Download as docx, pdf, or txt
You might also like
- Read The Text About Automation and Match With Their DefinitionDocument2 pagesRead The Text About Automation and Match With Their DefinitionDiego SantacruzNo ratings yet
- Good News - News Stories For Listening and Discussion - Student Book - OUPDocument82 pagesGood News - News Stories For Listening and Discussion - Student Book - OUPMahmut Hudai Turgut80% (10)
- Proposal of Robot ThesisDocument15 pagesProposal of Robot ThesisHus Forth CorrentyNo ratings yet
- Q3e RW Placement Test A TeacherDocument7 pagesQ3e RW Placement Test A TeacherLevent DemirelNo ratings yet
- Thesis ProjectDocument23 pagesThesis Projecteyoule abdiNo ratings yet
- Design and Construction of A Robotic Arm For Industrial Automation IJERTV6IS050539Document5 pagesDesign and Construction of A Robotic Arm For Industrial Automation IJERTV6IS050539Narayan ManeNo ratings yet
- PCB DrillingDocument7 pagesPCB Drillingalfonso alvarez garmaNo ratings yet
- Omni - Arm Final 2 4Document25 pagesOmni - Arm Final 2 4GHIENRY CUTOPNo ratings yet
- Trajectory Planningof 6 DOFArticulated Robotic ArmDocument9 pagesTrajectory Planningof 6 DOFArticulated Robotic ArmMohamed ReGaiegNo ratings yet
- Futech2024 03 01 03 +princewillDocument7 pagesFutech2024 03 01 03 +princewillNIKHIL ASNo ratings yet
- Collision Free Motion Planning For Robots by Capturing The EnvironmentDocument7 pagesCollision Free Motion Planning For Robots by Capturing The EnvironmentQaiser KhanNo ratings yet
- Research PaperDocument11 pagesResearch PaperIshan BhargaveNo ratings yet
- Synosis Print ReportDocument6 pagesSynosis Print ReportNIKHIL ASNo ratings yet
- Design and Analysis of An Articulated Robot ArmDocument8 pagesDesign and Analysis of An Articulated Robot ArmSamuel AbraghamNo ratings yet
- MIS HW05 CH11 Will Robots Replace People in ManufacturingDocument2 pagesMIS HW05 CH11 Will Robots Replace People in ManufacturingKappa RossNo ratings yet
- Ros Integrated Api2Document7 pagesRos Integrated Api2Samuel Garcia CerdaNo ratings yet
- Module 1: Introduction To Robotics Lecture 1: AutomationDocument2 pagesModule 1: Introduction To Robotics Lecture 1: AutomationManoj MTNo ratings yet
- TPW Batch8Document5 pagesTPW Batch8Sourasish TalukderNo ratings yet
- RIA Collaborative Robots White Paper October 2014Document13 pagesRIA Collaborative Robots White Paper October 2014solomonlazioNo ratings yet
- Study About Machining With Industrial Robots Help: January 2008Document7 pagesStudy About Machining With Industrial Robots Help: January 2008oumayma saoudiNo ratings yet
- Acadia17 660Document10 pagesAcadia17 660Jianjia ZhouNo ratings yet
- Literature Reviewon Designand Simulationof Industrial Robotic Armusing CADCAMSoftwareDocument4 pagesLiterature Reviewon Designand Simulationof Industrial Robotic Armusing CADCAMSoftwareSamuel AbraghamNo ratings yet
- Lecture 1 PDFDocument2 pagesLecture 1 PDFKarthikNo ratings yet
- Industrial RobotsDocument32 pagesIndustrial Robotsclaudiu feier50% (2)
- Arba Minch University College of Business and Economics Program of MBADocument8 pagesArba Minch University College of Business and Economics Program of MBAMahedre ZenebeNo ratings yet
- The Different Applications of The Factory Robot ArmDocument10 pagesThe Different Applications of The Factory Robot ArmjackNo ratings yet
- Design and Development of Robotic With 4-Degree of Freedom: Imayam College of EngineeringDocument14 pagesDesign and Development of Robotic With 4-Degree of Freedom: Imayam College of EngineeringvinothkumarNo ratings yet
- A Critical View On PLM Alm Convergence in Practice and ResearchDocument8 pagesA Critical View On PLM Alm Convergence in Practice and ResearchSenad BalicNo ratings yet
- Simulation of Pick and Place Robotics System Using Solidworks SoftmotionDocument7 pagesSimulation of Pick and Place Robotics System Using Solidworks SoftmotionSaumya SaxenaNo ratings yet
- Industrial RoboticsDocument25 pagesIndustrial RoboticsRajat NishadNo ratings yet
- R202042D Project Proposal 4.1 B CHIMUSODocument9 pagesR202042D Project Proposal 4.1 B CHIMUSOnyashaNo ratings yet
- Roots of Robotics TechnologyDocument5 pagesRoots of Robotics Technologystarvz95No ratings yet
- Lab Part 03 Homework 01Document12 pagesLab Part 03 Homework 01ឆាម វ៉ាន់នូវNo ratings yet
- A Survey of Virtual Prototyping Techniques For Mechanical Product DevelopmentDocument20 pagesA Survey of Virtual Prototyping Techniques For Mechanical Product DevelopmentVaibahv chavanNo ratings yet
- Development of SCARA Robots: Kazuo YamafujiDocument6 pagesDevelopment of SCARA Robots: Kazuo YamafujiMinh Hoang TranNo ratings yet
- Different Levels of Complexity in Tasks For Robots: Technology Industrial Automation Industrial Robots ManufacturingDocument11 pagesDifferent Levels of Complexity in Tasks For Robots: Technology Industrial Automation Industrial Robots ManufacturingarunimajoyNo ratings yet
- ESME Tadele B. Tuli and Tesfaye O. TerefeDocument9 pagesESME Tadele B. Tuli and Tesfaye O. TerefeTesfayeNo ratings yet
- 5827-Article Text-12774-2-10-20150716 PDFDocument5 pages5827-Article Text-12774-2-10-20150716 PDFjoebrislinNo ratings yet
- PptPick & Place RobotDocument14 pagesPptPick & Place RobotAkshay byp100% (1)
- Collaborative Robotics End User ApplicationsDocument23 pagesCollaborative Robotics End User ApplicationsMorteza Dianatfar100% (1)
- Robotized Assembly Process Using Dual Arm RobotDocument6 pagesRobotized Assembly Process Using Dual Arm RobotshitalchiddarwarNo ratings yet
- ifm2019TheDigitalThreadinIndustry40 PDFDocument22 pagesifm2019TheDigitalThreadinIndustry40 PDFsivaa hzNo ratings yet
- A Low-Cost Build-Your-Own Three Axis CNC Mill Prototype: Sundar Pandian and S. Raj PandianDocument6 pagesA Low-Cost Build-Your-Own Three Axis CNC Mill Prototype: Sundar Pandian and S. Raj Pandianandri enggopNo ratings yet
- Contents Multipurpose Robot - 102321Document51 pagesContents Multipurpose Robot - 102321Veer More OfficialNo ratings yet
- Final Report Anthropomorphic Robot (RRR) : Universidad Autónoma de San Luis PotosíDocument33 pagesFinal Report Anthropomorphic Robot (RRR) : Universidad Autónoma de San Luis PotosíCiro Soto GarciaNo ratings yet
- The Role of Mechatronics Engineering in RoboticDocument5 pagesThe Role of Mechatronics Engineering in Roboticdebug thugsNo ratings yet
- DT Human-Robot Collaborative AssemblyDocument4 pagesDT Human-Robot Collaborative AssemblyROBOTLAB ChannelNo ratings yet
- Motor-Less and Gear-Less Robots: New Technologies For Service and Personal RobotsDocument8 pagesMotor-Less and Gear-Less Robots: New Technologies For Service and Personal RobotsANo ratings yet
- PickingDK A Framework For Industrial Bin-Picking ADocument18 pagesPickingDK A Framework For Industrial Bin-Picking AROBOTLAB ChannelNo ratings yet
- Antra: Haping He UtureDocument21 pagesAntra: Haping He UtureAliasKevin KunjuNo ratings yet
- Research Title: Robotic Arms Help Companies Improve TheirDocument2 pagesResearch Title: Robotic Arms Help Companies Improve TheiramnaNo ratings yet
- ERSP: A Software Platform and Architecture For The Service Robotics IndustryDocument8 pagesERSP: A Software Platform and Architecture For The Service Robotics IndustryruyamNo ratings yet
- Authors' ProfilesDocument378 pagesAuthors' ProfilesHabib MasumNo ratings yet
- The Virtual Manufacturing ConceptDocument11 pagesThe Virtual Manufacturing ConceptAbid YusufNo ratings yet
- Simul 2018 1 10 50014Document5 pagesSimul 2018 1 10 50014Hajar BnouachirNo ratings yet
- Robotic Arm Proposal ... : Uploaded: 2 May 2024 at 11:37 Am Plagiarism: % Words: 570Document2 pagesRobotic Arm Proposal ... : Uploaded: 2 May 2024 at 11:37 Am Plagiarism: % Words: 570Davis TwinobusingyeNo ratings yet
- Design and Development of Pick and Place Arm Robot: September 2020Document8 pagesDesign and Development of Pick and Place Arm Robot: September 2020Evelyn CarrilloNo ratings yet
- Draft Towards Remote Teleoperation of A Mobile Manipulator System in Machine Loading and Unloading TasksDocument13 pagesDraft Towards Remote Teleoperation of A Mobile Manipulator System in Machine Loading and Unloading Tasksعلي ايادNo ratings yet
- CobotsDocument10 pagesCobotsNour BouzayenNo ratings yet
- What Is A SCARA RobotDocument6 pagesWhat Is A SCARA RobotDeependra TalandiNo ratings yet
- Pipelined Processor Farms: Structured Design for Embedded Parallel SystemsFrom EverandPipelined Processor Farms: Structured Design for Embedded Parallel SystemsNo ratings yet
- Practical, Made Easy Guide To Robotics & Automation [Revised Edition]From EverandPractical, Made Easy Guide To Robotics & Automation [Revised Edition]Rating: 1 out of 5 stars1/5 (1)
- Ra 8551 Chapter 1Document11 pagesRa 8551 Chapter 1Jayson ampatuanNo ratings yet
- Applied Networking Labs 2nd Edition Boyle Solutions ManualDocument19 pagesApplied Networking Labs 2nd Edition Boyle Solutions ManualDavidBrownjrzf100% (61)
- Pismene EngleskiDocument6 pagesPismene EngleskiShady SuljagicNo ratings yet
- PXELINUX and WDS (The Proper WAY) - Syslinux - UsersDocument4 pagesPXELINUX and WDS (The Proper WAY) - Syslinux - UsersSven ReckenthälerNo ratings yet
- Transfer StationsDocument21 pagesTransfer StationsLalit ThakurCE1031No ratings yet
- Shangrila - Grease TrapDocument2 pagesShangrila - Grease TrapJanpull SugasteNo ratings yet
- Lube & Grease PlantDocument144 pagesLube & Grease PlantYani EsbeNo ratings yet
- Lesson 2 - Soil Formation ADocument6 pagesLesson 2 - Soil Formation AJessie Jade Sestina Duroja - MainNo ratings yet
- Entrepreneurship AssignmentDocument9 pagesEntrepreneurship AssignmentZubair A Khan75% (4)
- OCR 104A: Application For Mediation or Hearing - Form ADocument4 pagesOCR 104A: Application For Mediation or Hearing - Form AjohnNo ratings yet
- Use of Bamboo As Housing Material and in Making Various ProductsDocument69 pagesUse of Bamboo As Housing Material and in Making Various ProductsRAHUL100% (2)
- Corporate Policy & Strategy: Dr. Nguyễn Gia NinhDocument37 pagesCorporate Policy & Strategy: Dr. Nguyễn Gia NinhSơn VũNo ratings yet
- Configure SFTP Shell Script File TransferDocument14 pagesConfigure SFTP Shell Script File Transferwbwfalwcbggsr logicstreakNo ratings yet
- Scope of WorkDocument2 pagesScope of WorkAzril AzmiNo ratings yet
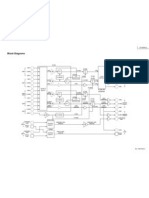
- Block DiagramsDocument11 pagesBlock DiagramsalbertlongNo ratings yet
- 1619 Discretionary Bursary Award LetterDocument3 pages1619 Discretionary Bursary Award LetterMaria Guerrero troncosoNo ratings yet
- AE 101 M10 - Farm Power and MachineryDocument35 pagesAE 101 M10 - Farm Power and Machinerygregorio roaNo ratings yet
- Money PadDocument33 pagesMoney Padlovedon258369100% (1)
- Guide To The Selection of Jointing Methods For Polyethylene Pressure Pipes 1Document10 pagesGuide To The Selection of Jointing Methods For Polyethylene Pressure Pipes 1kevinkurnia528No ratings yet
- Dip LabDocument5 pagesDip LabAmber SarwarNo ratings yet
- The Impact of Inequality To Governance and Politics in The PhilippinesDocument14 pagesThe Impact of Inequality To Governance and Politics in The PhilippinesElson Ballena RelentlessTriathleteNo ratings yet
- E1224b PDFDocument3 pagesE1224b PDFMai Thế ToanNo ratings yet
- Magnetic Library For ModelicaDocument8 pagesMagnetic Library For ModelicaGthulasi78No ratings yet
- Djonn 5 Dkspnays 1 RCMLLDocument81 pagesDjonn 5 Dkspnays 1 RCMLLOmar HishamNo ratings yet
- OECD Comparison of Technology TransferDocument32 pagesOECD Comparison of Technology Transfercdh1001No ratings yet
- Silver Matrix Answer To Righthaven Copyright Infringement LawsuitDocument12 pagesSilver Matrix Answer To Righthaven Copyright Infringement Lawsuitwww.righthavenlawsuits.comNo ratings yet
- User Manual Abrites Commander For OpelDocument18 pagesUser Manual Abrites Commander For OpelmanutecNo ratings yet
- 1083ch8 2 PDFDocument19 pages1083ch8 2 PDFMateusz SynowieckiNo ratings yet





























































![Practical, Made Easy Guide To Robotics & Automation [Revised Edition]](https://imgv2-1-f.scribdassets.com/img/word_document/253466853/149x198/4281882d40/1709916831?v=1)