Download as pdf or txt
You might also like
- AmpliadoresDocument2 pagesAmpliadoressergio tolozaNo ratings yet
- RXDC - My RayDocument2 pagesRXDC - My RayMedical DXBNo ratings yet
- Total Air Solution Provider: LG Electronics VietnamDocument8 pagesTotal Air Solution Provider: LG Electronics VietnamCong VietNo ratings yet
- RH-FH - Prospect L (NA) - 09064-A (03.12)Document2 pagesRH-FH - Prospect L (NA) - 09064-A (03.12)v.canola seracisNo ratings yet
- MyRay RXDC HypersphereDocument4 pagesMyRay RXDC HypersphereMedical DXBNo ratings yet
- MR RXDC Wired GBDocument2 pagesMR RXDC Wired GBduong nguyenNo ratings yet
- FANUC Datasheet-R-2000ic-165fDocument1 pageFANUC Datasheet-R-2000ic-165fSYAHRIL AZLINo ratings yet
- Mini VRF Carrier DC PD CPDocument5 pagesMini VRF Carrier DC PD CPRaul RamirezNo ratings yet
- 42H10 Service ManualDocument46 pages42H10 Service ManualalgenygNo ratings yet
- Preliminary: Xxx-Xxxpol / 65° Az 17.5 / 17.2 / 17.3 DbiDocument2 pagesPreliminary: Xxx-Xxxpol / 65° Az 17.5 / 17.2 / 17.3 DbiJorgeNo ratings yet
- Datasheet R 2000ic 210fDocument1 pageDatasheet R 2000ic 210fLdkfkñjwzjNo ratings yet
- R-2000iC - 210F Product Information - 342 PDFDocument1 pageR-2000iC - 210F Product Information - 342 PDFYosafat SustaitaNo ratings yet
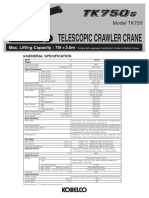
- Telescopic Crawler Crane: Model TK750Document6 pagesTelescopic Crawler Crane: Model TK750Mohan CharanchathNo ratings yet
- Mic Headset Aviation Bose A20 755-0029Document1 pageMic Headset Aviation Bose A20 755-0029Fredson SidileneNo ratings yet
- CONTROL CABINET Painel de PotenciaDocument5 pagesCONTROL CABINET Painel de Potenciaviniciuslimatorres12No ratings yet
- 4C 26R Amphenol 6878300 PDFDocument2 pages4C 26R Amphenol 6878300 PDFMartín Córdoba GetarNo ratings yet
- HR106X Ultra Thin DMR RepeaterDocument2 pagesHR106X Ultra Thin DMR Repeatersadameto91No ratings yet
- Yk 350 XGDocument2 pagesYk 350 XGjet.heNo ratings yet
- Gripper Series: Thin Slide TypeDocument2 pagesGripper Series: Thin Slide TypehoangnuceNo ratings yet
- Instructions and Cautions For Safe Use of AC Servos: General-Purpose AC Servo CautionDocument1 pageInstructions and Cautions For Safe Use of AC Servos: General-Purpose AC Servo CautiontadyNo ratings yet
- Laser Fotocoagulador PDFDocument6 pagesLaser Fotocoagulador PDFJenniffer F0% (1)
- Yk 400 XGDocument2 pagesYk 400 XGjet.heNo ratings yet
- Powerflex 525 Adjustable Frequency Ac Drive: Product InformationDocument2 pagesPowerflex 525 Adjustable Frequency Ac Drive: Product InformationLuis D GonzalezNo ratings yet
- New Possibilities: All-InclusiveDocument6 pagesNew Possibilities: All-InclusiveAlberto Suazo BasaezNo ratings yet
- Duropal HPL EsaDocument2 pagesDuropal HPL EsaBenigno FerroNo ratings yet
- Valve Cross SectionDocument1 pageValve Cross SectionJaya PrakashNo ratings yet
- Graphtec FC9000Document4 pagesGraphtec FC9000Shizakiena RoshaNo ratings yet
- Ha60w C-8ceDocument2 pagesHa60w C-8ceriskiyendraputraNo ratings yet
- Folleto Ham-Let Valvulas de Instrumentacion y ConectoresDocument2 pagesFolleto Ham-Let Valvulas de Instrumentacion y ConectoresRicardo Cabrera OsinagaNo ratings yet
- Multi V-SDocument11 pagesMulti V-SbelharecheNo ratings yet
- 16 LS 600h L / LS 600h (Before Nov. 2009 Production) (Cont. Next Page)Document3 pages16 LS 600h L / LS 600h (Before Nov. 2009 Production) (Cont. Next Page)Waleed AlshgaaaNo ratings yet
- CPM1A-DA041: Operating ManualDocument2 pagesCPM1A-DA041: Operating Manualomnitech2No ratings yet
- YK1200X 400 RCX340-4: Standard Type: Large TypeDocument1 pageYK1200X 400 RCX340-4: Standard Type: Large TypeJuan David Valderrama ArtunduagaNo ratings yet
- Handling Robot: Fast, Slim and AccurateDocument2 pagesHandling Robot: Fast, Slim and AccuratePavitra ShahNo ratings yet
- Trusted Technology, Reliable Protection and Insulation.: 3M Heat Shrink Tubing and DevicesDocument48 pagesTrusted Technology, Reliable Protection and Insulation.: 3M Heat Shrink Tubing and DevicesJan sandi FloresNo ratings yet
- Fiberposter PDFDocument1 pageFiberposter PDFÁngel MorenoNo ratings yet
- CascadDocument4 pagesCascadNiran ChamikaNo ratings yet
- Lizards - Flow SwitchDocument1 pageLizards - Flow SwitchKiệt TrầnNo ratings yet
- L Toshiba Inverter VF-P7-TSB User ManualDocument12 pagesL Toshiba Inverter VF-P7-TSB User ManualKhaled MoncerNo ratings yet
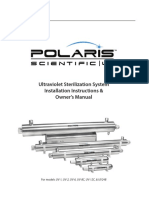
- Ultraviolet Sterilization System Installation Instructions & Owner's ManualDocument10 pagesUltraviolet Sterilization System Installation Instructions & Owner's ManualReyna OrihuelaNo ratings yet
- SPM A Duct IonsDocument2 pagesSPM A Duct Ionsallmee2No ratings yet
- R 2000ic 100P Flyer ENDocument2 pagesR 2000ic 100P Flyer ENperop123No ratings yet
- 8511a 5 10 20K - DS - 091718Document3 pages8511a 5 10 20K - DS - 091718armindocalatravaNo ratings yet
- Netstar Offline UpsDocument2 pagesNetstar Offline UpsismaelmNo ratings yet
- SR-20iA: Max. Load Capacity at Wrist: 20 KG Max. Reach: 1100 MMDocument1 pageSR-20iA: Max. Load Capacity at Wrist: 20 KG Max. Reach: 1100 MMJesus R. Bernal SalazarNo ratings yet
- UNIVERSAL PULLING TOOL - American Completion ToolsDocument2 pagesUNIVERSAL PULLING TOOL - American Completion ToolsVivianNo ratings yet
- Datasheet Lrmate 200id 7cDocument1 pageDatasheet Lrmate 200id 7cjet.heNo ratings yet
- RF JumperDocument1 pageRF JumperSheena Camille ManalangNo ratings yet
- Belt For TextileDocument6 pagesBelt For TextileArio DigdoyoNo ratings yet
- 64-2103 Tweco Supra XT SEDHDocument2 pages64-2103 Tweco Supra XT SEDHcarlosNo ratings yet
- Versatile Small Cranes With Optimised Power-To-Weight Ratio For Light-Weight Commercial VehiclesDocument12 pagesVersatile Small Cranes With Optimised Power-To-Weight Ratio For Light-Weight Commercial VehiclessmilewithbalajithNo ratings yet
- OHC Singgle Girder SWL 2x3,2 T MDO - R00BDocument1 pageOHC Singgle Girder SWL 2x3,2 T MDO - R00BFebri Heru PurnomoNo ratings yet
- C99 Mitsubishi L06055engfDocument40 pagesC99 Mitsubishi L06055engfNguyen Danh HuyNo ratings yet
- Electro-Pneumatic Positioner: 5 200Hz IEC 60529 IP65 5 200Hz IEC 60529 IP65Document12 pagesElectro-Pneumatic Positioner: 5 200Hz IEC 60529 IP65 5 200Hz IEC 60529 IP65محمدNo ratings yet
- Lithonia rsxf2 Flood LedDocument8 pagesLithonia rsxf2 Flood LedGirlie Iglesia San BuenaventuraNo ratings yet
- Digital Copeland Receiver UnitsDocument2 pagesDigital Copeland Receiver UnitsLefti YMNo ratings yet
- LR Mate 200id - 7C Product Information - 273Document1 pageLR Mate 200id - 7C Product Information - 273Nick SteekNo ratings yet
- Proxxon Micromot New Products 2024Document6 pagesProxxon Micromot New Products 2024Vlad RoșoiNo ratings yet
- UMTS - RNS - I - 08 - 20090530 Antenna Feeder - Grounding - Antilightning PrincipleDocument31 pagesUMTS - RNS - I - 08 - 20090530 Antenna Feeder - Grounding - Antilightning PrincipleMohamed AbdelkaderNo ratings yet
- Modelling of Vibrations of Overhead Line Conductors: Assessment of the TechnologyFrom EverandModelling of Vibrations of Overhead Line Conductors: Assessment of the TechnologyGiorgio DianaNo ratings yet
- Management Information System: Bba LLB by The - Lawgical - WorldDocument15 pagesManagement Information System: Bba LLB by The - Lawgical - WorldK venkataiahNo ratings yet
- Chapter 5 NetworkDocument77 pagesChapter 5 NetworkMr. Jack 1106No ratings yet
- Math Works Web in Ar Power Train Full VehiclesDocument46 pagesMath Works Web in Ar Power Train Full VehiclesAtharva Joshi.No ratings yet
- Refrigerant Compressor - Remove and Install: Cerrar SIS Pantalla AnteriorDocument7 pagesRefrigerant Compressor - Remove and Install: Cerrar SIS Pantalla AnteriorDiego LiraNo ratings yet
- MTD Microwave Techniques and Devices TEXTDocument551 pagesMTD Microwave Techniques and Devices TEXTARAVINDNo ratings yet
- BA100E D255 Diesel Close 5620001338Document6 pagesBA100E D255 Diesel Close 5620001338Andrie AdhynataNo ratings yet
- 207D Summary 15 UK S03Document20 pages207D Summary 15 UK S03najibNo ratings yet
- 08 VESDA Cold Stores App Brochure A4 LoresDocument4 pages08 VESDA Cold Stores App Brochure A4 LoresPepe ZapataNo ratings yet
- Chain DrivesDocument2 pagesChain DrivescamalielNo ratings yet
- Brief: Single-Chip Ieee 802.11N/Bluetooth/Fm (RX and TX)Document2 pagesBrief: Single-Chip Ieee 802.11N/Bluetooth/Fm (RX and TX)Anonymous oTrMzaNo ratings yet
- 08 Exhaust ValveDocument66 pages08 Exhaust ValveSky RNo ratings yet
- GSM and LTE Spectrum Concurrency (SRAN18.1 - Draft A)Document93 pagesGSM and LTE Spectrum Concurrency (SRAN18.1 - Draft A)VVLNo ratings yet
- M4 Ship-Board Energy Management - IMO TTT Course Presentation Final1Document84 pagesM4 Ship-Board Energy Management - IMO TTT Course Presentation Final1Topoleanu Doru FlorinNo ratings yet
- Anatomy of Core Network Elements Josef UngermanDocument52 pagesAnatomy of Core Network Elements Josef UngermanMaxim PicconiNo ratings yet
- PD D27 09L 02e - 609 - PDMDocument8 pagesPD D27 09L 02e - 609 - PDMratheeshkumardNo ratings yet
- DE Monthly Assessment - IDocument5 pagesDE Monthly Assessment - IJay Kakadiya100% (1)
- 1 Introduction To DCNDocument39 pages1 Introduction To DCNIndira KunduNo ratings yet
- HadoopDocument3 pagesHadoopArun Kumar AwasthiNo ratings yet
- Neeltra ProfileDocument40 pagesNeeltra ProfileMohamed Omer Hassan100% (1)
- Structural GlazingDocument1 pageStructural Glazing48 Nishant dhimanNo ratings yet
- Yogeshwar BrochureDocument16 pagesYogeshwar BrochureDanish KhandelwalNo ratings yet
- LAB 10 JawwadDocument5 pagesLAB 10 JawwadHey MarkoNo ratings yet
- Voxengo SPAN Plus User Guide enDocument8 pagesVoxengo SPAN Plus User Guide enMarin GanciuNo ratings yet
- CAPS - 3170507 - Coomon Assignment With AcknowDocument12 pagesCAPS - 3170507 - Coomon Assignment With AcknowVarun pandeyNo ratings yet
- Visa USA Interchange Reimbursement FeesDocument26 pagesVisa USA Interchange Reimbursement FeesMark Jasper DabuNo ratings yet
- HP Envy x360 Convertible 15m-Eu0043dx OverviewDocument2 pagesHP Envy x360 Convertible 15m-Eu0043dx Overviewrom mNo ratings yet
- Integrated MBA (IMBA) Programme - V Semester SyllabusDocument9 pagesIntegrated MBA (IMBA) Programme - V Semester SyllabusRishabh KumarNo ratings yet
- Early Hot Spot Detection Enabling Condition-Based MaintenanceDocument4 pagesEarly Hot Spot Detection Enabling Condition-Based Maintenancesridhar30481647No ratings yet
- Personal Resume For EngineerDocument3 pagesPersonal Resume For EngineerwhatehoNo ratings yet
- CruiseControl Diagnostics2004 PDFDocument48 pagesCruiseControl Diagnostics2004 PDFDanno NNo ratings yet