
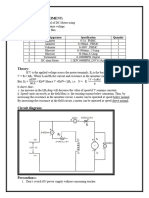
DC Shunt Motor Speed Control
DC Shunt Motor Speed Control
You might also like
- IB Physics D.1 PPT TEACHERDocument36 pagesIB Physics D.1 PPT TEACHERPio100% (2)
- Mg623 - Project Management PlanDocument79 pagesMg623 - Project Management PlanIBRAHIM NYIRENDANo ratings yet
- LAB REPORT NO 12 (Electrical Engineering)Document8 pagesLAB REPORT NO 12 (Electrical Engineering)Malik Hassaan SangraalNo ratings yet
- Earth-And-Life-Science-G11-Whlp-Week-1-2 - Quarter 2 HeDocument2 pagesEarth-And-Life-Science-G11-Whlp-Week-1-2 - Quarter 2 Hecristina maquinto100% (5)
- Lab 11 (Hardware Practice) PDFDocument7 pagesLab 11 (Hardware Practice) PDFzeeshan shaukatNo ratings yet
- Experiment 2Document4 pagesExperiment 2dhruvmistry300No ratings yet
- Starting, Speed Control....Document6 pagesStarting, Speed Control....dickmjoloNo ratings yet
- Experiment 3Document10 pagesExperiment 3عبدالعزيز شقحانNo ratings yet
- Speed Control of DC Shunt MotorDocument7 pagesSpeed Control of DC Shunt MotorAakash0% (1)
- Speed Control and Starting of A DC MotorDocument56 pagesSpeed Control and Starting of A DC MotorCarlos Arias LuyandoNo ratings yet
- Lab Info. - Synchronous Machine ExperimentsDocument3 pagesLab Info. - Synchronous Machine ExperimentsmikeNo ratings yet
- Ac Servo MotorDocument14 pagesAc Servo MotorJeyanthNo ratings yet
- Speed Control of DC Shunt Motor: A) Field Current Control B) Armature Voltage ControlDocument8 pagesSpeed Control of DC Shunt Motor: A) Field Current Control B) Armature Voltage ControlAkshit VSNo ratings yet
- Starting Methods of A DC MotorDocument8 pagesStarting Methods of A DC Motoragreykato100% (1)
- 9 Speed Control of DC Shunt MotorDocument4 pages9 Speed Control of DC Shunt MotormanishNo ratings yet
- Control Material Module IIDocument15 pagesControl Material Module IIAbiodun MustaphaNo ratings yet
- 9 Speed Control of DC Shunt MotorDocument4 pages9 Speed Control of DC Shunt MotorVaibhavNo ratings yet
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryDocument6 pagesExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalNo ratings yet
- Speed Control of DC MotorDocument15 pagesSpeed Control of DC Motorkrishnareddy_chintalaNo ratings yet
- OEL of Electrict Machine by Bolo EhsannDocument4 pagesOEL of Electrict Machine by Bolo EhsannEhsan Ullah BhuttaNo ratings yet
- Question No 1: Speed Control of DC MotorDocument10 pagesQuestion No 1: Speed Control of DC MotorProxima YusNo ratings yet
- Blocked Rotor TestDocument11 pagesBlocked Rotor TestIjabi100% (1)
- RBT Lab Manuval 11E608 CEDocument106 pagesRBT Lab Manuval 11E608 CEnandhakumarmeNo ratings yet
- Speed Control Methods of DC MotorDocument6 pagesSpeed Control Methods of DC MotorMohd Izzat Abd GhaniNo ratings yet
- Matlab/Simulink Models For Typical Soft Starting Means For A DC MotorDocument6 pagesMatlab/Simulink Models For Typical Soft Starting Means For A DC MotorkensesanNo ratings yet
- DC Machines Lab ManualDocument72 pagesDC Machines Lab ManualPuneeth PuniNo ratings yet
- Ec-I Lab MannualDocument30 pagesEc-I Lab Mannualsmaran247017No ratings yet
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDocument14 pagesAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARNo ratings yet
- Speeed ControlDocument3 pagesSpeeed ControlChristine GomezNo ratings yet
- Original Exp 1 2Document8 pagesOriginal Exp 1 2Kushal SharmaNo ratings yet
- De La Salle University Dasmarinas: Experiment No. 4 DC Shunt MotorDocument6 pagesDe La Salle University Dasmarinas: Experiment No. 4 DC Shunt MotorMizhar GerardoNo ratings yet
- Em 1 TestingDocument13 pagesEm 1 TestingAravindNo ratings yet
- Retardation TestDocument5 pagesRetardation TestAnkit Shetty100% (1)
- No Load and Block Rotor Test 3 PH Ind Motor DolDocument14 pagesNo Load and Block Rotor Test 3 PH Ind Motor DolalexNo ratings yet
- Ame 3L Experiment 4 Speed Control of DC Motor by Armature Resistance Control AIMDocument7 pagesAme 3L Experiment 4 Speed Control of DC Motor by Armature Resistance Control AIMCeline Kate BentayaoNo ratings yet
- Rotating Electrical Machine Lab: B.E. 5 SemesterDocument33 pagesRotating Electrical Machine Lab: B.E. 5 SemesterSuma Rani GNo ratings yet
- Manual EEE2003Document64 pagesManual EEE2003rishanNo ratings yet
- Ashish Singh 2K20CEEE11 Exp-6Document6 pagesAshish Singh 2K20CEEE11 Exp-6Ashish SinghNo ratings yet
- Electrical Machine LabDocument23 pagesElectrical Machine LabAmit kumar singhNo ratings yet
- Speed Control of DC MotorDocument4 pagesSpeed Control of DC MotorjitbakNo ratings yet
- Adobe Scan 17-Oct-2023Document5 pagesAdobe Scan 17-Oct-2023mehra familyNo ratings yet
- Analysis of D.C. Electric Motors: EEEE 531 - Mechatronics Experiment #2Document8 pagesAnalysis of D.C. Electric Motors: EEEE 531 - Mechatronics Experiment #2kay_rolNo ratings yet
- 142 No Load and Block Rotor Test 3 PH Ind Motor Dol PDFDocument15 pages142 No Load and Block Rotor Test 3 PH Ind Motor Dol PDFGopinath B L NaiduNo ratings yet
- Machine Lab CombineDocument38 pagesMachine Lab Combinelakha ramNo ratings yet
- DC Motors Speed Control - ModDocument9 pagesDC Motors Speed Control - ModAnuja VargheseNo ratings yet
- Speed Control of DC Shunt MotorDocument2 pagesSpeed Control of DC Shunt Motoraditya aryaNo ratings yet
- Three-Phase Induction MotorDocument10 pagesThree-Phase Induction MotorMadarwi SarwaNo ratings yet
- DC Motors: 2.0 ObjectivesDocument16 pagesDC Motors: 2.0 ObjectivesBelayet RonyNo ratings yet
- Scalar Control of Ac DrivesDocument38 pagesScalar Control of Ac Drivessureshy-ee213No ratings yet
- Electromechanical Energy Conversion Lab ManualDocument61 pagesElectromechanical Energy Conversion Lab Manualprathyush srinivasanNo ratings yet
- Electric DrivesDocument32 pagesElectric DrivessangsangicnuNo ratings yet
- EM Lab For ECEDocument24 pagesEM Lab For ECEAnbalagan GuruNo ratings yet
- DC Shunt Motor - Field Control MethodDocument4 pagesDC Shunt Motor - Field Control MethodNandha KashwaranNo ratings yet
- Unit Iii Induction Motor Drives: Dept. of EEEDocument17 pagesUnit Iii Induction Motor Drives: Dept. of EEEmanoj kumarNo ratings yet
- Induction MatlabDocument12 pagesInduction Matlabgrido002No ratings yet
- Speed Control of MotorDocument5 pagesSpeed Control of MotorPrabuddha ChakrabortyNo ratings yet
- AC Drive Theory and Application: Benefits of Using AC DrivesDocument8 pagesAC Drive Theory and Application: Benefits of Using AC DrivesRaghu KodiNo ratings yet
- ME2143-1 Lab ManualDocument10 pagesME2143-1 Lab ManualJoshua ChooNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Chapter1 Microchip FabricationDocument39 pagesChapter1 Microchip Fabrication吳文嘉100% (1)
- Challenges Faced by An Economics TeacherDocument8 pagesChallenges Faced by An Economics TeacherSanjay mehta100% (4)
- Chapter 2 Part 2 - Deflection Unit Load MethodDocument51 pagesChapter 2 Part 2 - Deflection Unit Load MethodAnonymous 8f2veZf100% (2)
- (Bradford Books) Sidney I. Wiener, Jeffrey S. Taube - Head Direction Cells and The Neural Mechanisms of Spatial Orientation-The MIT Press (2005)Document503 pages(Bradford Books) Sidney I. Wiener, Jeffrey S. Taube - Head Direction Cells and The Neural Mechanisms of Spatial Orientation-The MIT Press (2005)Víctor FuentesNo ratings yet
- Chapter 3 International Marketing ResearchDocument13 pagesChapter 3 International Marketing ResearchNhat Quang HuynhNo ratings yet
- Act 1Document5 pagesAct 1Yue YueNo ratings yet
- MechanismsDocument22 pagesMechanismssilva, april joy c.No ratings yet
- Assignment # 2 MethodDocument4 pagesAssignment # 2 MethodEmy heartNo ratings yet
- Saribuhay (News) - FINALDocument1 pageSaribuhay (News) - FINALJEREMAEH DELOSANo ratings yet
- Craft Revival ProjectDocument3 pagesCraft Revival Projectkoshalsra3No ratings yet
- Short Circuit Analysis in Unbalanced Distribution Networks: R. Ebrahimi, S. Jamali, A. Gholami and A.BabaeiDocument5 pagesShort Circuit Analysis in Unbalanced Distribution Networks: R. Ebrahimi, S. Jamali, A. Gholami and A.BabaeiAbcdNo ratings yet
- College-Algebra, Take Home Test 2Document3 pagesCollege-Algebra, Take Home Test 2Michelle Morgan LongstrethNo ratings yet
- Lavou 2010Document6 pagesLavou 2010Fadhli LatuconsinaNo ratings yet
- Entrepreneurial DNADocument6 pagesEntrepreneurial DNADylan GregerNo ratings yet
- Bsi BS en 15073 - 2013Document20 pagesBsi BS en 15073 - 2013alferedNo ratings yet
- Cryptography and Network Security: Third Edition by William Stallings Lecture Slides by Lawrie BrownDocument30 pagesCryptography and Network Security: Third Edition by William Stallings Lecture Slides by Lawrie BrownEli PriyatnaNo ratings yet
- Chapter 1Document10 pagesChapter 1Maria Nicole Enciso ReyesNo ratings yet
- Unit 1: Talk 1A: Keeping in Touch I. Write Questions For The Underlined Part of The SentencesDocument103 pagesUnit 1: Talk 1A: Keeping in Touch I. Write Questions For The Underlined Part of The SentencesKadir Sezer ÇiçekNo ratings yet
- Emotional Intelligence in The WorkplaceDocument3 pagesEmotional Intelligence in The WorkplaceShalini ShaliniNo ratings yet
- Sepl Esr GSRDocument4 pagesSepl Esr GSRSyed Mohd MehdiNo ratings yet
- 2000 Words EssayDocument6 pages2000 Words Essaylwfdwwwhd100% (2)
- Aesop Sustainability Report 2021 1670404443Document33 pagesAesop Sustainability Report 2021 1670404443eNo ratings yet
- New TAWS Features: Based On EGPWS ExperienceDocument23 pagesNew TAWS Features: Based On EGPWS ExperienceShimeonNo ratings yet
- Carbonate ClassificationDocument5 pagesCarbonate ClassificationArpit UpadhyayNo ratings yet
- Badminton Lesson Plan Backhand Net ShotDocument3 pagesBadminton Lesson Plan Backhand Net ShotFreddie MoatNo ratings yet
- AQA-Physics Experiments PDFDocument63 pagesAQA-Physics Experiments PDFAnonymous zfqrXhuNo ratings yet
- Mental Health TalkDocument78 pagesMental Health Talkram100% (2)
























































































Download as pdf or txt
You might also like
- IB Physics D.1 PPT TEACHERDocument36 pagesIB Physics D.1 PPT TEACHERPio100% (2)
- Mg623 - Project Management PlanDocument79 pagesMg623 - Project Management PlanIBRAHIM NYIRENDANo ratings yet
- LAB REPORT NO 12 (Electrical Engineering)Document8 pagesLAB REPORT NO 12 (Electrical Engineering)Malik Hassaan SangraalNo ratings yet
- Earth-And-Life-Science-G11-Whlp-Week-1-2 - Quarter 2 HeDocument2 pagesEarth-And-Life-Science-G11-Whlp-Week-1-2 - Quarter 2 Hecristina maquinto100% (5)
- Lab 11 (Hardware Practice) PDFDocument7 pagesLab 11 (Hardware Practice) PDFzeeshan shaukatNo ratings yet
- Experiment 2Document4 pagesExperiment 2dhruvmistry300No ratings yet
- Starting, Speed Control....Document6 pagesStarting, Speed Control....dickmjoloNo ratings yet
- Experiment 3Document10 pagesExperiment 3عبدالعزيز شقحانNo ratings yet
- Speed Control of DC Shunt MotorDocument7 pagesSpeed Control of DC Shunt MotorAakash0% (1)
- Speed Control and Starting of A DC MotorDocument56 pagesSpeed Control and Starting of A DC MotorCarlos Arias LuyandoNo ratings yet
- Lab Info. - Synchronous Machine ExperimentsDocument3 pagesLab Info. - Synchronous Machine ExperimentsmikeNo ratings yet
- Ac Servo MotorDocument14 pagesAc Servo MotorJeyanthNo ratings yet
- Speed Control of DC Shunt Motor: A) Field Current Control B) Armature Voltage ControlDocument8 pagesSpeed Control of DC Shunt Motor: A) Field Current Control B) Armature Voltage ControlAkshit VSNo ratings yet
- Starting Methods of A DC MotorDocument8 pagesStarting Methods of A DC Motoragreykato100% (1)
- 9 Speed Control of DC Shunt MotorDocument4 pages9 Speed Control of DC Shunt MotormanishNo ratings yet
- Control Material Module IIDocument15 pagesControl Material Module IIAbiodun MustaphaNo ratings yet
- 9 Speed Control of DC Shunt MotorDocument4 pages9 Speed Control of DC Shunt MotorVaibhavNo ratings yet
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryDocument6 pagesExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalNo ratings yet
- Speed Control of DC MotorDocument15 pagesSpeed Control of DC Motorkrishnareddy_chintalaNo ratings yet
- OEL of Electrict Machine by Bolo EhsannDocument4 pagesOEL of Electrict Machine by Bolo EhsannEhsan Ullah BhuttaNo ratings yet
- Question No 1: Speed Control of DC MotorDocument10 pagesQuestion No 1: Speed Control of DC MotorProxima YusNo ratings yet
- Blocked Rotor TestDocument11 pagesBlocked Rotor TestIjabi100% (1)
- RBT Lab Manuval 11E608 CEDocument106 pagesRBT Lab Manuval 11E608 CEnandhakumarmeNo ratings yet
- Speed Control Methods of DC MotorDocument6 pagesSpeed Control Methods of DC MotorMohd Izzat Abd GhaniNo ratings yet
- Matlab/Simulink Models For Typical Soft Starting Means For A DC MotorDocument6 pagesMatlab/Simulink Models For Typical Soft Starting Means For A DC MotorkensesanNo ratings yet
- DC Machines Lab ManualDocument72 pagesDC Machines Lab ManualPuneeth PuniNo ratings yet
- Ec-I Lab MannualDocument30 pagesEc-I Lab Mannualsmaran247017No ratings yet
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDocument14 pagesAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARNo ratings yet
- Speeed ControlDocument3 pagesSpeeed ControlChristine GomezNo ratings yet
- Original Exp 1 2Document8 pagesOriginal Exp 1 2Kushal SharmaNo ratings yet
- De La Salle University Dasmarinas: Experiment No. 4 DC Shunt MotorDocument6 pagesDe La Salle University Dasmarinas: Experiment No. 4 DC Shunt MotorMizhar GerardoNo ratings yet
- Em 1 TestingDocument13 pagesEm 1 TestingAravindNo ratings yet
- Retardation TestDocument5 pagesRetardation TestAnkit Shetty100% (1)
- No Load and Block Rotor Test 3 PH Ind Motor DolDocument14 pagesNo Load and Block Rotor Test 3 PH Ind Motor DolalexNo ratings yet
- Ame 3L Experiment 4 Speed Control of DC Motor by Armature Resistance Control AIMDocument7 pagesAme 3L Experiment 4 Speed Control of DC Motor by Armature Resistance Control AIMCeline Kate BentayaoNo ratings yet
- Rotating Electrical Machine Lab: B.E. 5 SemesterDocument33 pagesRotating Electrical Machine Lab: B.E. 5 SemesterSuma Rani GNo ratings yet
- Manual EEE2003Document64 pagesManual EEE2003rishanNo ratings yet
- Ashish Singh 2K20CEEE11 Exp-6Document6 pagesAshish Singh 2K20CEEE11 Exp-6Ashish SinghNo ratings yet
- Electrical Machine LabDocument23 pagesElectrical Machine LabAmit kumar singhNo ratings yet
- Speed Control of DC MotorDocument4 pagesSpeed Control of DC MotorjitbakNo ratings yet
- Adobe Scan 17-Oct-2023Document5 pagesAdobe Scan 17-Oct-2023mehra familyNo ratings yet
- Analysis of D.C. Electric Motors: EEEE 531 - Mechatronics Experiment #2Document8 pagesAnalysis of D.C. Electric Motors: EEEE 531 - Mechatronics Experiment #2kay_rolNo ratings yet
- 142 No Load and Block Rotor Test 3 PH Ind Motor Dol PDFDocument15 pages142 No Load and Block Rotor Test 3 PH Ind Motor Dol PDFGopinath B L NaiduNo ratings yet
- Machine Lab CombineDocument38 pagesMachine Lab Combinelakha ramNo ratings yet
- DC Motors Speed Control - ModDocument9 pagesDC Motors Speed Control - ModAnuja VargheseNo ratings yet
- Speed Control of DC Shunt MotorDocument2 pagesSpeed Control of DC Shunt Motoraditya aryaNo ratings yet
- Three-Phase Induction MotorDocument10 pagesThree-Phase Induction MotorMadarwi SarwaNo ratings yet
- DC Motors: 2.0 ObjectivesDocument16 pagesDC Motors: 2.0 ObjectivesBelayet RonyNo ratings yet
- Scalar Control of Ac DrivesDocument38 pagesScalar Control of Ac Drivessureshy-ee213No ratings yet
- Electromechanical Energy Conversion Lab ManualDocument61 pagesElectromechanical Energy Conversion Lab Manualprathyush srinivasanNo ratings yet
- Electric DrivesDocument32 pagesElectric DrivessangsangicnuNo ratings yet
- EM Lab For ECEDocument24 pagesEM Lab For ECEAnbalagan GuruNo ratings yet
- DC Shunt Motor - Field Control MethodDocument4 pagesDC Shunt Motor - Field Control MethodNandha KashwaranNo ratings yet
- Unit Iii Induction Motor Drives: Dept. of EEEDocument17 pagesUnit Iii Induction Motor Drives: Dept. of EEEmanoj kumarNo ratings yet
- Induction MatlabDocument12 pagesInduction Matlabgrido002No ratings yet
- Speed Control of MotorDocument5 pagesSpeed Control of MotorPrabuddha ChakrabortyNo ratings yet
- AC Drive Theory and Application: Benefits of Using AC DrivesDocument8 pagesAC Drive Theory and Application: Benefits of Using AC DrivesRaghu KodiNo ratings yet
- ME2143-1 Lab ManualDocument10 pagesME2143-1 Lab ManualJoshua ChooNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Chapter1 Microchip FabricationDocument39 pagesChapter1 Microchip Fabrication吳文嘉100% (1)
- Challenges Faced by An Economics TeacherDocument8 pagesChallenges Faced by An Economics TeacherSanjay mehta100% (4)
- Chapter 2 Part 2 - Deflection Unit Load MethodDocument51 pagesChapter 2 Part 2 - Deflection Unit Load MethodAnonymous 8f2veZf100% (2)
- (Bradford Books) Sidney I. Wiener, Jeffrey S. Taube - Head Direction Cells and The Neural Mechanisms of Spatial Orientation-The MIT Press (2005)Document503 pages(Bradford Books) Sidney I. Wiener, Jeffrey S. Taube - Head Direction Cells and The Neural Mechanisms of Spatial Orientation-The MIT Press (2005)Víctor FuentesNo ratings yet
- Chapter 3 International Marketing ResearchDocument13 pagesChapter 3 International Marketing ResearchNhat Quang HuynhNo ratings yet
- Act 1Document5 pagesAct 1Yue YueNo ratings yet
- MechanismsDocument22 pagesMechanismssilva, april joy c.No ratings yet
- Assignment # 2 MethodDocument4 pagesAssignment # 2 MethodEmy heartNo ratings yet
- Saribuhay (News) - FINALDocument1 pageSaribuhay (News) - FINALJEREMAEH DELOSANo ratings yet
- Craft Revival ProjectDocument3 pagesCraft Revival Projectkoshalsra3No ratings yet
- Short Circuit Analysis in Unbalanced Distribution Networks: R. Ebrahimi, S. Jamali, A. Gholami and A.BabaeiDocument5 pagesShort Circuit Analysis in Unbalanced Distribution Networks: R. Ebrahimi, S. Jamali, A. Gholami and A.BabaeiAbcdNo ratings yet
- College-Algebra, Take Home Test 2Document3 pagesCollege-Algebra, Take Home Test 2Michelle Morgan LongstrethNo ratings yet
- Lavou 2010Document6 pagesLavou 2010Fadhli LatuconsinaNo ratings yet
- Entrepreneurial DNADocument6 pagesEntrepreneurial DNADylan GregerNo ratings yet
- Bsi BS en 15073 - 2013Document20 pagesBsi BS en 15073 - 2013alferedNo ratings yet
- Cryptography and Network Security: Third Edition by William Stallings Lecture Slides by Lawrie BrownDocument30 pagesCryptography and Network Security: Third Edition by William Stallings Lecture Slides by Lawrie BrownEli PriyatnaNo ratings yet
- Chapter 1Document10 pagesChapter 1Maria Nicole Enciso ReyesNo ratings yet
- Unit 1: Talk 1A: Keeping in Touch I. Write Questions For The Underlined Part of The SentencesDocument103 pagesUnit 1: Talk 1A: Keeping in Touch I. Write Questions For The Underlined Part of The SentencesKadir Sezer ÇiçekNo ratings yet
- Emotional Intelligence in The WorkplaceDocument3 pagesEmotional Intelligence in The WorkplaceShalini ShaliniNo ratings yet
- Sepl Esr GSRDocument4 pagesSepl Esr GSRSyed Mohd MehdiNo ratings yet
- 2000 Words EssayDocument6 pages2000 Words Essaylwfdwwwhd100% (2)
- Aesop Sustainability Report 2021 1670404443Document33 pagesAesop Sustainability Report 2021 1670404443eNo ratings yet
- New TAWS Features: Based On EGPWS ExperienceDocument23 pagesNew TAWS Features: Based On EGPWS ExperienceShimeonNo ratings yet
- Carbonate ClassificationDocument5 pagesCarbonate ClassificationArpit UpadhyayNo ratings yet
- Badminton Lesson Plan Backhand Net ShotDocument3 pagesBadminton Lesson Plan Backhand Net ShotFreddie MoatNo ratings yet
- AQA-Physics Experiments PDFDocument63 pagesAQA-Physics Experiments PDFAnonymous zfqrXhuNo ratings yet
- Mental Health TalkDocument78 pagesMental Health Talkram100% (2)