Download as pdf or txt
You might also like
- William Blakes Illustrations For Dantes Divine ComedyDocument298 pagesWilliam Blakes Illustrations For Dantes Divine Comedyraul100% (3)
- Corneal Imaging System Environment From EyesDocument19 pagesCorneal Imaging System Environment From EyesCuerpo IndigenaNo ratings yet
- Bruckert Imxw 2023Document7 pagesBruckert Imxw 2023Tamas LiszkaNo ratings yet
- Microlensing Flux Ratio Predictions For Euclid: G. VernardosDocument14 pagesMicrolensing Flux Ratio Predictions For Euclid: G. Vernardosr_jerez_fisNo ratings yet
- Visual Acuity in Insects: Michael F. LandDocument31 pagesVisual Acuity in Insects: Michael F. Landonoy1990No ratings yet
- 1999 ICCV - Vision in Bad WeatherDocument8 pages1999 ICCV - Vision in Bad WeatheragaldranNo ratings yet
- Vision Research: Dicle N. Dövenciog Lu, Maarten W.A. Wijntjes, Ohad Ben-Shahar, Katja DoerschnerDocument13 pagesVision Research: Dicle N. Dövenciog Lu, Maarten W.A. Wijntjes, Ohad Ben-Shahar, Katja DoerschnerDare KawatashiNo ratings yet
- Modelling Human Visual Navigation Using Multi-View Scene ReconstructionDocument16 pagesModelling Human Visual Navigation Using Multi-View Scene ReconstructionamandaNo ratings yet
- Daylight Patterns As A Means To in Uence The Spatial Ambience: A Preliminary StudyDocument7 pagesDaylight Patterns As A Means To in Uence The Spatial Ambience: A Preliminary StudyCalle EldaNo ratings yet
- Cambridge Books OnlineDocument11 pagesCambridge Books OnlineyadielNo ratings yet
- remotesensing-TJNU DATASETDocument18 pagesremotesensing-TJNU DATASETMeenaNo ratings yet
- Advances and Applications of Atomic-Resolution ScaDocument53 pagesAdvances and Applications of Atomic-Resolution ScaReidiner Roberto ReinaNo ratings yet
- Johnson 2016 ApJ 833 74Document11 pagesJohnson 2016 ApJ 833 74derekburrellNo ratings yet
- Vision-And-Motion-Based Spatial Characterization of Open SpaceDocument16 pagesVision-And-Motion-Based Spatial Characterization of Open SpaceXI LUNo ratings yet
- Tele Immersion DocumentationDocument16 pagesTele Immersion Documentationnaveenjawalkar0% (1)
- Experimental Evidence of An Effective Medium Seen by Diffuse Light in Turbid ColloidsDocument8 pagesExperimental Evidence of An Effective Medium Seen by Diffuse Light in Turbid ColloidsvespacthNo ratings yet
- Defaults in Stereoscopic and Kinetic Depth Perception: Leonid L. KontsevichDocument8 pagesDefaults in Stereoscopic and Kinetic Depth Perception: Leonid L. KontsevichItis WhatitisNo ratings yet
- Depth ReliefDocument12 pagesDepth ReliefJoseph WhiteNo ratings yet
- JGR Solid Earth - 2018 - Anantrasirichai - Application of Machine Learning To Classification of Volcanic Deformation inDocument15 pagesJGR Solid Earth - 2018 - Anantrasirichai - Application of Machine Learning To Classification of Volcanic Deformation insen duNo ratings yet
- Can Face Masks Offer Protection From Airborne Sneeze and Cough Droplets in Close-Up, Face-To-Face Human Interactions? - A Quantitative StudyDocument7 pagesCan Face Masks Offer Protection From Airborne Sneeze and Cough Droplets in Close-Up, Face-To-Face Human Interactions? - A Quantitative StudyStepan81No ratings yet
- The Significance of Microsaccades For VIDocument21 pagesThe Significance of Microsaccades For VITuany De Assis PereiraNo ratings yet
- Schaefer 1990 PASP 102 212Document18 pagesSchaefer 1990 PASP 102 212Max Jenkinson100% (1)
- Ji2020 Article LandslidedetectionfromanopensaDocument17 pagesJi2020 Article Landslidedetectionfromanopensayuri_yudhaswanaNo ratings yet
- Insects Could Exploit UV) Green Contrast For Landmark NavigationDocument13 pagesInsects Could Exploit UV) Green Contrast For Landmark NavigationayakashimajorinNo ratings yet
- Entropy 23 01377 v2Document13 pagesEntropy 23 01377 v2blarbjunkNo ratings yet
- Anthony Aguirre and Matthew C Johnson - A Status Report On The Observability of Cosmic Bubble CollisionsDocument31 pagesAnthony Aguirre and Matthew C Johnson - A Status Report On The Observability of Cosmic Bubble CollisionsGijke3No ratings yet
- Optical Technique DPIV in Measurements of Granular Material Ows, Part 1 of 3-Plane HoppersDocument10 pagesOptical Technique DPIV in Measurements of Granular Material Ows, Part 1 of 3-Plane HoppersCynosure SkyNo ratings yet
- Droplet Size Distributions in Turbulent Clouds: Experimental Evaluation of Theoretical DistributionsDocument24 pagesDroplet Size Distributions in Turbulent Clouds: Experimental Evaluation of Theoretical DistributionsAtif KhanNo ratings yet
- Costantino Et Al 2010 GRL Analysis of Aerosol Cloud Interaction From Multi Sensor SatelliteDocument5 pagesCostantino Et Al 2010 GRL Analysis of Aerosol Cloud Interaction From Multi Sensor SatelliteanukrishnapNo ratings yet
- Density: ρ and v, respectively.)Document13 pagesDensity: ρ and v, respectively.)Searchand GoNo ratings yet
- Clark - Unravelling The Golden BraidDocument9 pagesClark - Unravelling The Golden BraidDavid_Silverma_8933No ratings yet
- Remote Sens Ecol Conserv - 2022 - MoellerDocument13 pagesRemote Sens Ecol Conserv - 2022 - Moellereir235dNo ratings yet
- Visual Space - KoenderinkDocument13 pagesVisual Space - KoenderinkdavidrojasvNo ratings yet
- Window Shades: Selecting Optical Properties For Visual ComfortDocument9 pagesWindow Shades: Selecting Optical Properties For Visual ComfortSema Zeybel ÖzdenNo ratings yet
- Estimating The Illumination Direction From Three-Dimensional Texture of Brownian SurfacesDocument18 pagesEstimating The Illumination Direction From Three-Dimensional Texture of Brownian SurfacesJoseph WhiteNo ratings yet
- Motion Sensors-Based Human Behavior RDocument13 pagesMotion Sensors-Based Human Behavior Rkimsunga16No ratings yet
- Circadian Light: Review Open AccessDocument10 pagesCircadian Light: Review Open AccessHolman Cubides GarzonNo ratings yet
- Godino PaperDocument12 pagesGodino Papermd manjurul ahsanNo ratings yet
- International Journal of Multiphase FlowDocument8 pagesInternational Journal of Multiphase FlowApratim DasguptaNo ratings yet
- What Have We Already Learned From The Cosmic Microwave Background?Document8 pagesWhat Have We Already Learned From The Cosmic Microwave Background?blueomenNo ratings yet
- Veysset Et Al-2016-Scientific Reports PDFDocument8 pagesVeysset Et Al-2016-Scientific Reports PDFKorabliki BlinNo ratings yet
- 10 1080@17540763 2020 1733641 PDFDocument23 pages10 1080@17540763 2020 1733641 PDFFabianeNo ratings yet
- Acta Astronautica: David A. Vallado, David FinklemanDocument25 pagesActa Astronautica: David A. Vallado, David FinklemanAmrullah Abdul QadirNo ratings yet
- Virtual Reality Urban Planning PDFDocument21 pagesVirtual Reality Urban Planning PDFRuxi NeaguNo ratings yet
- 1 s2.0 S0042698917300937 Main 2Document11 pages1 s2.0 S0042698917300937 Main 2aprivatesyaNo ratings yet
- The Interaction Between Vision and Eye MovementsDocument25 pagesThe Interaction Between Vision and Eye MovementsCarlos TresemeNo ratings yet
- KaleideskopDocument7 pagesKaleideskopmhanandhahikanNo ratings yet
- Medical Optics (2016-2017) - 2 Marks With AnswerSDocument28 pagesMedical Optics (2016-2017) - 2 Marks With AnswerSBharath VNo ratings yet
- Geophysical Research Letters - 2020 - Gristey - On The Relationship Between Shallow Cumulus Cloud Field Properties andDocument8 pagesGeophysical Research Letters - 2020 - Gristey - On The Relationship Between Shallow Cumulus Cloud Field Properties andJoe LewisNo ratings yet
- Underwater Optical Imaging: Status and ProspectsDocument12 pagesUnderwater Optical Imaging: Status and Prospectsprashant4455No ratings yet
- Environment Matting and CompositingDocument10 pagesEnvironment Matting and CompositingdiegomfagundesNo ratings yet
- RSTB 2009 0138 PDFDocument9 pagesRSTB 2009 0138 PDFpriyankaprakasanpNo ratings yet
- MonteCarlo 1Document59 pagesMonteCarlo 1aasimalyNo ratings yet
- Non-Linear Volume Photon Mapping: Eurographics Symposium On Rendering (2005) Kavita Bala, Philip Dutré (Editors)Document11 pagesNon-Linear Volume Photon Mapping: Eurographics Symposium On Rendering (2005) Kavita Bala, Philip Dutré (Editors)Fundamentos ComputaciónNo ratings yet
- Social Distancing Analyzer Using Computer Vision - and Deep LearningDocument11 pagesSocial Distancing Analyzer Using Computer Vision - and Deep LearningRamdon BaehakiNo ratings yet
- 293 Opticsofmicroscopy JOPA07Document7 pages293 Opticsofmicroscopy JOPA07dewiNo ratings yet
- J.jenvman.2020.111623Document11 pagesJ.jenvman.2020.111623Muhammad GhazaliNo ratings yet
- Human Sensory Adaptation To The Ecological Structure of Environmental StatisticsDocument23 pagesHuman Sensory Adaptation To The Ecological Structure of Environmental Statisticsbronson.harryNo ratings yet
- Photon Beam DiffusionDocument11 pagesPhoton Beam DiffusionErick LedezmaNo ratings yet
- Lessons from the Masters: Current Concepts in Astronomical Image ProcessingFrom EverandLessons from the Masters: Current Concepts in Astronomical Image ProcessingNo ratings yet
- Madd - My NotesDocument1 pageMadd - My NotesAasim Ahmed ShaikhNo ratings yet
- IyiyDocument3 pagesIyiyAasim Ahmed ShaikhNo ratings yet
- WeweDocument2 pagesWeweAasim Ahmed ShaikhNo ratings yet
- FTFTDocument3 pagesFTFTAasim Ahmed ShaikhNo ratings yet
- EwdwcrDocument2 pagesEwdwcrAasim Ahmed ShaikhNo ratings yet
- 3A00146Document2,326 pages3A00146Aasim Ahmed ShaikhNo ratings yet
- Ananya Gym W13-17Document159 pagesAnanya Gym W13-17Aasim Ahmed ShaikhNo ratings yet
- JOItmC 07 00245Document16 pagesJOItmC 07 00245Aasim Ahmed ShaikhNo ratings yet
- On The Roll With The Environment: June 7, 20213 Min ReadDocument3 pagesOn The Roll With The Environment: June 7, 20213 Min Readkyzel colNo ratings yet
- Progress 2 - POD Emergency TeamDocument65 pagesProgress 2 - POD Emergency TeamGh4n113 IdNo ratings yet
- Villains & Vigilantes Character TemplatesDocument9 pagesVillains & Vigilantes Character TemplatesLink PelcherNo ratings yet
- Standards For Mobile Health-Related AppsDocument9 pagesStandards For Mobile Health-Related Appsharsono harsonoNo ratings yet
- Excel Basics RoadmapDocument3 pagesExcel Basics RoadmapLalatenduNo ratings yet
- ECSS U AS 10C Rev.1 (3december2019)Document8 pagesECSS U AS 10C Rev.1 (3december2019)Mansoor ShahNo ratings yet
- Sark Prime 4 BrochureDocument8 pagesSark Prime 4 BrochureHar DonNo ratings yet
- Experimentalstudies On The Effects of Reduction in Gear Tooth Stiffness Lubricant Film Thicknessina Spur Geared SystemDocument13 pagesExperimentalstudies On The Effects of Reduction in Gear Tooth Stiffness Lubricant Film Thicknessina Spur Geared SystemBurak TuncerNo ratings yet
- First FruitsDocument32 pagesFirst FruitsRodolfo Babilonia Jr100% (3)
- PDFViewer PDFDocument376 pagesPDFViewer PDFRaveendran Sukumaran PareshnathNo ratings yet
- World Religions Exam Review 2024Document3 pagesWorld Religions Exam Review 2024Marina SolakaNo ratings yet
- A Simulation-Based Optimization Methodology For FaDocument11 pagesA Simulation-Based Optimization Methodology For FahenokzewduNo ratings yet
- Bibliography: 10.1057/9781137403193 - Žižek and Performance, Edited by Broderick Chow and Alex MangoldDocument10 pagesBibliography: 10.1057/9781137403193 - Žižek and Performance, Edited by Broderick Chow and Alex MangolderwinNo ratings yet
- Understanding The Gender Pay Gap: Women in Business and ManagementDocument8 pagesUnderstanding The Gender Pay Gap: Women in Business and Managementmostafa aliNo ratings yet
- Programming Guide MSP 3dmj-230327-020747Document17 pagesProgramming Guide MSP 3dmj-230327-020747Pierfrancesco LucenteNo ratings yet
- Mermaid E1100iDocument55 pagesMermaid E1100ims.mishra8008No ratings yet
- 951 SignedDocument21 pages951 SignedDany GunawanNo ratings yet
- Aurora 3800 Especificaciones PDFDocument8 pagesAurora 3800 Especificaciones PDFCarlos PalmaNo ratings yet
- Setting Product Strategy: Marketing Management, 13 EdDocument43 pagesSetting Product Strategy: Marketing Management, 13 EdEucharistia Yacoba NugrahaNo ratings yet
- Mohr Online ExamDocument3 pagesMohr Online ExamNeenuSanthoshNo ratings yet
- Product Aiocd PDFDocument10 pagesProduct Aiocd PDFJames PerianayagamNo ratings yet
- Apostolic ConstitutionsDocument2 pagesApostolic ConstitutionsMarcel100% (1)
- Book 1 - Lesson 1 - HometownDocument6 pagesBook 1 - Lesson 1 - Hometown16SpeakNo ratings yet
- Aquafine DW Series ManualDocument19 pagesAquafine DW Series Manualjorman GuzmanNo ratings yet
- Copper Tube HandbookDocument66 pagesCopper Tube HandbookRafael Leonardo GomezNo ratings yet
- Hasegawa v. GironDocument5 pagesHasegawa v. Gironjohaldiel muringNo ratings yet
- 9 1 Cathode Ray OscilloscopeDocument14 pages9 1 Cathode Ray Oscilloscopesuemozac100% (6)
- Enrichment Activities 1Document2 pagesEnrichment Activities 1Maden betoNo ratings yet
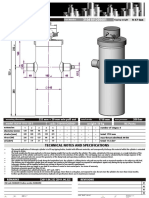
- Cilindro Penta Hydraulic PowerDocument1 pageCilindro Penta Hydraulic PowerUniversity FilesNo ratings yet