Download as pdf or txt
You might also like
- Impa 5th EditionDocument1,547 pagesImpa 5th EditionGaurav Maithil100% (5)
- Tajima TMFD-G920 PDFDocument73 pagesTajima TMFD-G920 PDFСанек АбверNo ratings yet
- Vibration Analysis Handbook - James TaylorDocument345 pagesVibration Analysis Handbook - James Taylormmbataineh91% (33)
- PDF 03 72le ManualDocument134 pagesPDF 03 72le ManualTrần Quế ThiênNo ratings yet
- Commercial Note PDFDocument17 pagesCommercial Note PDFNguyễn Trần NamNo ratings yet
- 2 Caterpillar Drive Chain PDFDocument1 page2 Caterpillar Drive Chain PDFwaseemNo ratings yet
- Steam Turbine Generator Fundamentals - HPC Tech ServicesDocument202 pagesSteam Turbine Generator Fundamentals - HPC Tech Servicesshaner64100% (9)
- BOP Test Procedure - Drilling - Mud Docs & JobsDocument7 pagesBOP Test Procedure - Drilling - Mud Docs & Jobskrishnsgk100% (2)
- Kobelco CKE1800 ManualDocument4 pagesKobelco CKE1800 Manualgraig2750% (2)
- MCL322Document100 pagesMCL322Diptanshu RajanNo ratings yet
- 510B Backhoe Loader: Engine PerformanceDocument5 pages510B Backhoe Loader: Engine PerformancebalajimetturNo ratings yet
- Engine Mechanical Part1 (To p44)Document1 pageEngine Mechanical Part1 (To p44)budi dNo ratings yet
- Involute Spline Shafts & Bushings: FeaturesDocument4 pagesInvolute Spline Shafts & Bushings: FeaturesSunilNo ratings yet
- Engine Mechanical Hal 6Document1 pageEngine Mechanical Hal 6budi dNo ratings yet
- Mom p1&p2Document9 pagesMom p1&p2187Ranjan KumarNo ratings yet
- Td45 DryerDocument15 pagesTd45 DryerKyle McdonaldNo ratings yet
- Turning Gear-katalog-3-530-K5-02Document13 pagesTurning Gear-katalog-3-530-K5-02Leonid KolesnikovNo ratings yet
- IMG - 0034 PSME Code 2008 23Document1 pageIMG - 0034 PSME Code 2008 23Hnqr584hNo ratings yet
- Physics Lab 8Document6 pagesPhysics Lab 8Muhammad ShaikhNo ratings yet
- Forces and Movements in Roller Bearings: Structure-Borne SoundDocument16 pagesForces and Movements in Roller Bearings: Structure-Borne SoundPeak NeoNo ratings yet
- Is The Time Constant of G: T T P P P T RDocument5 pagesIs The Time Constant of G: T T P P P T Romer1299No ratings yet
- SM 4 PDFDocument117 pagesSM 4 PDFRoberto Lara MartínezNo ratings yet
- Nischay MDocument13 pagesNischay MvaibhavNo ratings yet
- Enerpac PTW Series Pneumatic Torque WrenchesDocument3 pagesEnerpac PTW Series Pneumatic Torque Wrenchesshahnaz.nur25No ratings yet
- Characteristics of World HS Rolling Stock 01.11.2013Document5 pagesCharacteristics of World HS Rolling Stock 01.11.2013Abhishek MathurNo ratings yet
- Tender No:-60102 Tender Reference No: - CMM/MEQ/10-76-2-1180 Template Name: - E-B 6: Detailed Price Schedule of Quantities and Rates For Mandatory/Essential Spares For GHAVP-1&2 ProjectDocument5 pagesTender No:-60102 Tender Reference No: - CMM/MEQ/10-76-2-1180 Template Name: - E-B 6: Detailed Price Schedule of Quantities and Rates For Mandatory/Essential Spares For GHAVP-1&2 Projectmakrand87No ratings yet
- Sany SCC 1500cDocument21 pagesSany SCC 1500cYashwant R KamathNo ratings yet
- ROTARY - Vibration Report - 1223 - 12-2018 PDFDocument7 pagesROTARY - Vibration Report - 1223 - 12-2018 PDFWe learnNo ratings yet
- 650tlx Stage3b PRDocument6 pages650tlx Stage3b PRДмитрий БакайNo ratings yet
- Velocity: F AngularDocument4 pagesVelocity: F AngularCHIU KEUNG OFFICIAL PRONo ratings yet
- ITI - Sim: SimulationDocument13 pagesITI - Sim: SimulationhaggNo ratings yet
- Modeling and Simulation of A Traction Control Algorithm For An Electric Vehicle With Four Separate Wheel DrivesDocument5 pagesModeling and Simulation of A Traction Control Algorithm For An Electric Vehicle With Four Separate Wheel Drivesricmf89No ratings yet
- Jd570-A Motorgrader: Engine Performance Add Versatility WithDocument3 pagesJd570-A Motorgrader: Engine Performance Add Versatility WithTamquadistu AlexNo ratings yet
- 570a PDFDocument3 pages570a PDFTamquadistu AlexNo ratings yet
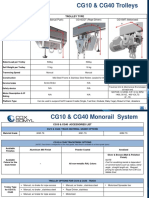
- Trolley Type: (CG10MPT (Manual Push) CG10CDT (Rope Driven) CG10MT (Motorized)Document3 pagesTrolley Type: (CG10MPT (Manual Push) CG10CDT (Rope Driven) CG10MT (Motorized)Francis BautistaNo ratings yet
- Fluid Machines (EG 616 ME) : Ram C. PoudelDocument15 pagesFluid Machines (EG 616 ME) : Ram C. PoudelCrazy HostelersNo ratings yet
- BQ - Exel Mandiri TechnicalDocument4 pagesBQ - Exel Mandiri Technicalsamuel ade putraNo ratings yet
- KD List AIRIS II-2Document5 pagesKD List AIRIS II-2Rafael Ortega - meajudarafaNo ratings yet
- 2019ee30598 Exp 5Document6 pages2019ee30598 Exp 5Prashant KumarNo ratings yet
- Reliability and Theory of Helical Pile SizingDocument15 pagesReliability and Theory of Helical Pile SizingSana Ullah HashemiNo ratings yet
- Sem 655Document6 pagesSem 655rizalcorp97No ratings yet
- ST AccDocument16 pagesST Acckiwi_qnNo ratings yet
- 2 Caterpillar Drive ChainDocument1 page2 Caterpillar Drive ChainFernando Mendoza0% (1)
- Manual MotoreZzzDocument10 pagesManual MotoreZzzNicolas CarvajalNo ratings yet
- Zoomlion Rough Terrain Cranes Spec 6f2538 PDFDocument6 pagesZoomlion Rough Terrain Cranes Spec 6f2538 PDFAlfian Lukas ArdiansyahNo ratings yet
- EV Series: Instruction ManualDocument1 pageEV Series: Instruction ManualCarlos RasconNo ratings yet
- Chile GT46AC Continuous TE RatingDocument1 pageChile GT46AC Continuous TE RatingRafael Dutil LucianaNo ratings yet
- Motor Load: 2 Formulas and EquationsDocument5 pagesMotor Load: 2 Formulas and EquationsHOANJO1983No ratings yet
- Diamond Interchange: Important Year's of Highway DevelopmentDocument2 pagesDiamond Interchange: Important Year's of Highway DevelopmentRam TqrNo ratings yet
- BBS Approved Girder 563+160Document5 pagesBBS Approved Girder 563+160Anubhav TiwariNo ratings yet
- C 180 Float SupplementDocument26 pagesC 180 Float SupplementFlorian SterchiNo ratings yet
- How To Size A Gearmotor 2170 - DN - ParvaluxDocument2 pagesHow To Size A Gearmotor 2170 - DN - ParvaluxAlexis A. Illarramendi G.No ratings yet
- Dynapac CP275 - CompressedDocument4 pagesDynapac CP275 - CompressedMamankz TheaNo ratings yet
- Cilindro Compacto SMC (CQM)Document15 pagesCilindro Compacto SMC (CQM)Tiago RezendeNo ratings yet
- J519 BCM PinoutsDocument6 pagesJ519 BCM PinoutssaniNo ratings yet
- NR'S MVDC Solution: 10Kv Jiangdong MVDC For Optimizing Distribution NetworkDocument2 pagesNR'S MVDC Solution: 10Kv Jiangdong MVDC For Optimizing Distribution NetworkMoshNo ratings yet
- D C A B: Installation Electronic Vessel Control D4, D6 EVC - CDocument2 pagesD C A B: Installation Electronic Vessel Control D4, D6 EVC - Csivan_sg1800No ratings yet
- EFR 6258-G EFR 6258-A: 225-450 HP Turbo 225-450 HP TurboDocument1 pageEFR 6258-G EFR 6258-A: 225-450 HP Turbo 225-450 HP TurboElias SallanmaaNo ratings yet
- Tender No:-60102 Tender Reference No: - CMM/MEQ/10-76-2-1180 Template Name: - E-B 1: Detailed Price Schedule of Quantities and Rates For Mandatory/Essential Spares For GHAVP-1&2 ProjectDocument5 pagesTender No:-60102 Tender Reference No: - CMM/MEQ/10-76-2-1180 Template Name: - E-B 1: Detailed Price Schedule of Quantities and Rates For Mandatory/Essential Spares For GHAVP-1&2 Projectmakrand87No ratings yet
- Gearsand GearingDocument57 pagesGearsand Gearingcamohunter71No ratings yet
- Ilovepdf MergedDocument80 pagesIlovepdf MergedAlicann CannNo ratings yet
- Ali Can StajDocument1 pageAli Can StajAlicann CannNo ratings yet
- Session 8 (2) - MergedDocument85 pagesSession 8 (2) - MergedAlicann CannNo ratings yet
- Session 11 (1) - MergedDocument43 pagesSession 11 (1) - MergedAlicann CannNo ratings yet
- Session 17Document15 pagesSession 17Alicann CannNo ratings yet
- Session 13Document14 pagesSession 13Alicann CannNo ratings yet
- Session 20Document7 pagesSession 20Alicann CannNo ratings yet
- W 52 L XVcbtmbiksp Qsidaf Kij RF Lce ZBCDocument48 pagesW 52 L XVcbtmbiksp Qsidaf Kij RF Lce ZBCAlicann CannNo ratings yet
- Ara Tasarım Raporu OrnekDocument22 pagesAra Tasarım Raporu OrnekAlicann CannNo ratings yet
- 10 HaftaDocument16 pages10 HaftaAlicann CannNo ratings yet
- Stress Medical StudentsDocument11 pagesStress Medical StudentsAlicann CannNo ratings yet
- Example Final Mechatronics ReportDocument4 pagesExample Final Mechatronics ReportAlicann CannNo ratings yet
- Apicom Eddy - Current - CatologueDocument43 pagesApicom Eddy - Current - CatologueJoan Maria CarullaNo ratings yet
- WH609-716 M Weam005900 WH6 WH7Document254 pagesWH609-716 M Weam005900 WH6 WH7Carlos Israel Gomez100% (3)
- Assault Air Bike: Assembly InstructionsDocument10 pagesAssault Air Bike: Assembly Instructionsrpa 007No ratings yet
- B13. Compressor Oil System - Kenco Klce Oil Level ControllersDocument7 pagesB13. Compressor Oil System - Kenco Klce Oil Level ControllersKleiber OrtegaNo ratings yet
- Cylinder Clamp Andi Muh. Yusdana 34220085Document14 pagesCylinder Clamp Andi Muh. Yusdana 34220085sri wahyuniNo ratings yet
- TR2343 - Preservation Requirements For Supplier PackagesDocument10 pagesTR2343 - Preservation Requirements For Supplier Packagesmaximusala83No ratings yet
- Sarathkumar Sebastin 2021 IOP Conf. Ser. Mater. Sci. Eng. 1128 012035Document12 pagesSarathkumar Sebastin 2021 IOP Conf. Ser. Mater. Sci. Eng. 1128 012035Turk SoloNo ratings yet
- CompofPipeCarryCapR 12Document1 pageCompofPipeCarryCapR 12Dr. Zakir HorizontalNo ratings yet
- Steel Design: Project Job Number EngineerDocument1 pageSteel Design: Project Job Number Engineerchirathip vasuvattakulNo ratings yet
- Assignment # 01Document17 pagesAssignment # 01inam ullahNo ratings yet
- Greasing and ChurningDocument7 pagesGreasing and ChurningHenrique Do PradoNo ratings yet
- Practical Exercise: Putting Seawater Cooling System To ServiceDocument1 pagePractical Exercise: Putting Seawater Cooling System To ServiceJohnarey Galve PantuaNo ratings yet
- EnglishDocument160 pagesEnglishYoussef MoutaouajNo ratings yet
- Oil Tanking Insp QuestrDocument10 pagesOil Tanking Insp QuestrpradeepNo ratings yet
- Improvement of A Multiphase Flow Model For Wellhead Chokes Under Critical and Subcritical Conditions Using Field DataDocument17 pagesImprovement of A Multiphase Flow Model For Wellhead Chokes Under Critical and Subcritical Conditions Using Field DataBEHNAM FALLAHNo ratings yet
- Lecture Note - CMM - 103300Document32 pagesLecture Note - CMM - 103300Kif KimiNo ratings yet
- Chapter 1: Basic Definitions: Plane Motion Angular Velocity Angular AccelerationDocument17 pagesChapter 1: Basic Definitions: Plane Motion Angular Velocity Angular AccelerationKarim KMNo ratings yet
- BES Notes For IA 1Document19 pagesBES Notes For IA 1swathiNo ratings yet
- BPDocument36 pagesBPThiruvenkatasamy Elangovan100% (2)
- Embedment Design Examples: ACI 349.2R-97Document26 pagesEmbedment Design Examples: ACI 349.2R-97guillermoNo ratings yet
- Unit 1Document5 pagesUnit 1N Dhanunjaya Rao BorraNo ratings yet
- V-25 Series Euro - Tech Specifications-1Document8 pagesV-25 Series Euro - Tech Specifications-1Jas SumNo ratings yet
- SWR Pipe LiteratureDocument4 pagesSWR Pipe Literaturenavin jollyNo ratings yet
- Glycol De-Hydrator DesignDocument30 pagesGlycol De-Hydrator DesignNana TwumNo ratings yet
- Rear View Left Side View: Electrical System C13, C15, and C18 Generator SetDocument2 pagesRear View Left Side View: Electrical System C13, C15, and C18 Generator SetjorgeNo ratings yet