Download as pdf or txt
You might also like
- MA5801S-GP16 Product Datasheet 01Document8 pagesMA5801S-GP16 Product Datasheet 01Samuel NesibuNo ratings yet
- Eric Coomer: Pawn, Plant or Perp?Document118 pagesEric Coomer: Pawn, Plant or Perp?Chris BentelNo ratings yet
- Dijkstras AlgorithmDocument20 pagesDijkstras AlgorithmMahmoud Al-EwiwiNo ratings yet
- Amkasyn Device Description Servo Drives KE/KW Compact Power Supplies KE, KES, KEN Compact Inverters KW, KWDDocument212 pagesAmkasyn Device Description Servo Drives KE/KW Compact Power Supplies KE, KES, KEN Compact Inverters KW, KWDMr.K chNo ratings yet
- Source Code Algoritma Greedy: Nama: M Hendro Junawarko NPM: 18312215Document5 pagesSource Code Algoritma Greedy: Nama: M Hendro Junawarko NPM: 18312215Master Of NothingNo ratings yet
- Source Code Algoritma Astar: Nama: M Hendro Junawarko NPM: 18312215Document4 pagesSource Code Algoritma Astar: Nama: M Hendro Junawarko NPM: 18312215Master Of NothingNo ratings yet
- Dfs Sis 457Document3 pagesDfs Sis 457Aldo LopezNo ratings yet
- Espadero, GraphsDocument3 pagesEspadero, GraphsAndrei EspaderoNo ratings yet
- Implementing An Array: Difference Between Var, Const and LetDocument12 pagesImplementing An Array: Difference Between Var, Const and LetHarshita SharmaNo ratings yet
- Graph AnujDocument15 pagesGraph AnujparthavikhatuNo ratings yet
- Source Code Algoritma BFSDocument3 pagesSource Code Algoritma BFSMaster Of NothingNo ratings yet
- Artificial Intelligence: NameDocument15 pagesArtificial Intelligence: NameHusnain IqbalNo ratings yet
- Queue Topsort GraphsDocument7 pagesQueue Topsort Graphsexperimento unoNo ratings yet
- Package GrafoExercicioDocument12 pagesPackage GrafoExercicioImVelloster46No ratings yet
- Implementation of Ford Fulkerson AlgorithmDocument18 pagesImplementation of Ford Fulkerson AlgorithmTanmay PatidarNo ratings yet
- Dijastra Import Import Import Import: Vertex Comparable VertexDocument4 pagesDijastra Import Import Import Import: Vertex Comparable Vertexalmibarado86yNo ratings yet
- Dav Institute of Engineering & Technology Jalandhar: Artificial IntelligenceDocument11 pagesDav Institute of Engineering & Technology Jalandhar: Artificial IntelligenceKaran GuptaNo ratings yet
- 24 ShortestPathAlgorithm-091Document12 pages24 ShortestPathAlgorithm-091Samia MahbubNo ratings yet
- Source Code Algoritma DFSDocument3 pagesSource Code Algoritma DFSMaster Of NothingNo ratings yet
- DijkstraShortestPath (Jung2 2.0 API)Document2 pagesDijkstraShortestPath (Jung2 2.0 API)daniele4neNo ratings yet
- MetroDocument10 pagesMetroMOUNIKA MADATHALANo ratings yet
- Name: Avinash Tiwari ROLL NO,.:2100290110041 DAA LAB: Dijkstra AlgorithmDocument6 pagesName: Avinash Tiwari ROLL NO,.:2100290110041 DAA LAB: Dijkstra Algorithmsaurabh tiwariNo ratings yet
- Question No 1:: Part (A)Document7 pagesQuestion No 1:: Part (A)Zainab IshtiaqNo ratings yet
- Proyecto Coursera UCSD GraphsDocument19 pagesProyecto Coursera UCSD GraphsEdson Schiffer StarrkNo ratings yet
- Deepak 49 A2Document6 pagesDeepak 49 A2saurabh tiwariNo ratings yet
- Assignment 5Document64 pagesAssignment 5Sheetal AnandNo ratings yet
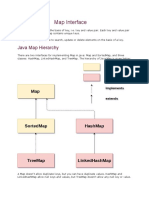
- Map InterfaceDocument30 pagesMap InterfaceDaman RajNo ratings yet
- CP7111-Advanced Data Structures Laboratory ManualDocument76 pagesCP7111-Advanced Data Structures Laboratory ManualHussain BibiNo ratings yet
- Graphs: CS 308 - Data StructuresDocument38 pagesGraphs: CS 308 - Data StructuresAbhilash RudraNo ratings yet
- AI AssignmentDocument16 pagesAI AssignmentSamir ShresthaNo ratings yet
- Lab ProgramsDocument20 pagesLab ProgramsParinitha B SNo ratings yet
- Graph SearchingDocument4 pagesGraph SearchingqwertyuiopoNo ratings yet
- Fickry Bil Iman - Alterra Academy - Jawaban Tes TulisDocument9 pagesFickry Bil Iman - Alterra Academy - Jawaban Tes TulisAndi FitriantoNo ratings yet
- Document 1Document106 pagesDocument 1Arpit SinghNo ratings yet
- Cs3491 Aiml RecordDocument46 pagesCs3491 Aiml Recordkarthikprasanna80No ratings yet
- BFS AlgorithmDocument15 pagesBFS AlgorithmTrupti SahooNo ratings yet
- Amazon Interview Questions With Solutions JavaDocument13 pagesAmazon Interview Questions With Solutions Java23f1001573No ratings yet
- M.E. Data Structures LabDocument70 pagesM.E. Data Structures LabDharma LingamNo ratings yet
- Map InterfaceDocument29 pagesMap InterfaceMax TondonNo ratings yet
- Graph Traversals - NotesDocument7 pagesGraph Traversals - Notessathwik vaguNo ratings yet
- Lecture 7Document26 pagesLecture 7Md.Nazmul Abdal ShourovNo ratings yet
- Dijkestra Algorithm PPT L-20Document19 pagesDijkestra Algorithm PPT L-20Saket AnandNo ratings yet
- LeetcodeDocument96 pagesLeetcodePratik PatelNo ratings yet
- Class Person: String StringDocument9 pagesClass Person: String Stringpmreddy01No ratings yet
- Vector2 Int Vector2 Int Int Vector2 Vector2 Vector2 Vector2Document4 pagesVector2 Int Vector2 Int Int Vector2 Vector2 Vector2 Vector2faiza kanwalNo ratings yet
- Program 3Document13 pagesProgram 3alphonseabhiNo ratings yet
- Search Algorithms in AI6Document17 pagesSearch Algorithms in AI6jhn75070No ratings yet
- Unit 3 DSADocument20 pagesUnit 3 DSAronak828743No ratings yet
- MessageDocument4 pagesMessageMyname JeffNo ratings yet
- Dsa Assignment-4 Soutik DeyDocument21 pagesDsa Assignment-4 Soutik DeySoutik DeyNo ratings yet
- 21BCE8722 - Aryan ShindeDocument8 pages21BCE8722 - Aryan ShindearyxnshindeNo ratings yet
- Merged ExperimentsDocument14 pagesMerged ExperimentsIndian HackerNo ratings yet
- Map InterfaceDocument34 pagesMap InterfaceVenu DNo ratings yet
- CodeDocument143 pagesCodeAdil Jutt GNo ratings yet
- Yooooct 2Document31 pagesYooooct 2chiraggarg032No ratings yet
- AI Lab Student Sample File With Pages RemovedDocument14 pagesAI Lab Student Sample File With Pages Removedvishalr2227No ratings yet
- Digital Assignment - 1: Name: M Bhanu Prakash REG NUMBER: 19MID0088Document13 pagesDigital Assignment - 1: Name: M Bhanu Prakash REG NUMBER: 19MID0088M puneethNo ratings yet
- Assignment - 1: Q1. Write A Javascript Code For Stack Implementation Using Linked ListDocument20 pagesAssignment - 1: Q1. Write A Javascript Code For Stack Implementation Using Linked Listchaitanya deshmukhNo ratings yet
- Backtracking: Consider The N Queens Problem - Discover If and How N Queens Can Be Placed On AnDocument11 pagesBacktracking: Consider The N Queens Problem - Discover If and How N Queens Can Be Placed On AnAbhijit GovekarNo ratings yet
- Integer To StringDocument17 pagesInteger To Stringaiscool noodleNo ratings yet
- Ai&Ml Lab Manual r21Document45 pagesAi&Ml Lab Manual r21Saravanakumar MNo ratings yet
- Chapter 9 Data Structure SlideDocument38 pagesChapter 9 Data Structure SlidegabyNo ratings yet
- SAA7130HLDocument48 pagesSAA7130HLpekiilicNo ratings yet
- FND GFM 72339741Document4 pagesFND GFM 72339741Geetha ReddyNo ratings yet
- 2 Get Started Building With Power BIDocument23 pages2 Get Started Building With Power BIJY100% (1)
- APA ReferencesDocument32 pagesAPA ReferencesAhanaf RashidNo ratings yet
- Mainframe Administration MaterialDocument38 pagesMainframe Administration MaterialBanu Prakash T M100% (1)
- Model Name: GA-H61-S3: Vcore Cpu - VTTDocument34 pagesModel Name: GA-H61-S3: Vcore Cpu - VTTsỹ QuốcNo ratings yet
- ADC For GYRATOR IIDocument3 pagesADC For GYRATOR IIramesh krishnaNo ratings yet
- E - 20221018 MT940 ConfDocument4 pagesE - 20221018 MT940 ConfCarlos GuzmanNo ratings yet
- IntroDocument164 pagesIntroPerubus SoyuzNo ratings yet
- Creating A Repository in Github - Duration: 2 Days: Jala TechnologiesDocument9 pagesCreating A Repository in Github - Duration: 2 Days: Jala TechnologiesBalu100% (1)
- Cụm Chuyên Môn 1 Kỳ Luyện Tập Thi Trung Học Phổ Thông Quốc Gia Năm 2017 Môn: Tiếng Anh Mã đề thi 420Document4 pagesCụm Chuyên Môn 1 Kỳ Luyện Tập Thi Trung Học Phổ Thông Quốc Gia Năm 2017 Môn: Tiếng Anh Mã đề thi 420Truong Thi Ha Trang 1KT-19No ratings yet
- Time-Domain Approach To Microwave Circuit Modeling: View General Relations Between TLM and FDTD (Invited Article)Document11 pagesTime-Domain Approach To Microwave Circuit Modeling: View General Relations Between TLM and FDTD (Invited Article)asddeettrgbfbfbftggrg ergrtertererefrerrNo ratings yet
- 01 Handout 1Document5 pages01 Handout 1Abbegail CalinaoNo ratings yet
- Hungarian NotationDocument6 pagesHungarian NotationmelpaniNo ratings yet
- SE / Se: Single Equipment ControllerDocument2 pagesSE / Se: Single Equipment ControllerEssam MohamedNo ratings yet
- N700-Programing 1 ManualDocument317 pagesN700-Programing 1 ManualAndre CostaNo ratings yet
- Kaiju Fan 10 - DjvuDocument171 pagesKaiju Fan 10 - DjvunatrubuclathrmacomNo ratings yet
- Lecture L3.ViewDocument136 pagesLecture L3.ViewSarah KimNo ratings yet
- Configuring The Oracle Network EnvironmentDocument41 pagesConfiguring The Oracle Network EnvironmentMahadev NaiknavreNo ratings yet
- Shoaib CVDocument2 pagesShoaib CVashfaqNo ratings yet
- New Webshare CodeDocument2 pagesNew Webshare CodevostderzheNo ratings yet
- How To Choose The Most Efficient Data Type To-Many Associations PDFDocument3 pagesHow To Choose The Most Efficient Data Type To-Many Associations PDFKhanNo ratings yet
- Operating Instructions: Inspection Machine CUB Machine Number: I 1347Document116 pagesOperating Instructions: Inspection Machine CUB Machine Number: I 1347Justine MarashanyeNo ratings yet
- Ai & ML - ModuleDocument35 pagesAi & ML - ModulePrem PatilNo ratings yet
- CHP 3 Image Enhancement in The Spatial Domain 1 MinDocument33 pagesCHP 3 Image Enhancement in The Spatial Domain 1 MinAbhijay Singh JainNo ratings yet
- MPMC 1,5,6 & 2 OkDocument128 pagesMPMC 1,5,6 & 2 OkLALRAZNo ratings yet
- Webleaflet ENG Amiko TRF-800 v180328Document2 pagesWebleaflet ENG Amiko TRF-800 v180328mahmoudvich65No ratings yet