Cotton Women's Christian College: Rathus Assertiveness ScaleDocument14 pagesBishop Cotton Women's Christian College: Rathus Assertiveness ScaleKarthik BharadwajNo ratings yet
- RajagopalanDocument17 pagesRajagopalanSamuel Lozano JuárezNo ratings yet
- Aphasia in Left HandersDocument2 pagesAphasia in Left Handerskeihoina keihoinaNo ratings yet
- Thermodynamics: Chapter TopicDocument29 pagesThermodynamics: Chapter TopicMelaku TamiratNo ratings yet
- Unit 10 - JobsDocument5 pagesUnit 10 - JobsFabiola MamaniNo ratings yet