Download as pdf or txt
You might also like
- CXC-CSEC Physics - Electricity and MagnetismDocument22 pagesCXC-CSEC Physics - Electricity and Magnetismdela278% (9)
- 3.sheath Induced Voltage - 10387-InDDocument11 pages3.sheath Induced Voltage - 10387-InDBijaya Kumar Mohanty100% (1)
- Boeing 747 - Aerodynamic AnalysisDocument59 pagesBoeing 747 - Aerodynamic AnalysisJeannine Harrison100% (1)
- Aerodynamic Optimization of WingsDocument21 pagesAerodynamic Optimization of WingsMarcos SoarNo ratings yet
- 2.1 Introduction To Flight Control SystemsDocument38 pages2.1 Introduction To Flight Control SystemsFanhang ZhangNo ratings yet
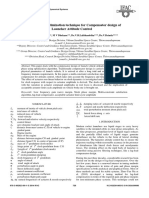
- Application of Optimization Technique For Compensator Design ofDocument8 pagesApplication of Optimization Technique For Compensator Design ofGayathri GnanaiyaNo ratings yet
- Stability Analysis of Longitudinal Dynamics of Hovering Flapping Mavs/InsectsDocument20 pagesStability Analysis of Longitudinal Dynamics of Hovering Flapping Mavs/InsectsAhmed ElsadekNo ratings yet
- 13680-Article Text-23920-1-10-20201008Document10 pages13680-Article Text-23920-1-10-20201008MOHAMMED JAWADNo ratings yet
- Roll Angle Stabilization of Fixed Wing UDocument12 pagesRoll Angle Stabilization of Fixed Wing UАлуа ЕрмековаNo ratings yet
- Ali 2019 IOP Conf. Ser. Mater. Sci. Eng. 610 012034Document13 pagesAli 2019 IOP Conf. Ser. Mater. Sci. Eng. 610 012034Abdrahmane BenaouadNo ratings yet
- Measurement and Estimation of The Angle of Attack and The Angle of SideslipDocument6 pagesMeasurement and Estimation of The Angle of Attack and The Angle of SideslipzonadosNo ratings yet
- Model-Based Wind Estimation For A Hovering VTOL Tailsitter UAVDocument8 pagesModel-Based Wind Estimation For A Hovering VTOL Tailsitter UAVcesarNo ratings yet
- 2015 - Flight Control Law Design Criteria For The Transition Phase For A Tiltwing Aircraft Using Multi-Objective Parameter SynthesisDocument14 pages2015 - Flight Control Law Design Criteria For The Transition Phase For A Tiltwing Aircraft Using Multi-Objective Parameter Synthesisahmad.yasser123456No ratings yet
- Effect of Airplane Tail Aspect Ratio OnDocument11 pagesEffect of Airplane Tail Aspect Ratio OnMOHAMMED JAWADNo ratings yet
- Three Dimensional Guidance and Control For Ground Moving Target Tracking by A QuadrotorDocument28 pagesThree Dimensional Guidance and Control For Ground Moving Target Tracking by A QuadrotorjusticembamNo ratings yet
- Three Dimensional Guidance and Control For Ground Moving Target Tracking by A QuadrotorDocument28 pagesThree Dimensional Guidance and Control For Ground Moving Target Tracking by A QuadrotorjusticembamNo ratings yet
- Aerodynamics of Tandem Wing Aircraft: Illia KryvokhatkoDocument183 pagesAerodynamics of Tandem Wing Aircraft: Illia KryvokhatkoAlessandro CavatortaNo ratings yet
- HD-ASSR-Kinematic and Aerodynamic Modeling of Flapping Wing Ornithopter-Procedia-2012Document16 pagesHD-ASSR-Kinematic and Aerodynamic Modeling of Flapping Wing Ornithopter-Procedia-2012Deb PradhanNo ratings yet
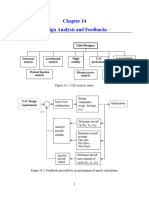
- CH 14 FiguresDocument10 pagesCH 14 FiguresamroushararaNo ratings yet
- Modeling and Simulation of 9-DOF Parafoil-Payload System Flight DynamicsDocument26 pagesModeling and Simulation of 9-DOF Parafoil-Payload System Flight DynamicsMano PrakashNo ratings yet
- 2011 - Design and Wind Tunnel Tests of A Tiltwing UAVDocument11 pages2011 - Design and Wind Tunnel Tests of A Tiltwing UAVahmad.yasser123456No ratings yet
- Aiac 2007 073Document18 pagesAiac 2007 073Mehreen AzamNo ratings yet
- 023 - Chapter 5 - L16 PDFDocument12 pages023 - Chapter 5 - L16 PDFKunhu MonuNo ratings yet
- Aviat Book EnglishDocument24 pagesAviat Book EnglishdaniilNo ratings yet
- Design and Fabrication of Self Stabilized Electric Powered Flying Wing AircraftDocument94 pagesDesign and Fabrication of Self Stabilized Electric Powered Flying Wing Aircraft201901No ratings yet
- Helicopter Firing-Rocket Performance and Pilot S Workload Evaluation From Flight DataDocument6 pagesHelicopter Firing-Rocket Performance and Pilot S Workload Evaluation From Flight DataGustavo Rothmund BolfeNo ratings yet
- Uso de DadosDocument16 pagesUso de DadosRodrigoLemesNo ratings yet
- AE 4600 Aircraft Stability & Control: Department of Mechanical & Aerospace EngineeringDocument9 pagesAE 4600 Aircraft Stability & Control: Department of Mechanical & Aerospace Engineeringslimshady_KONo ratings yet
- Article AEAT Vertical TailDocument21 pagesArticle AEAT Vertical TailscribdownloaderpassNo ratings yet
- Kite Engineering With Calculations Guide Sheet 1Document5 pagesKite Engineering With Calculations Guide Sheet 1Rafael AndradeNo ratings yet
- Real-Time Simulation System For UAV Based On Matlab/SimulinkDocument6 pagesReal-Time Simulation System For UAV Based On Matlab/SimulinkEngr Jawad ZakirNo ratings yet
- Lectuers 6-8 (Compatibility Mode)Document34 pagesLectuers 6-8 (Compatibility Mode)minimailNo ratings yet
- Modeling and Implementation of Hexacopter Guidance System Using Fuzzy Logic Control Under Wind DisturbanceDocument6 pagesModeling and Implementation of Hexacopter Guidance System Using Fuzzy Logic Control Under Wind DisturbanceDwi KrizyNo ratings yet
- Ground EffectDocument16 pagesGround Effectngokhoi171203No ratings yet
- National Advisory Committee For Aeronautics: Technical NoteDocument38 pagesNational Advisory Committee For Aeronautics: Technical NoteFilipe PaivaNo ratings yet
- Design of A Wing With Bell-Shaped Span-Load Using VLM MethodDocument4 pagesDesign of A Wing With Bell-Shaped Span-Load Using VLM Methodrajesh2709No ratings yet
- Guidance and Control of Standoff Air-To-surface Carrier VehicleDocument27 pagesGuidance and Control of Standoff Air-To-surface Carrier Vehiclewovaj97072No ratings yet
- Airplane Flight Dynamics and Automatic Flight Controls Roskam - 27.02.2024Document55 pagesAirplane Flight Dynamics and Automatic Flight Controls Roskam - 27.02.2024Merve SümerNo ratings yet
- Agri-Drone Recoil PDFDocument10 pagesAgri-Drone Recoil PDFChiru knNo ratings yet
- Gourinat 468Document13 pagesGourinat 468Yonghui XUNo ratings yet
- 1-Avion No TripuladoDocument7 pages1-Avion No TripuladoJuan Alejandro Cañas ColoradoNo ratings yet
- FDIR Assignment Specification DocumentDocument3 pagesFDIR Assignment Specification Documentzaigham mohiudinNo ratings yet
- Mill inDocument149 pagesMill inMuhammad RizwanNo ratings yet
- Target Geo-Localization Based On Camera Vision Simulation of UAVDocument11 pagesTarget Geo-Localization Based On Camera Vision Simulation of UAVJNo ratings yet
- Strip TheoryDocument3 pagesStrip TheoryPraveenkumar_UNo ratings yet
- Articulo Final - Jonathan HolguinoDocument10 pagesArticulo Final - Jonathan HolguinoYash Kumar Singh Jha ae19b016No ratings yet
- DIFFERENTTYPESOFWINGLETSANDTHEIRCORRESPONDINGVORTICESDocument23 pagesDIFFERENTTYPESOFWINGLETSANDTHEIRCORRESPONDINGVORTICESqwertyuiopNo ratings yet
- Analysis of Emergency Landing Load of Civil Aircraft With Single Main Landing Gear Extended LandingDocument4 pagesAnalysis of Emergency Landing Load of Civil Aircraft With Single Main Landing Gear Extended LandingGuilherme Mazetto TellesNo ratings yet
- Estimation of Projected Surface Area of Irregularly Shaped FragmentsDocument12 pagesEstimation of Projected Surface Area of Irregularly Shaped FragmentsMohd NaimuddinNo ratings yet
- 1 s2.0 S0029801823008624 MainDocument20 pages1 s2.0 S0029801823008624 MainSHIVAM KUMAR CHOUDHARYNo ratings yet
- Aerodynamic Characteristic of SSTO Vehicle at Low Subsonic SpeedsDocument9 pagesAerodynamic Characteristic of SSTO Vehicle at Low Subsonic SpeedsJohnNo ratings yet
- Impact Point Prediction Guidance Based On IterativDocument15 pagesImpact Point Prediction Guidance Based On IterativAleksa TrifkovićNo ratings yet
- Calculating Yaw of Repose Spin Drift FULLDocument48 pagesCalculating Yaw of Repose Spin Drift FULLChandan JhaNo ratings yet
- Analysis of Airfoil Flow Pattern Using CFD IJERTCONV6IS14048Document5 pagesAnalysis of Airfoil Flow Pattern Using CFD IJERTCONV6IS14048Vinay KashyapNo ratings yet
- CoefficientOfDrag Report Updated2Document2 pagesCoefficientOfDrag Report Updated2DEVANSH DHRAFANINo ratings yet
- Observer-Based Super Twisting Sliding Mode Control For Fixed Wing Unmanned Aerial VehicleDocument6 pagesObserver-Based Super Twisting Sliding Mode Control For Fixed Wing Unmanned Aerial VehiclemailtosshettyNo ratings yet
- Mohammed Ahmed Rasheed & Ahmed Adnan AL-QaisyDocument19 pagesMohammed Ahmed Rasheed & Ahmed Adnan AL-QaisyAhmed OmarNo ratings yet
- Mathematical Modelling and Attitude Control of Quadcopter Based On Classical ControllerDocument7 pagesMathematical Modelling and Attitude Control of Quadcopter Based On Classical ControllerdrenridaNo ratings yet
- Flapping WingDocument31 pagesFlapping Wingnanjappa hebbaleNo ratings yet
- Textbook Advanced Flight Dynamics With Elements of Flight Control 1St Edition Nandan K Sinha Ebook All Chapter PDFDocument53 pagesTextbook Advanced Flight Dynamics With Elements of Flight Control 1St Edition Nandan K Sinha Ebook All Chapter PDFmichelle.duncklee612100% (24)
- The Whole Trajectory Simulation of Cruise Missile Based On Inertial Navigation Error ModelDocument5 pagesThe Whole Trajectory Simulation of Cruise Missile Based On Inertial Navigation Error ModelBohdan MNo ratings yet
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- Wave BasicsDocument56 pagesWave BasicsTHEcamobackpackNo ratings yet
- Catalogo Piscinas Seko 2015Document26 pagesCatalogo Piscinas Seko 2015Bird31No ratings yet
- CFX-Intro 17.0 Lecture07 MovingZonesDocument41 pagesCFX-Intro 17.0 Lecture07 MovingZonesFabiano LebkuchenNo ratings yet
- Phy105 Secondlaw Entropy2Document36 pagesPhy105 Secondlaw Entropy2boluwatifeajiboye371No ratings yet
- Overview of The Project 1.1Document44 pagesOverview of The Project 1.1sharmila saravananNo ratings yet
- Gemss e 30 r01 (0) MV CablesDocument6 pagesGemss e 30 r01 (0) MV CablesAdel KlkNo ratings yet
- Process Gas VelocityDocument3 pagesProcess Gas VelocityAbhishekNo ratings yet
- Chapter 2 (Electrostatic Potential and Capacitance) UnsolvedDocument8 pagesChapter 2 (Electrostatic Potential and Capacitance) UnsolvedMahendra ShahNo ratings yet
- Physics 170 - Mechanics: Gravitational EnergyDocument18 pagesPhysics 170 - Mechanics: Gravitational EnergyAbdulHafizK.No ratings yet
- Microsemi Make Linear Mode WorkDocument6 pagesMicrosemi Make Linear Mode WorkrauolNo ratings yet
- Craig Goodwin HV Diagnostics Inc: Name: Company NameDocument38 pagesCraig Goodwin HV Diagnostics Inc: Name: Company NametalibanindonesiaNo ratings yet
- Soft StarterDocument13 pagesSoft StarterThanigai VelNo ratings yet
- Doan 2014Document7 pagesDoan 2014Matheus dos Reis BravimNo ratings yet
- Commissioning Manual - FinalDocument161 pagesCommissioning Manual - FinalRagab Tolba100% (1)
- Project 1 (Physics)Document8 pagesProject 1 (Physics)Sachidanand Singh100% (1)
- ABB Component Drives: ACS150, 0.37 To 4 KW / 0.5 To 5 HP Technical CatalogueDocument8 pagesABB Component Drives: ACS150, 0.37 To 4 KW / 0.5 To 5 HP Technical CatalogueMithun KumarNo ratings yet
- Chapter 1 Periodical Motion (Update 27-10-2020)Document27 pagesChapter 1 Periodical Motion (Update 27-10-2020)Kim Yuan TanNo ratings yet
- Rectilinear MotionDocument4 pagesRectilinear MotionS KumarNo ratings yet
- 101 ExercisesDocument94 pages101 ExercisesMichael A. Alonso RodriguezNo ratings yet
- DIPPRDocument8 pagesDIPPROmar AlmonteNo ratings yet
- Grid Interconnection of Embedded Generators Not For BiddingDocument31 pagesGrid Interconnection of Embedded Generators Not For BiddingkrcdewanewNo ratings yet
- AC 24 V / DC 13.5 33 V QBM3120-..: DC 8... 33 V QBM3020-..: DC 0... 10 V QBM3120-..: 4 20 MaDocument10 pagesAC 24 V / DC 13.5 33 V QBM3120-..: DC 8... 33 V QBM3020-..: DC 0... 10 V QBM3120-..: 4 20 MaMohamed AmjathNo ratings yet
- Ansys Fluent Simulation Report SideDocument7 pagesAnsys Fluent Simulation Report SideA-31 Abhinav VermaNo ratings yet
- McQuay MDB-ER Technical Manual Eng PDFDocument136 pagesMcQuay MDB-ER Technical Manual Eng PDFTaufik 'opics' AkbarNo ratings yet
- Log TableDocument61 pagesLog Tablemalti jNo ratings yet
- Double Conversion TableDocument12 pagesDouble Conversion TableUwa SonNo ratings yet
- ZVS Full Bridge Switching-Vishay PDFDocument6 pagesZVS Full Bridge Switching-Vishay PDFCataNo ratings yet
- NGR Sizing For ArarDocument6 pagesNGR Sizing For Ararsrigirisetty208No ratings yet