Download as pdf or txt
You might also like
- Boost ConveterDocument27 pagesBoost ConveterMohamedNo ratings yet
- Force Commutated InvertersDocument55 pagesForce Commutated InverterssyukurkkNo ratings yet
- Pe Final Ex SS 2010-2011Document8 pagesPe Final Ex SS 2010-2011Saif Uddin100% (1)
- NmosDocument31 pagesNmosMichael BradfieldNo ratings yet
- Gpdk180 DRMDocument313 pagesGpdk180 DRMvpsampathNo ratings yet
- GATE (1991-2010) Solved Papers EEDocument261 pagesGATE (1991-2010) Solved Papers EEqwer0% (1)
- Analogue ElectronicsDocument7 pagesAnalogue ElectronicsrizwanahbNo ratings yet
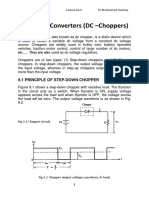
- Choppers and Cyclo ConvertersDocument12 pagesChoppers and Cyclo ConvertersPaul MatshonaNo ratings yet
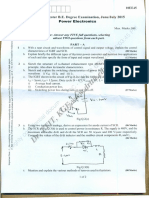
- Model Question Paper Power Electronics: Sub code:-06EE45Document3 pagesModel Question Paper Power Electronics: Sub code:-06EE45GuruprasadNo ratings yet
- T S Ia SDocument7 pagesT S Ia S1nshsankritNo ratings yet
- MST 2 P1 (Ex-502)Document36 pagesMST 2 P1 (Ex-502)ASHISH SINGH SENGARNo ratings yet
- DC Motor Controller DesignDocument6 pagesDC Motor Controller Designudit mimaniNo ratings yet
- X10401 (Ee8552)Document3 pagesX10401 (Ee8552)Sujesh ChittarikkalNo ratings yet
- AlexanderCh16final R1Document19 pagesAlexanderCh16final R1utpNo ratings yet
- Laboratory NR 6Document5 pagesLaboratory NR 6IonutNo ratings yet
- 44968911-Exp-1 PSIMDocument35 pages44968911-Exp-1 PSIMJorge CasaliniNo ratings yet
- Parallel Reasonance ConverterDocument43 pagesParallel Reasonance Converterchong151190No ratings yet
- Space Vector ModulationDocument3 pagesSpace Vector ModulationMukul DasNo ratings yet
- TF Armature Controlled DC MotorDocument9 pagesTF Armature Controlled DC Motoremail2vadivel100% (2)
- Q.1 To Q.20 Carry One Mark Each: 5 Rad/s, 2.38 0.667Document23 pagesQ.1 To Q.20 Carry One Mark Each: 5 Rad/s, 2.38 0.667Pawan ChandaniNo ratings yet
- Small-Signal Model of A 5kW High-Output Voltage Capacitive-Loaded Series-Parallel Resonant DC-DC ConverterDocument7 pagesSmall-Signal Model of A 5kW High-Output Voltage Capacitive-Loaded Series-Parallel Resonant DC-DC ConverterAshok KumarNo ratings yet
- GATE EE 2006 With SolutionsDocument56 pagesGATE EE 2006 With Solutionspwnkumar63100% (1)
- Report Part 3Document22 pagesReport Part 3Anonymous FlikAMNo ratings yet
- GATE EE 2004 With Solutions PDFDocument57 pagesGATE EE 2004 With Solutions PDFharshdce60No ratings yet
- ECX3230 - Electronics Assignment No. 02 (Due Date: See The Activity Diary)Document3 pagesECX3230 - Electronics Assignment No. 02 (Due Date: See The Activity Diary)Lalantha Munasinghe ArachchiNo ratings yet
- DC-DC Converter - QuadraticDocument11 pagesDC-DC Converter - Quadraticvasu.jain20022002No ratings yet
- 9A02504 Power ElectronicsDocument4 pages9A02504 Power ElectronicssivabharathamurthyNo ratings yet
- Tutorial of Non-Isolated DC-DC Converters in Discontinuous Mode (Benny Yeung)Document5 pagesTutorial of Non-Isolated DC-DC Converters in Discontinuous Mode (Benny Yeung)Shah ZaibNo ratings yet
- 9A02504 Power ElectronicsDocument4 pages9A02504 Power ElectronicssivabharathamurthyNo ratings yet
- Averaged Switch Modeling,: AC Equivalent Circuit ModelingDocument12 pagesAveraged Switch Modeling,: AC Equivalent Circuit ModelingJulián RincónNo ratings yet
- Switched Capacitor Signal Conditioning For Push-Pull Type Capacitive SensorsDocument4 pagesSwitched Capacitor Signal Conditioning For Push-Pull Type Capacitive SensorssriraghavrNo ratings yet
- Power Electronics Summative 202 SaturdayDocument3 pagesPower Electronics Summative 202 SaturdayTấn Long Đoàn NguyễnNo ratings yet
- Dr. TTIT, KGF WWW - Drttit.edu - in Dr. TTIT, KGF WWW - Drttit.edu - inDocument2 pagesDr. TTIT, KGF WWW - Drttit.edu - in Dr. TTIT, KGF WWW - Drttit.edu - inrama KrishnaNo ratings yet
- Stucor QP Ee8552Document21 pagesStucor QP Ee8552Raagul SNo ratings yet
- Exp 2Document6 pagesExp 2College ISMNo ratings yet
- PT 1Document5 pagesPT 1Karthik BolluNo ratings yet
- Flyback PDFDocument11 pagesFlyback PDFlucianoNo ratings yet
- Ioc DT P 2004 22Document14 pagesIoc DT P 2004 22api-27199346No ratings yet
- L1, Sinusoids, Phasors and ResonanceDocument18 pagesL1, Sinusoids, Phasors and ResonanceEleonor Sy RoscoNo ratings yet
- Assignment # 1: V IR Idt CDocument4 pagesAssignment # 1: V IR Idt Ctariqicp056No ratings yet
- PE - Logbook - Tushar TaruDocument14 pagesPE - Logbook - Tushar TaruTushar TaruNo ratings yet
- Ee366 Chap 2 5Document25 pagesEe366 Chap 2 5Michael Adu-boahenNo ratings yet
- PE Lecture No.09Document16 pagesPE Lecture No.09Nikhil GobhilNo ratings yet
- E 62012005Document11 pagesE 62012005PankajSinghBhati0% (1)
- T T DT D DT T DQ T I I C I E: ExercisesDocument21 pagesT T DT D DT T DQ T I I C I E: Exerciseskahina100% (1)
- EDC Question-Papers Complete SetDocument13 pagesEDC Question-Papers Complete Setselvi04120% (1)
- Aptransco Electronic Engn 2011 Previous Paper 5c60dbb7Document22 pagesAptransco Electronic Engn 2011 Previous Paper 5c60dbb7Navyadeepika. KokkiralaNo ratings yet
- S D S D D D S S D D S: P N N PDocument5 pagesS D S D D D S S D D S: P N N PPankajSinghBhatiNo ratings yet
- L13 Three Phase Fully Controlled Bridge ConverterDocument29 pagesL13 Three Phase Fully Controlled Bridge Converterapi-19951707No ratings yet
- Module 4: DC-DC Converters: Lec 9: DC-DC Converters For EV and HEV ApplicationsDocument55 pagesModule 4: DC-DC Converters: Lec 9: DC-DC Converters For EV and HEV ApplicationsFabricioNo ratings yet
- Switch Mode Power Supply (SMPS) Topologies (Part II)Document108 pagesSwitch Mode Power Supply (SMPS) Topologies (Part II)Willie WalkerNo ratings yet
- Electronic Circuit Analysis (ELE - 201) RCS (Makeup)Document2 pagesElectronic Circuit Analysis (ELE - 201) RCS (Makeup)Abhijan Carter BiswasNo ratings yet
- Aris 01Document8 pagesAris 01zaid aihsanNo ratings yet
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsFrom EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- LAB ReportDocument12 pagesLAB ReportahmadNo ratings yet
- Design and Application Guide For High Speed MOSFET Gate Drive CircuitsDocument37 pagesDesign and Application Guide For High Speed MOSFET Gate Drive CircuitswewNo ratings yet
- Mu SyllabusDocument21 pagesMu SyllabusDurgeshNo ratings yet
- DS PRK3BstandardEL en 50105364Document6 pagesDS PRK3BstandardEL en 50105364Artemis StateNo ratings yet
- TIP31A/31B/31C TIP32A/32B/32C: Complementary Silicon Power TransistorsDocument4 pagesTIP31A/31B/31C TIP32A/32B/32C: Complementary Silicon Power TransistorsIrfan ArifinNo ratings yet
- Transistor: What Is A Transistor and How Does It WorkDocument7 pagesTransistor: What Is A Transistor and How Does It WorkmonalisaNo ratings yet
- Chapter 4:jfet: Junction Field Effect TransistorDocument68 pagesChapter 4:jfet: Junction Field Effect TransistorelectricKKTMNo ratings yet
- Ec1201 EdcDocument6 pagesEc1201 Edca_aravind_007No ratings yet
- 90210-1247DEI E-Series Optional Harness ManualDocument50 pages90210-1247DEI E-Series Optional Harness ManualLászló NémethNo ratings yet
- Motorola Bipolar ChopperDocument6 pagesMotorola Bipolar ChopperSimon SimonNo ratings yet
- Battery Charger Circuit Using SCRDocument22 pagesBattery Charger Circuit Using SCRHiếu Dương100% (1)
- EC205 Electronic Circuits PDFDocument2 pagesEC205 Electronic Circuits PDFplbonifus0% (1)
- Group 8 - Final RequirementDocument50 pagesGroup 8 - Final RequirementJERUSHA ANNE RETARDONo ratings yet
- Assignment For EdcDocument2 pagesAssignment For EdcShamia SathishNo ratings yet
- 2n3553 PDFDocument2 pages2n3553 PDFEzequiel MedeirosNo ratings yet
- EE2027 - Consolidated List of Equations (Mid-Term Quiz)Document5 pagesEE2027 - Consolidated List of Equations (Mid-Term Quiz)NixNo ratings yet
- Delta Ia-Tc Dpa Om en 20180510Document9 pagesDelta Ia-Tc Dpa Om en 20180510hyran1973No ratings yet
- Ir Remote Control Fan and Light Switching ProjectDocument19 pagesIr Remote Control Fan and Light Switching Projectramuswamy j100% (1)
- BJT Fet Amp Op OsciDocument7 pagesBJT Fet Amp Op OsciRaine LopezNo ratings yet
- Study Material: Downloaded From VedantuDocument13 pagesStudy Material: Downloaded From Vedantukrishnakant darjiNo ratings yet
- Balluff 315634 Object Detection CatalogDocument612 pagesBalluff 315634 Object Detection CatalogBalluff SensorsNo ratings yet
- Catalogo Pnematic & Blautek PDFDocument40 pagesCatalogo Pnematic & Blautek PDFgustavoba7No ratings yet
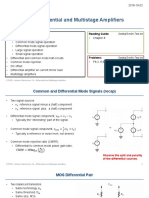
- F9 - Differential and Multistage Amplifiers: Reading Guide OutlineDocument23 pagesF9 - Differential and Multistage Amplifiers: Reading Guide OutlineNaveenNo ratings yet
- Apostila - Matemática Computacional - Adérito Araújo - Univ. de Coimbra, PortugalDocument29 pagesApostila - Matemática Computacional - Adérito Araújo - Univ. de Coimbra, PortugalAntonio PortelaNo ratings yet
- Proximity Sensor PDFDocument24 pagesProximity Sensor PDFRogério HernandezNo ratings yet
- In-Sight 7000 Series Vision System Installation ManualDocument42 pagesIn-Sight 7000 Series Vision System Installation ManualjglunaNo ratings yet
- Chapter 8 Differential and Multistage Amplifiers Ee 3120 Microelectronics IIDocument22 pagesChapter 8 Differential and Multistage Amplifiers Ee 3120 Microelectronics IIswagat656No ratings yet
- Delta VFD E User Manual PDFDocument403 pagesDelta VFD E User Manual PDFInfoprime CharqueadasNo ratings yet