Download as pdf or txt
You might also like
- Linear Algebra PDFDocument99 pagesLinear Algebra PDFshankar khanalNo ratings yet
- Engineering Mechanics Vectors and ScalarsDocument42 pagesEngineering Mechanics Vectors and ScalarssatwantNo ratings yet
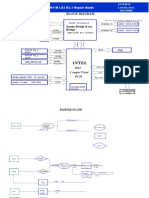
- Block Diagram: P8H61-M LX3 R2.1 Repair GuideDocument6 pagesBlock Diagram: P8H61-M LX3 R2.1 Repair GuideAdi copycenterNo ratings yet
- Vectors and Vector Spaces: Prof. Dr. Hani Mahdi Computer and System Engineering DepartmentDocument73 pagesVectors and Vector Spaces: Prof. Dr. Hani Mahdi Computer and System Engineering DepartmentAhmed AdelNo ratings yet
- Vector Algebra and Calculus: Stephen RobertsDocument36 pagesVector Algebra and Calculus: Stephen RobertsRoselle AnireNo ratings yet
- ch03 - Part2 - RealVector v2 (42) - DONEDocument42 pagesch03 - Part2 - RealVector v2 (42) - DONEHsinminNo ratings yet
- Ch03 - Part3 - RealVector v2 (40) - DoneDocument39 pagesCh03 - Part3 - RealVector v2 (40) - DoneHsinminNo ratings yet
- Vector Spaces Linear Independence, Bases and DimensionDocument49 pagesVector Spaces Linear Independence, Bases and Dimensionvahid mesicNo ratings yet
- 2-Geom 0Document5 pages2-Geom 0CSP EDUNo ratings yet
- L-02 Lines.6 PDFDocument9 pagesL-02 Lines.6 PDFnootiNo ratings yet
- MathsDocument33 pagesMathsHoudaNo ratings yet
- Square Root of A Function: Focus On - .Document12 pagesSquare Root of A Function: Focus On - .Catalin BlesnocNo ratings yet
- To Provide Background Material in Support of Topics in DigitalDocument32 pagesTo Provide Background Material in Support of Topics in DigitalShivaNo ratings yet
- Chapt 3-VectorsDocument25 pagesChapt 3-VectorsAbdullatif AlbattatNo ratings yet
- Ya Ya Y: 2 1 XX CenterDocument10 pagesYa Ya Y: 2 1 XX Centerapi-630992605No ratings yet
- Unit 1 VectorsDocument40 pagesUnit 1 VectorsVimala ElumalaiNo ratings yet
- Calc2 6a Vectors and 3d Geometry PDFDocument7 pagesCalc2 6a Vectors and 3d Geometry PDFAnkit RoyNo ratings yet
- Anin Mimos MathDocument24 pagesAnin Mimos MathAtul NipaneNo ratings yet
- Física Basica I Class 2: Coordinate Systems Scalars & VectoresDocument36 pagesFísica Basica I Class 2: Coordinate Systems Scalars & VectoresRafael Esteban Barbosa MahechaNo ratings yet
- QAB SSN 2 Vector1 For StudentsDocument32 pagesQAB SSN 2 Vector1 For Studentslyw3178No ratings yet
- Mobile Robotics Lecture No. 2Document61 pagesMobile Robotics Lecture No. 2ZaidKhanNo ratings yet
- l19 Triangle Law of Addition of Two Vectors 2Document25 pagesl19 Triangle Law of Addition of Two Vectors 2devendra singhNo ratings yet
- CHAPTER 1: Mathematical Physics: ContainsDocument29 pagesCHAPTER 1: Mathematical Physics: ContainsMukit Hasan JimNo ratings yet
- Chap 1Document101 pagesChap 1Breezy Buzy OnNo ratings yet
- Geom2d PDFDocument13 pagesGeom2d PDFstalin1227No ratings yet
- C3 Revision SheetDocument1 pageC3 Revision SheetNifraNiyasNo ratings yet
- Graphs and Transformations: Twitter: @owen134866Document48 pagesGraphs and Transformations: Twitter: @owen134866CubeNo ratings yet
- Linear Algebra ReviewDocument42 pagesLinear Algebra ReviewCHWNo ratings yet
- Vector Stokes TheoramDocument26 pagesVector Stokes TheoramjhffklNo ratings yet
- Linear Algebra VectorSpacesDocument38 pagesLinear Algebra VectorSpacesno nameNo ratings yet
- Vector Geometry AnnotatedDocument93 pagesVector Geometry Annotatedkentoks 69No ratings yet
- Line Drawing: OutlineDocument9 pagesLine Drawing: OutlineAyushi ChaplotNo ratings yet
- PcaDocument73 pagesPca1balamanianNo ratings yet
- 24 VisualizationDocument56 pages24 VisualizationganeshNo ratings yet
- Measurement and Vectors: Key Concepts, Equations, and Problem Solving StrategiesDocument6 pagesMeasurement and Vectors: Key Concepts, Equations, and Problem Solving StrategiesKim SeungminNo ratings yet
- Calculus Stewart 7th Edition Solutions ManualDocument45 pagesCalculus Stewart 7th Edition Solutions ManualCindyCurrydwqzr100% (80)
- What Is The Main Problem in Control?: Chapter 1 Overview of Control EngineeringDocument82 pagesWhat Is The Main Problem in Control?: Chapter 1 Overview of Control EngineeringTu vu van100% (1)
- Fdocuments - in - Introduction To Tensors Max Planck Why Tensors A Tensors Can Be Used When MatricesDocument35 pagesFdocuments - in - Introduction To Tensors Max Planck Why Tensors A Tensors Can Be Used When Matricesmanjunath RamachandraNo ratings yet
- 29 2 SFC N Vol IntsDocument21 pages29 2 SFC N Vol Intstarek moahmoud khalifaNo ratings yet
- Electricidad y MagnetismoDocument4 pagesElectricidad y Magnetismojose2017No ratings yet
- EEE23 Lecture 01 - Vector Analysis PDFDocument51 pagesEEE23 Lecture 01 - Vector Analysis PDFJose Paolo AgustinNo ratings yet
- Lecture 4-Module 1-Vectors-Ave1Document26 pagesLecture 4-Module 1-Vectors-Ave1simardhanda1No ratings yet
- Imaging GeometryDocument34 pagesImaging GeometryDeepa NairNo ratings yet
- 02 IRQ Mathematical FoundationDocument50 pages02 IRQ Mathematical FoundationSahan NishshankaNo ratings yet
- S01C01 - 1.3 FunLineal - FunCuadraticaDocument22 pagesS01C01 - 1.3 FunLineal - FunCuadraticaJose SolerNo ratings yet
- Vector Notes (Year 1)Document23 pagesVector Notes (Year 1)alicia.milligan1107No ratings yet
- Multivariable Study Guide 2017Document21 pagesMultivariable Study Guide 2017kiwiedonNo ratings yet
- Block 1Document18 pagesBlock 1muay88No ratings yet
- Support Vector Machines: Xiaojin ZhuDocument41 pagesSupport Vector Machines: Xiaojin ZhugunnersregisterNo ratings yet
- Lecture 2 Review Linear Algebra For ORDocument43 pagesLecture 2 Review Linear Algebra For ORsharef albarak100% (1)
- Chapter 6 VectorDocument14 pagesChapter 6 VectorEmir Emir SyaminNo ratings yet
- Y F (X) y G (X) X A: Calculus II MAT 146 Integration Applications: Area Between CurvesDocument6 pagesY F (X) y G (X) X A: Calculus II MAT 146 Integration Applications: Area Between CurvesJess PeraltaNo ratings yet
- Vector Space PresentationDocument26 pagesVector Space Presentationmohibrajput230% (1)
- VC-1 Vector Algebra and CalculusDocument28 pagesVC-1 Vector Algebra and CalculuseltyphysicsNo ratings yet
- VC.01 Vectors Point The Way LiteracyDocument7 pagesVC.01 Vectors Point The Way LiteracySri RaghavanNo ratings yet
- MATLAB Linear AlgebraDocument39 pagesMATLAB Linear AlgebraRaine OrtegaNo ratings yet
- 01 Quadratic Functions (Edited 1.0)Document89 pages01 Quadratic Functions (Edited 1.0)Shelly ChanNo ratings yet
- Lecture 2: Background: - Linear AlgebraDocument36 pagesLecture 2: Background: - Linear AlgebraSana SaadNo ratings yet
- 11 - Vector SpaceDocument21 pages11 - Vector SpaceWinnie LamNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Starting Instruction of PMM With Triol AK06 VSD With UMKA03 ControllerDocument27 pagesStarting Instruction of PMM With Triol AK06 VSD With UMKA03 ControllerberhelisNo ratings yet
- 2018-2 TechPresentation BallDocument52 pages2018-2 TechPresentation BallAmar SheteNo ratings yet
- Deutsch-Jozsa Algorithm As A Test of Quantum Computation: David Collins, K. W. Kim and W. C. HoltonDocument10 pagesDeutsch-Jozsa Algorithm As A Test of Quantum Computation: David Collins, K. W. Kim and W. C. HoltonJullyano LinoNo ratings yet
- Cambridge International AS & A Level: Physics 9702/42 February/March 2022Document17 pagesCambridge International AS & A Level: Physics 9702/42 February/March 2022Pom GNo ratings yet
- L Shape Analysis PDFDocument9 pagesL Shape Analysis PDFJinesh PatelNo ratings yet
- Performance - Ojo - of A Stationary Savonius Rotor With Circular ArcDocument5 pagesPerformance - Ojo - of A Stationary Savonius Rotor With Circular Arcgustavo rodriguezNo ratings yet
- Hook Bounce ProblemDocument48 pagesHook Bounce ProblemAlexNo ratings yet
- C Module-5 Reciprocating Air Compressors. Reciprocating Compressors - Construction - WorkingDocument48 pagesC Module-5 Reciprocating Air Compressors. Reciprocating Compressors - Construction - WorkingJasraj Gill100% (1)
- Exact Differential EquationsDocument5 pagesExact Differential EquationsDeomasis Patria Vi NarcisoNo ratings yet
- SunscreenDocument44 pagesSunscreenArtyom FreemanNo ratings yet
- Shallow Foundations - SettlementDocument24 pagesShallow Foundations - SettlementMUHAMMAD BILAL AHMADNo ratings yet
- BG Barrier Gate User Instruction 20191104Document21 pagesBG Barrier Gate User Instruction 20191104Sigit TarioNo ratings yet
- Mason Seismic Restraint Guidelines PDFDocument234 pagesMason Seismic Restraint Guidelines PDFsunmechanical100% (1)
- Pile Analysis (As2159) in Accordance With Australian Standard: Piling-Design and Installation Per AS 2159-2009Document3 pagesPile Analysis (As2159) in Accordance With Australian Standard: Piling-Design and Installation Per AS 2159-2009PhranckNo ratings yet
- 0) Administrative Affairs: Instructor: Sebastian Wüster, IISER Bhopal, 2018Document9 pages0) Administrative Affairs: Instructor: Sebastian Wüster, IISER Bhopal, 2018Hussain Mahammad Habib 19142No ratings yet
- Elastic Potential Energy: English For PhysicsDocument2 pagesElastic Potential Energy: English For Physicshaura 30anNo ratings yet
- The Rankine Cycle: Ideal Cycle Problems To SolveDocument12 pagesThe Rankine Cycle: Ideal Cycle Problems To Solveأحمد صلاح الدينNo ratings yet
- LSBLG MCF SeriesDocument116 pagesLSBLG MCF Serieshasbullah mariahNo ratings yet
- DatasheetDocument6 pagesDatasheetratnaNo ratings yet
- Theory of Crystallization PDFDocument26 pagesTheory of Crystallization PDFAtik Faysal Ayon50% (2)
- Instrumentation Cables: Product CatalogueDocument44 pagesInstrumentation Cables: Product Cataloguexinying liuNo ratings yet
- R07a1ec02-Electrical Circuit AnalysisDocument8 pagesR07a1ec02-Electrical Circuit AnalysisSRINIVASA RAO GANTANo ratings yet
- Chapter #6: Bipolar Junction: TransistorsDocument61 pagesChapter #6: Bipolar Junction: TransistorsXolelwa GaselaNo ratings yet
- PARTS LITS Air Cooled Packaged Water ChillersDocument11 pagesPARTS LITS Air Cooled Packaged Water ChillersOng MatNo ratings yet
- Geotechnical InvestigationsDocument85 pagesGeotechnical InvestigationsAmpumuza MmukundaNo ratings yet
- Digital Microwave Communication PrinciplesDocument113 pagesDigital Microwave Communication PrinciplesMohamed Maged ElgisrNo ratings yet
- BS - 5756-2007 Clasificación de La Fuerza Visual de La Madera Blanda - BRITISHDocument20 pagesBS - 5756-2007 Clasificación de La Fuerza Visual de La Madera Blanda - BRITISHKenneth Ayala CastroNo ratings yet
- (1 Mark) : This Document Is Licensed To Bolton Muslim Girls School - MB121436Document11 pages(1 Mark) : This Document Is Licensed To Bolton Muslim Girls School - MB121436Haleemah50% (2)
- Week 1Document12 pagesWeek 1shmyeNo ratings yet